Изобретение относится к сг{ецнализированным вычислительным устройствам и может быть использовано в системах цифрового п|М)граммиого управления, иапример. металлорежущими станками.
Известны устройства- круговой иитерполяции, работающие по методу оценочной функции (}. Такие иитерполягоры содержат счетчики координат X и У, выходы которых соединены с информационными входами сумматора и входами блока сравиения текущих координат, выход которого соедииеи с первым входом блока выбора сектора и такта интерполяции, второй вход которого связан с выходом генератора тактовых, импульсов, выходы блока выбора сектора и такта интерполяции соединены со счетиыми входами счетчиков координат и с соответствующими входами сумматора для управлеиия приемом информации из счетчиков координат.
Основным недостатком этих интерполяторов является невысокая точность. Погрешиость интерполяции в иих достигает величины шага интерполяции.
Целью изобретения является повышение точности круговой интерполяции.
Цель достигается тем, что в предлагаемое устройство введен блок сравиеиия оценочной функции с радиусом интерполируемой окружности, первый вход которого связан с выходом сумматора, второй вход соединен с шиной сигнала зиачения радиуса, а выход соединен с соответствующим входом схемы выбора сектора и такта иитерполяции.
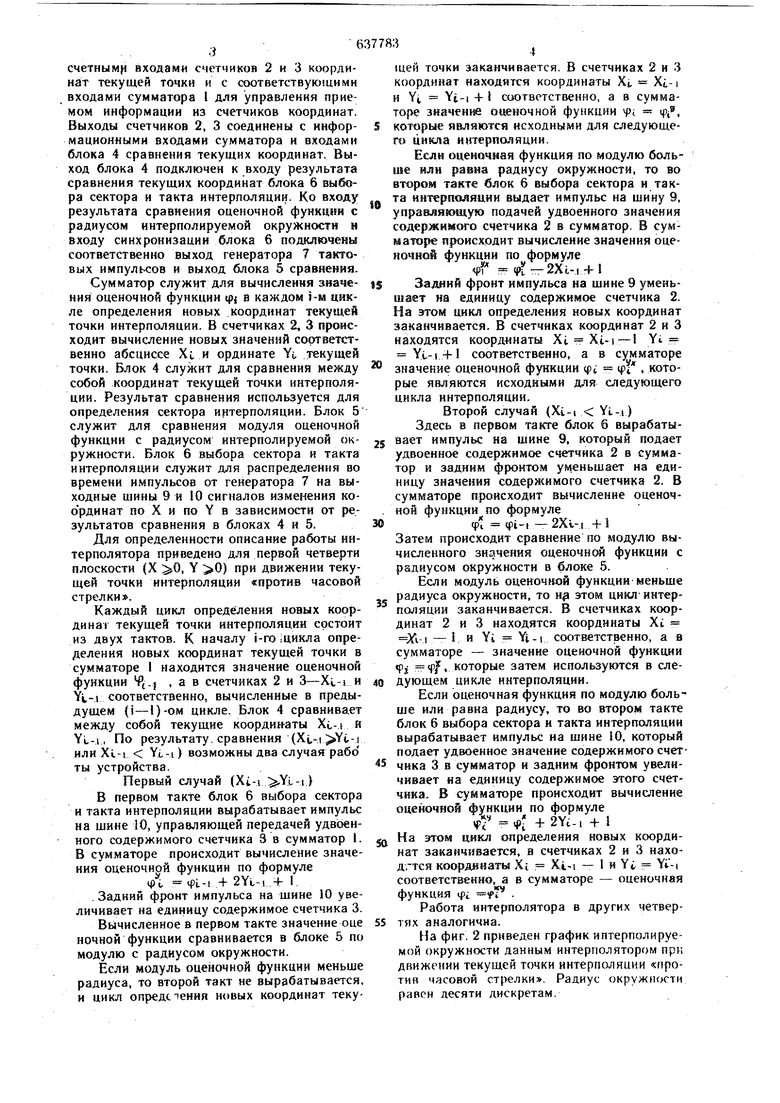
На фиг. I изображеиа функциональная схема кругового интерполятора; на фиг. 2 - пример интерполяции окружности данным интерполятором.
