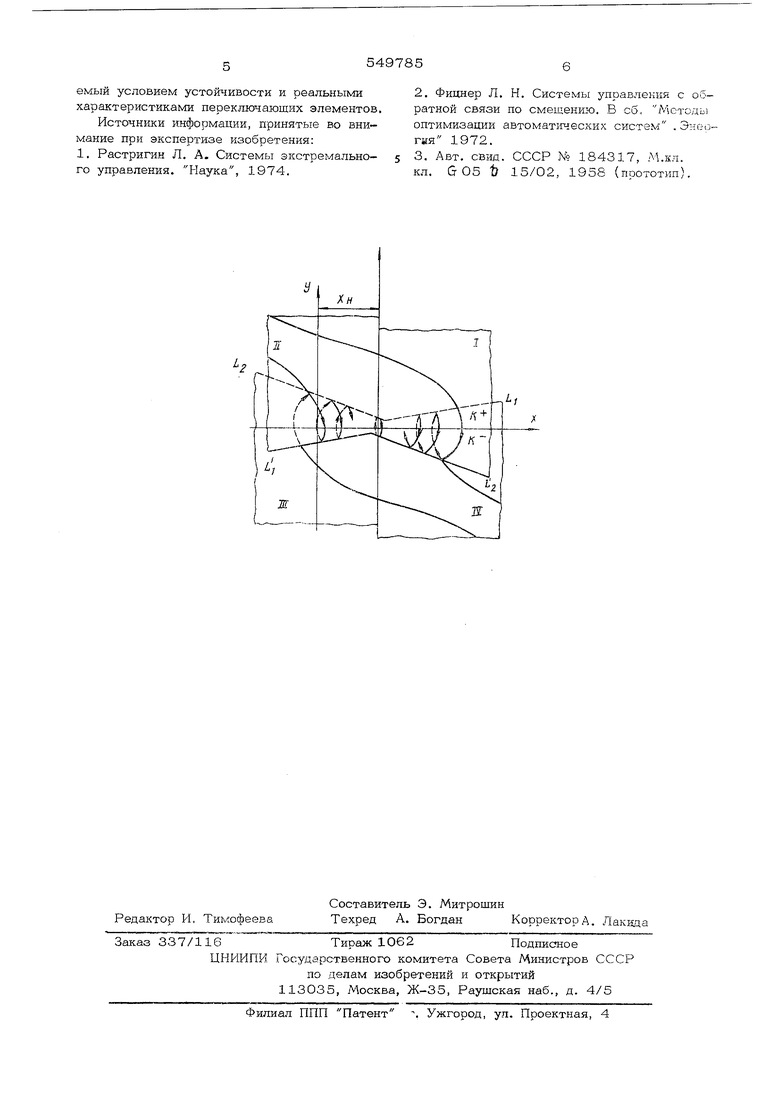
54 i: функция качества Q нелинейного статического звена унимодальна Q--ct(X-X) с минимумом при X X , причем при оС 0при X X. Коэффициенты а и t) могут принимать априорно неизвестные и меняющиеся в процессе работы значения произвольной комбинации знаков, т.е. объект может быть как устойчивым ( а О, -Ь О) так и неустойчивым (один из коэффициентов 0(Ъ или оба одновременно меньше нуля). При схватывании объекта жесткой обратной связью с коэффициентом усиления движение его, как это следует из (1)-(2), описывается уравнением (b-/3)(x + x)o 1 При ограниченном значении Oil всегда можно выбрать/t/iltI . Тогда независимо от комбинации знаков коэффициентов си и 1 фазовые траектории уравне ния {3) будут иметь вид спиралей или гипербол с общим смещением в сторону Xw Фазовое пространство объекта, управляэмог по предлагаемому способу, состоит из crrb рех листов, частично наложенных друг на друга областями К На листах 1,111 |Ь О, фазовая точка здесь движется по спиралям (или по эллипсам при 0 0 ), на листах II, IV, где f) Q , - по кривым гиперболического типа. Листы I и II, а также соответственно III и IV склеены по прямой м. так как при переходе фазовой точ кой через эту прямую оС. изменяет свой знак. Очевидно, что при такой структуре фазового пространства фазовая точка из лю бых начальных условий придет на ось X. Момент прохождения через ось X, когда Y изменяет свой знак, фиксируют и выдают сигнал па изменение знака обратной свя зи с задержкой на интервал времени Т. При таком способе регулирования фазовая точка движется по последовательно чередую щимся участкам спиралей и кривых гипербо лического типа, расположенных между прямыми переключений L и Lo (или L -.iл. L Л в среднем сдвигаясь в сторону экст ремума ( м, ) Области наложения листов К обусловлены запаздыванием при изменении знака обратной связи. В эти области фазовая точка попадает после обраще ния в нуль координаты V, В области мини- 5 мума ооразуетс : у цикл, KOTOpbiK ИПИ О). ется в устойчивую .очк;-;При регулиродаи;: объек 6 не но лрезыщать нс;)а гсорого K;V сского знечения ,опредспяо 01о :jr, r;;o v:H Cs. t), и ,; как 4p:t J|, ,, Процесс поиска CTannj-i fvcH .; Т J uvy, Нижняя граница диапазон; (;иредслЯ ется допустимым ;.1кк::{мапьн:1 ЗБачекиом скорости поиска и максималь;:;о возможным значением частоты ггоисяовкх колебаний. Очевидно, что при ; l iнньшeкии о частота поисковых ко,11с6а-;:н м .:/--,ji, j-aK р;ак углы наклона прямых :1:(ооякл:(о уменьщается. Teci;;;; сл1чае при Т О ::ii:;:; jBLix колебаний равна бс-схои: серость по- иска - нулю, npii П1 П чЛИИЛТи f способа ла ,:;v t, щих элементах ):; диапазоне Г cjip: этих. эле-ментоЕ: г-;-:-; Чу DC TTiT- J г- v; ;; зание этими з;.