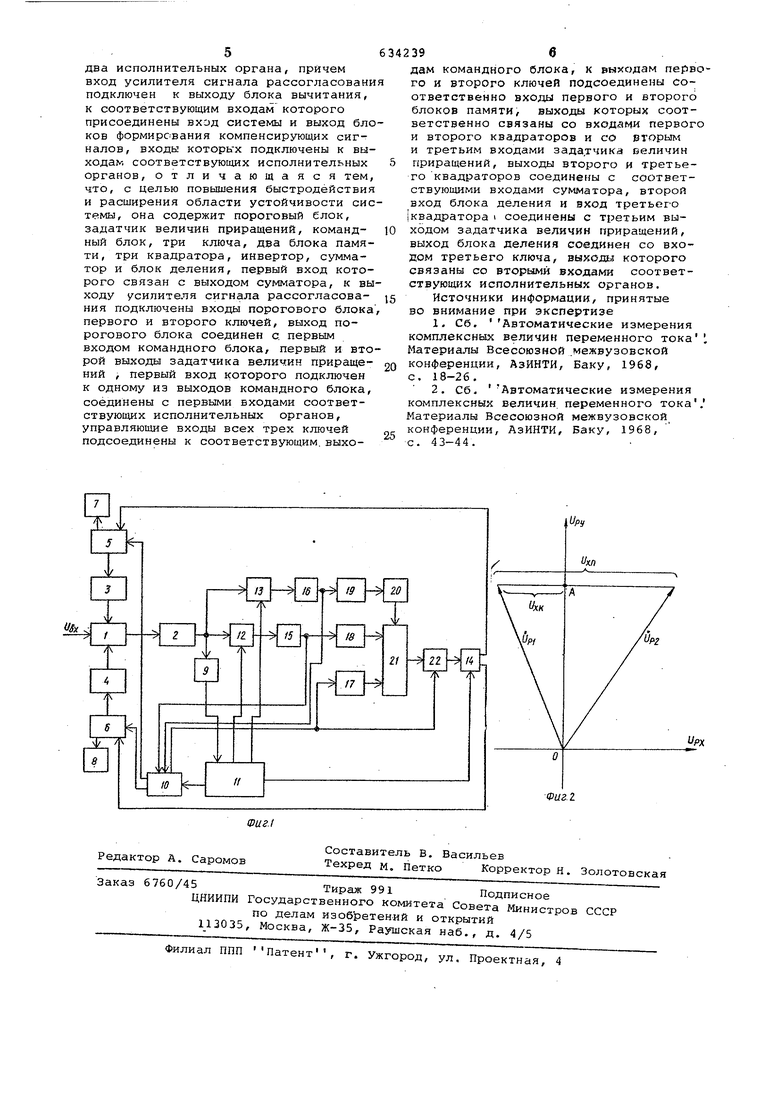
Изобретение относится к области автоматики и может быть использовано в автоматических системах с уравновешиванием. Известны автоматические системы компенсации 1 , содержащие фоточувствительные детекторы. Их недостат ками являются низкое быстродействие и ограниченная область устойчивости. Известна также автоматическая сиетема компенсации 2 , содержащая уси литель сигнала рассогласования, блок вычитания, два блока компенсирующих сигналов, два исполнительных органа причем вход усилителя сигнала рассогласования подключен к выходу блока вычитания, к соответствующим входам которого присоединены вход системы. и выхода блоков формирования компенсирующих сигналов, входы которых подключены к выходам соответствующих ис полнительных органов. Недостатками всех этих устройств являются относительно низкое быстро действие и ограниченная область устойчивости, что обуславливаетя вза имосвязью сигналов, сформированных фазочувствительными детекторами. Вследствие взаимосвязи сигналов управления по из составляющих контуры уравновешивания становятся в взаимозависимыми, управляющее воздействие на одной из составляющих вызывает регулировку пр другой составляющей, что приводит к возникновению циклов периодических режимов, вызывает появление ложных шагов отработки. Целью изобретения является- повышение быстродействия и расширение области устойчивости системы. Указанная цель достигается тем, что система содержит пороговый блок, задатчик величин приращений, командный блок, три ключа, два блока памяти, три квадратора, инвертор, сумматор и блок деления, первый вход которого связан с выходом сумматора, к выходу усилителя сигнала рассогласования подключены входы порогового блока, первого и второго ключей , выход порого вого блока соединен с первым входом командного блока, первый и второй вы- ходы задатчика величин приращений, первый вход которого подключен к одному из выходов командного блока, соединены с первыг.а1 входами соответствующих исполнительных органов, управляю1цие входы трех ключей подсоединены к соответствующим выходам командного блока, к выходам первого и второго ключей подсоединены соответственно «ходы первого и второго блоков памяти, выходы которых соответственно связаны входами первого и второго квадраторо и со вторым и третьим входами задатчиков величин приращений, выходы второго и третьего квадраторов соединены с соответствующими входами сумматора, второй вход блока деления и вход третьего квадратора соединены с третьим выходом задатчика величин приращений, выход блока делени соединен со входом третьего ключа, выходы которого связаны со вторыми входами соответствующих исполнительных органов. На . 1 изображена структурная схема автоматической системы компенсации согласно изобретений) на фиг. изображена векторная диаграмма процесса уравновешивания. Она содержит блок вычитания 1, усилитель сигнала рассогласования 2, блоки формирования компенсирующих сигналов 3 и 4 составляющих .и У соответственно, исполнительные органы 5 и б, цифровы индикаторы 7 и 8, пороговый блок 9, задатчик величин приращений 10, командный блок 11, ключи 12, 13, 14, блоки памяти 15 и 16, квадраторы 17, 18, 19, инвертор 20, сумматор 21, блок деления 22., , Устройство работает следующим образом. При превышении разностным сигналом , уровня порога срабатывания порогового блока 9, последний срабатывает и приводит в действием командный блок 11. Командный блок 11 выдает сигнал на ключ 12, который, кратковременно замыкаясь, пропускает разностный сигнал на блок памяти ,15, в котором запоминается модуль U сигнала рассогласования Up. Далее этот сигнал подается на один из входов задатчика величин при ращений 10, который по сигналу с ко мандного блока 11 и в соответствии с модулем Up вырабатывает задающе воздействиеи(,„, «на исполнительный орган одной из составляющих 5 или 6 Компенсирующий сигнал по этой состав ляющей изменяется на выбранную величину при помощи исполнительного орга на 5 (или 6) и блока, компенсирующих сигналов 3 (или 4) . После этого командный блок 11 выдает сигнал на кратковременное замыкание ключа 13, и измененное значени разностного сигнала U запоминается в блоке памяти 16. Затем значения а также U поданные с задатчика величин приращений 10j возводятся в квадрат в квадраторах 17, 18, 19. Значение Up инвертирует ся инвертором 20. Все эти сигналы суммируются в сумматоре 21,, на выход KojopojO получается сигнал U Up В блоке деления 22 4 начение и делится на , Сигали)( поступает с задатчика велиин приращений 10. Командный блок . этому времени переключает ключ в акое положение, при котором сигнал xcvifc выхода блока деления 22 постуает на исполнительный орган той оставляющей, по которой произведено робное приращение. Исполнительный, рган изменяет компенсирующий сигнал о этой составляющей на величину P,( При ЭТОМ задатчик величин приращеий 10 по команде с командного блока 11 нимает пробное приращение. Затем командный блок 11 при помощи адатчика величин приращений 10 задает риращение по другой составляющей, далее цикл повторяется уже для ругой с.