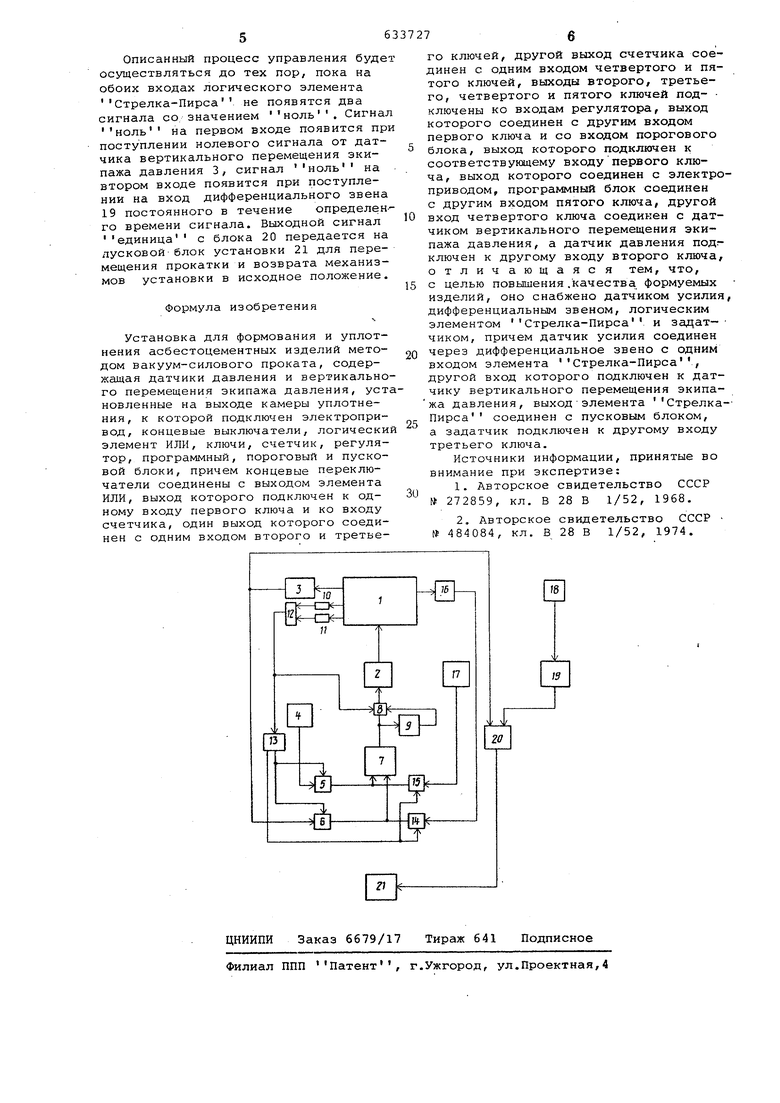
Эта цель достигается тем, что установка для формование и, упяртнения асбестоцементных изделий методом вакуум-силового проката,- содержащая Сдатчики давления и, вертикального пере мещения экипажа, установленные на выходе камеры уплотнения, к которой под ключей электропривод, концевые выключатели, логический элемент ИЛИ, ключи, счетчик, регулятор программный, пороговый и пусковой блоки, причем концевые переключатели соединены с выходом элемента ИЛИ, выход которого подключен к одному входу первого ключа и ко входу счетчика/ один выход которого соединен с одним входом второго и третьего ключей, другой выход счетчика соединен с одним входом четвертого и пятого ключей, выходы второ го, третьего, четвертого и пятого клю чей подключены ко входам регулятора, выход которого соединен с другим входом первого ключа и со входом порогового блока, выход которого подключен к соответствуюцему входу первого ключа выход которого соединен с электроприводом, программный блок соединен с другим :входом1 пятого ключа, другой вход четвертого ключа соединен с датчиком вертикального перемещения экипажа давления, а датчик давления подключен к другому входу второго клю ча, снабжена датчиком усилия, дифференциальньом эвеном, логическим элемен том Стрелка-Пирса, и задатчиком, причем датчик усилия соединен через дифференциальное звено с одним входом элемента Стрелка-Пирса, другой вход которого подключен к датчику вертикального перемещения экипажа дав ления, выход элемент Стрелка-Пирса соединен с пусковым блоком, а задат чик подключен к другому входу третье го ключа. Установка для формования и уплотнения асбестоцементных изделий методом вакуум-силового проката представ лена на чертеже. В предлагаемой установке .асбестоцементная масса или лист, подлежащий уплотнению, помещаются в камеру 1. Экипаж давления опускается на формуемое, уплотняемое изделие электроприводом 2 вертикального перемещения. В первой стадии опускание экипажа давления осуществляется с помощью программной следящей системы, состоящей из датчика вертикального перемещения экипажа давления 3, программного бло ка 4, ключей 5 и 6, регулятора 7, клю ча 8 и порогового блока 9. Горизонтальное перемещение экипажа давления и вращение уплотняющих, валков осуществляется от приводов, на данном чертеже не показанных. В момент остановки, экипажа давления в крайнем левом или правом положении сигнал от концевого выключателя 10 или 11 через элемент 12 поступает на включакаций вход ключа 8, в результате чего выходное напряжение регулятора 7 подается на управлякядий вход электропривода 2. Экипаж, давления опускается до тех пор, пока с датчика перемещения 3 не сравняется с выходным напряжением программного блока 4. В момент баланса напряжений входных сигналов регулятора 7, его входное напряжение также становится близким к нулю, поэтому