к.п,.1лм НЫМ Д1Ш Г)0(.;|-Л-,- и.|. споссг),. с . . . Heyi;;TO;iч; .,- .у,- -. --. -:,; Ki.ю.ie того, о-: ;:,;;..: ТОЙЧИВОСТЬ по ср.. i-i, :,-;..;; собом, так как ynpai3j;.ftjii го порядка Б8део:С ис с :водной выхода лккейного зза;;;:;, знаку второй производной выход Формул а и 3 о б р е т е н и я Способ экстремального регулт-фозания объектов с линейным динамическим звеном второго порядка и нелинейным стэллетеским: звеном, основанный на фиксации момента прохождения через нуль производной выходного сигнала линейного звена и формировании управляющего сигнала, о т я и ч а ю. , щ и и с я тем, что, с целью повыщения помехоустойчивости, в момент прохождения через нуль сигнала с первой производной выхода линейного звена формирзют сигнал на изменение знаха обратной связи и задерживают его на интервал времени, олределя-
емый условием устойчивости и реальными характеристиками переключающих элементов. Источники информации, принятые во внимание при экспертизе изобретения: 1. Растригин Л. А. Системы экстремального управления. Наука, 1974.
2.Фицнер Л. Н. Системы управления с ODратной связи по смещению. В сб. Методы оптимизации автомат1гч есхих систем . Энео гия 1972.
3.Авт. свид. СССР № 184317, М.кл. кл. G-О5 t 15/02, 1958 (поототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ экстремального управления объектами с линейным динамическим звеном второго порядка и нелинейным статическим звеном | 1976 |
|
SU640256A1 |
| Устройство для управления экстремальным объектом с неустойчивой линейной частью | 1980 |
|
SU901995A1 |
| Релейная следящая система | 1986 |
|
SU1399696A1 |
| Система экстремального управления | 1988 |
|
SU1550474A1 |
| Устройство для автоматической настройки катушки индуктивности с подмагничиванием | 1978 |
|
SU771795A1 |
| Система автоматического управления | 1982 |
|
SU1113780A2 |
| Система экстремального регулирования | 1989 |
|
SU1640673A1 |
| Устройство для оптимального управления работой инерционного объекта с присоединенным упругим элементом | 1985 |
|
SU1381445A1 |
| Устройство для регулирования колебаний виброплощадки | 1981 |
|
SU987597A1 |
| Способ автоматического управления в системе с люфтом | 1975 |
|
SU728111A1 |