оставляющей. При этом командный лок 11 переключает ключ 14 во второе оложение. На фиг. 2 изображена векторная иаграмма процесса уравновешивания. Из нее видно, что Ux., i (и,..-и..,.) Вычитая из второго уравнения третье, получим , ги,„и,,..и.. Откуда следует справедливость вы ражения () Таким образом, использование информации о приведенных параметрах процесса уравновешивания и осуществление в устройстве последовательности действий позволяет полностью развязать контуры уравновешивания. Каждый из к контуров становится нeзaвиcи {ым от другой, поэтому область устойчивости значительно расширяется, что приводит к повышению быстродействия автоматических систем комплексного типа, так как уравновешивание в принципе может быть осуществлено за две операции . Таким образом, изобретение дает возможность строить быстродействующие и устойчивые системы, свободные от влияния фазовых искажений в каналах уравновешивания, а также от воздействия взаимосвязи контуров, специфичной для экстремальных систем. Формула изобретения Автоматическая система компенсации, содержащая усилитель сигнала рассогласования, блок вычитания, два блока формирования компенсирующих сигналов. два исполнительных органа, причем вход усилителя сигнала рассогласовани подключен к выходу блока вычитания, к соответствующим входам которого присоединены вход системы и выход бло ков формирования компенсирующих сигналов, входы которьх подключены к выходам соответствующих исполнительных органов, отличающаяся тем, что, с целью повышения быстродействия и расширения области устойчивости сис темы, она содержит пороговый блок, задатчик величин приращений, командный блок, три ключа, два блока памяти, три квадратора, инвертор, сумматор и блок деления, первый вход которого связан с выходом сумматора, к вы ходу усилителя сигнала рассогласования подключены входы порогового блока первого и второго ключей, выход порогового блока соединен с. первым входом командного блока/ первый и вто рой вьоходы задатчика величин приращеНИИ , первый вход которого подключен к одному из выходов командного блока, соединены с первыми входами соответствующих исполнительных органов, управляющие входы всех трех ключей подсоединены к соответствующим, выхо39бдам командного блока, к выходам первого и второго ключей подсоединены соответственно входы первого и второго блоков памяти, выходы которых соответственно связаны со входами первого и второго квадраторов и со вторым и третьим входами задатчика величин приращений, выходы второго и третьего квадраторов соединены с соответствующими входами сумматора, второй вход блока деления и вход третьего |квадратора i соединены с третьим выходом задатчика величин приращений, выход блока деления соединен со входом третьего ключа, выходы которого связаны со вторыми входами соответствующих исполнительных органов. Источники информации, принятые во внимание при экспертизе 1.Сб. Автоматические измерения комплексных величин переменного тока , Материалы Всесоюзной .межвузовской конференции, АзИНТИ, Баку, 1968, с. 18-26. 2.Сб. Автоматические измерения комплексных величин переменного тока . Материалы Всесоюзной межвузовской конференции, АзИНТИ, Баку, 1968, с. 43-44.
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система управления | 1984 |
|
SU1257607A1 |
| Регулятор скорости движения транспортного средства | 1986 |
|
SU1498646A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| Устройство автоматического регулирования скорости подачи угледобывающей машины | 1980 |
|
SU928007A1 |
| Автоматический цифровой измеритель коэффициента гармоник | 1980 |
|
SU911363A1 |
| Система автоматического управления трубоформовочной машиной | 1983 |
|
SU1123854A1 |
| Устройство для регулирования массовых расходов смешиваемых продуктов | 1988 |
|
SU1695273A1 |
| Адаптивная система управления | 1985 |
|
SU1361502A1 |
| Электропривод постоянного тока | 1989 |
|
SU1656653A1 |
| Система оптимизации управления непосредственно и косвенно управляемыми объектами | 1982 |
|
SU1080117A1 |