Функциона.1ьиая схема кругового интерполятора включает в себя иакапливаюший сумматор с управляемыми инфс мациоиными входами, реверсивиын счетчик 2 абсциссы X текущей точки, реверсивный счетчик 3 ординаты У текущей точки, блок 4 сравиения текущих координат А и Y, блок 5 сравиеиия оценочной функции с радиусом интерполируемой окружности, блок 6 выбора сектора и такта интерполяции, генератор 7 тактовых импульсов. Входы блока 5 сравнения оценочной функции с радиусом подключены к выходу сумматора 1 и шнне 8 сигнала значения радиуса. Выходы 9 и 10 блока б выбора сектора и такта интерполяции соединены соответственно со счетным входами счетчиков 2 и 3 координат текущей точки и с соответствующими входами сумматора 1 для управления приемом информации из счетчиков коордииат. Выходы счетчиков 2, 3 соединены с информационными входами сумматора и входами блока 4 сравнения текущих координат. Выход блока 4 подключен к входу результата сравнения текущих координат блока 6 выбора сектора и такта интерполяции. Ко входу результата сравнения оценочной функции с радиусом интерполируемой окружности н входу синхронизации блока 6 подключены соответственно выход генератора 7 тактовых импульсов и выход блока 5 сравнения. Сумматор служит для вычисления значения оценочной функции ф{ в каждом i-м цикле определения новых координат текущей точки интерполяции. В счетчиках 2, 3 происходит вычисление новых значений сортветственно абсциссе Xi. и ординате Yi, текущей точки. Блок 4 служит для сравнения между собой координат текущей точки интерполяции. Результат сравнения используется для определения сектора интерполяции. Блок 5 служит для сравнения модуля оценочной функции с радиусом интерполируемой окружности. Блок 6 выбора сектора и такта интерполяции служит для распределения во времени импульсов от генератора 7 на выходные шины 9 и 0 сигналов изменения координат по X и по Y в зависимости от результатов сравнения в блоках 4 н 5. Для определенности описание работы интерполятора приведено для первой четверти плоскости (X 0, У 0) при движении текущей точки интерполяции «против часовой стрелки. Каждый цикл определения новых координаг текущей точки интерполяции состоит из двух тактов. К началу i-ro |цикла определения новых координат текущей точки в сумматоре I находится значение оценочной функцин P.j . а в счетчиках 2 и 3-Xi-i и соответственно, вычисленные в предыдущем (i-1)-ом цикле. Блок 4 сравнивает между собой текущие координаты Xc-t и Yi-i, По результату, еравнeния(,или XL-I Yi-t) возможны два случая рабо ты устройства. Первый случай (Xi-i .YL-i) В первом такте блок 6 выбора сектора и такта интерполяции вырабатывает импульс на щине 10, управляющей передачей удвоенного содержимого счетчика 3 в сумматор 1. В сумматоре происходит вычисление значения оценочной функции по формуле Ф1 Ф1-1 -I- 2YL-1 .4- I. . Задний фронт импульса на щине 10 увеличивает на единицу содержимое счетчика 3. Вычисленное в первом такте значенне оце ночной функции сравнивается в блоке 5 по модулю с радиусом окружности. Если модуль оценочной функции меньше радиуса, то второй такт не вырабатывается, и цикл опредс1ения новых координат теку цен точки заканчивается. В счетчиках 2 и 3 коордииат находятся координаты Xj, XL-I н YI Yi-i -f { соответственно, a в сумматоре значение оадночной функции ф( Ф, которые являются исходными для следующе ч цикла интерполяции. Если оценочная функция по модулю больше или равна радиусу окружности, то во втором такте блок 6 выбора сектора и такта интерполяции выдает импульс на шину 9, управляйнцую подачей удвоенного значения содержимого счетчика 2 в сумматор. В сумматоре происходит вычисление значения оценочной функции по формуле Ф ч 1-2X1-1-fl Задний фронт импульса на щине 9 уменьшает на единицу содержимое счетчика 2. На этом цикл определения новых координат заканчивается. В счетчиках координат 2 и 3 находятся координаты Xl Xi-i - Yi Yl-i +1 соответственно, a в сумматоре значение оценочной функции фь tfi , которые являются исходными для следующего цикла интерполяции. Второй случай (Xi-i Yl-i) Здесь в первом такте блок б вырабатывает импульс на шине 9, который подает удвоенное содержимое счетчика 2 в сумматор и задним фронтом уменьшает на единицу значения содержимого счетчика 2. В сумматоре происходит вычисление оценочной функции по формуле ф1 ф1-,-2Х1-1 +5 Затем происходит сравнение по модулю вычисленного значения оценочной функции с радиусом окружности в блоке 5. Если модуль оценочной функции меньше радиуса окружности, то нэ этом цикл интерполяции заканчивается. В счетчиках координат 2 и 3 находятся координаты Xi - I и Yi i-i соответственно, а в сумматоре - значение оценочной функции Pj pf, которые затем используются в следующем цикле интерполяции. Если оценочная функция по модулю больще или равна радиусу, то во втором такте блок 6 выбора сектора и такта интерполяции вырабатывает импульс на шине 10, который подает удвоенное значение содержимого счетчика 3 в сумматор и задним фронтом увеличивает на единицу содержимое этого счетчика. В сумматоре происходит вычисление оценочной функции по формуле Г :- + 2Yi-, + На этом цикл определения новых координат заканчивается, в счетчиках 2 и 3 находгтся координаты Xi Xt-i - 1 и Yi Yi-i соответственно, а в сумматоре - оценочная функция ф -fi . Работа интерполятора в других четвертях аналогична. На фиг. 2 приведен график интерполируемой окружности данным интерпо тятором при движении текущей точки интерполяции «против часовой стрелки. Радиус окружности равен десяти дискретам.

| название | год | авторы | номер документа |
|---|---|---|---|
| Интерполятор | 1987 |
|
SU1413602A1 |
| Линейно-круговой интерполятор | 1985 |
|
SU1259218A1 |
| Интерполятор | 1988 |
|
SU1541557A1 |
| Круговой интерполятор | 1989 |
|
SU1665341A1 |
| Линейно-круговой интерполятор | 1984 |
|
SU1215090A2 |
| Многокоординатный цифровой линейный интерполятор | 1987 |
|
SU1522154A1 |
| Многокоординатный линейно-круговой интерполятор | 1988 |
|
SU1603345A1 |
| Линейный интерполятор | 1988 |
|
SU1538166A2 |
| Многокоординатный линейно-круговой интерполятор | 1984 |
|
SU1156008A1 |
| Линейно-круговой интерполятор | 1989 |
|
SU1695265A1 |