на выходе подключенного к нему порогового блока 9 образуется сигнал, который вызывает отключение электронного ключа 8и выключение привода горизонтальной подачи экипажа. Когда экипаж закончит горизонтальное перемещение у противоположного концевого выключателя, цикл програм-: мной вертикальной подачи повторяется. Наличие ключа 8 обусловлено тем, что программный блок 4 вьадает непрерывно возрастающий по напряжению аналоговый сигнал, а опускание экипажа должно происходить только в момент его ос-. тановки в крайнем положении горизонтальной траектории..Стадия программной; вертикальной подачи экипажа заканчивается по сигналу счетчика 13 числа горизонтальных ходов экипажа, с помощью которого задается длительность первой стадии процесса формования. При появлении сигнала на прямсач выходе счетчика 13 на его инверсном выходе исчезает. В результате ключи 5 и б, соединенные с инверсным выходом счетчика отключаются, а ключи 14 и 15, соединенные с прямым выходом счетчика, включаются. На второй стадии управление вертикальной подачей экипажа давления осуществляется с помощью системы, состоящей из датчика давления 16, задатчика неразрушающего давления на уплотняемый материал 17,датчика усилия тяги экипажа давления 18,дифференциального звена 19,логического элемента Стрелка Пирса , (инверсия суммы 20), датчика вертикальных перемещений эки.пажа давления 3, регулятора 7, ключа 8 и электропривода 2. Сигнал от задатчика давления 17 поступает через ключ 15 на вход регулятора 7 в качест.ве задакяцего сигнала. |,В момент остановки привода горизонтального перемещения экипаж давления по сигналу блока 12 ключ 8 замыкается и экипаж опускается приводом до тех пор, пока сигнал датчика давления 16 не сравняется с задающим напряжением задатчика давления 17. При этом выключается пороговый блок 9, по сигналу которого будет разомкнут ключ 8 и включен привод горизонтального перемещения экипажа. В момент остановки экипажа в противоположном горизонтальном положении цикл повторяётся .
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для формования асбестоцементных изделий методом вакуумсилового проката | 1974 |
|
SU484084A1 |
| Установка для формования асбестоцементных труб | 1974 |
|
SU563295A1 |
| Устройство для управления трубоформовочной машиной | 1976 |
|
SU551170A1 |
| Устройство контроля работы асботрубных машин | 1973 |
|
SU469604A1 |
| СПОСОБ УПРАВЛЕНИЯ МАШИНОЙ ДЛЯ ФОРМОВАНИЯ АСБЕСТОЦЕМЕНТНЫХ ТРУБ | 1972 |
|
SU433031A1 |
| Программный регулятор | 1986 |
|
SU1495745A1 |
| Электропривод переменного тока | 1986 |
|
SU1334342A1 |
| Электропривод | 1987 |
|
SU1534723A1 |
| ФУНКЦИОНАЛЬНО-МОДЕЛИРУЮЩИЙ СТЕНД ДЛЯ СОЗДАНИЯ УСЛОВИЙ ИНТЕРАКТИВНОГО БЕЗОПОРНОГО ПРОСТРАНСТВА И ПОНИЖЕННОЙ ГРАВИТАЦИИ | 2012 |
|
RU2518478C2 |
| Устройство для регулирования технологических параметров по заданной программе | 1983 |
|
SU1136121A1 |
