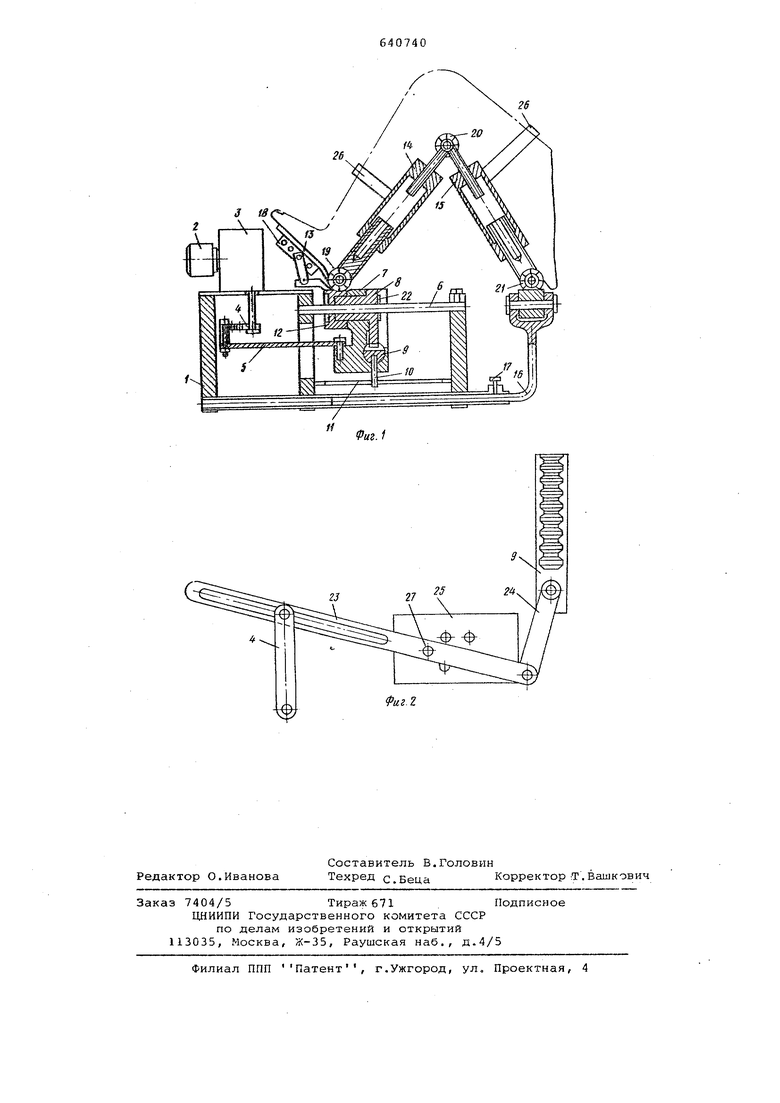
3 15 и 16, последняя из которых фиксиру ется винтом 17. Для замера угловых перемещений в суставах имеются, угломеры 19, - 22. Для поперечных качаний конечности бол ного имеется кулиса 23, тяга 24 и планка 25 с отверстиями для регулиров ки величины угла качания конечности больного. Конечность больного крепитс к тяггия 14 и 15 при помощи ремней 26. Разработка подвижности суставов нижних конечностей может Й оизводиться в трех режимах. Режим 1 (сгибание и разги.бание конечности). Продольное перемадение каретки и продольное качание связанных с ней тяг на закрепляется конечность больного без поперечных качаний. Этот режим осуществляется путем установки сменного шаблона 11 с пазом, ось кото$юго параллельна направлению движения каретки 7. Затем устанавливают длину тяг 14 и 15 в соответ ствии с данной конечностью больного, выбирают необходимую длину кривошипа 4 в зависимости от нужных угловых пе ремещений в суставах, устанавливают при помощи детали 18 необходимый, eaj клон педали-опоры 13. Вьедвигая теяескопйческую тягу 16 из рамы-основани 1, устанавливают необходимьлй диапазон угловш перемедченяй, а зат&л включают электродвигатель. Режим 2 (отведение и приведе ние конечности). Поперечное качание тяг с установленной на них конечностью больного Этот режим осуществляется путем снятия шатуна 5 и сменного шаблона 11 и заменой их кулисой 23, которая сое диняется с крнвсЯ1Шпс 1 4 и шарнирно связана с тягой 24, которая тоже через шарнир соединена с рейкой 9. При вращении кривошипа 4 кулиса 23, кача ясь вокруг выбранного центра 27,, перет ещает рейку § в поперечйом напр лении. Рейка 9, перемещаясь, качает тяги 14 и 15. jESo включения электродвигателя необходимо установить длину тяг 14 и 15 в соответствии с длиной конечиости больного, выбрать направления и место качания конечности больного, меняя положение центра 27 качания кулисы 23 на планке 25. 0 3 (совмещение сгибания Режим и разгибания, отведение и приведение конечности ). Этот режим осуществляется путем установки сменного шаблона 11 с пазом, ось которого наклонена под необходимым углом к направлени1р движения каретки. Соответственно выбирают длину тяг 14,15, длину кривошипа 4 и, выдвигая телескопическую тягу 16 из станины 1, устанавливают необходимый диапазон угловых перемещений, а затем включают электродвигатель. Таким образом устройство для разработки подвижности в суставах нижних конечностей обладает широким диапазореад регулирования скоростей качани о всех возможных направлениях, позволяет осуществить одновременно сгибание и разгибание, отведение и приведение конечности. Формула изобретения 1.Устройство для разработки подвижности в суставах нижних конечностей, содержащее станину, привод с реверсивным электродвигателем и коробкой передач, кривощипно-шатунный механизм с регулируемой длиной кривошипа и механизм воздействия на конечность, отличающееся тем, что, с целью комбинированной разработки одновременно нескольких суставов в двух плоскостях, механизм воздействия на конечность выполнен в виде кронштейна и направлявадих, установленных на станине, каретки, соединенной с кривошипно-шатунным механиэмотл и подвижно размещенной на направляющих, зубчатого сектора и рейки со штырем, расположенных в каретке сменного шаблона с пазами, и двух телескопических тяг с педалью-опорой, шарнирно-соединенных между собой, а также с зубчатым сектором и кронштейном, причем штырь рейкк расположен в пазу шаблона, а шаблон закреплен на основании. 2.Устройство по п.1, отличающее с я тем,что, с целью регулирования величины угла качания конечности, механизм воздействия на конечность снабжен кулисой и тягой, связанной с рейкой. Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство СССР № 371935, кл. А 61 F 5/04, 1973.
26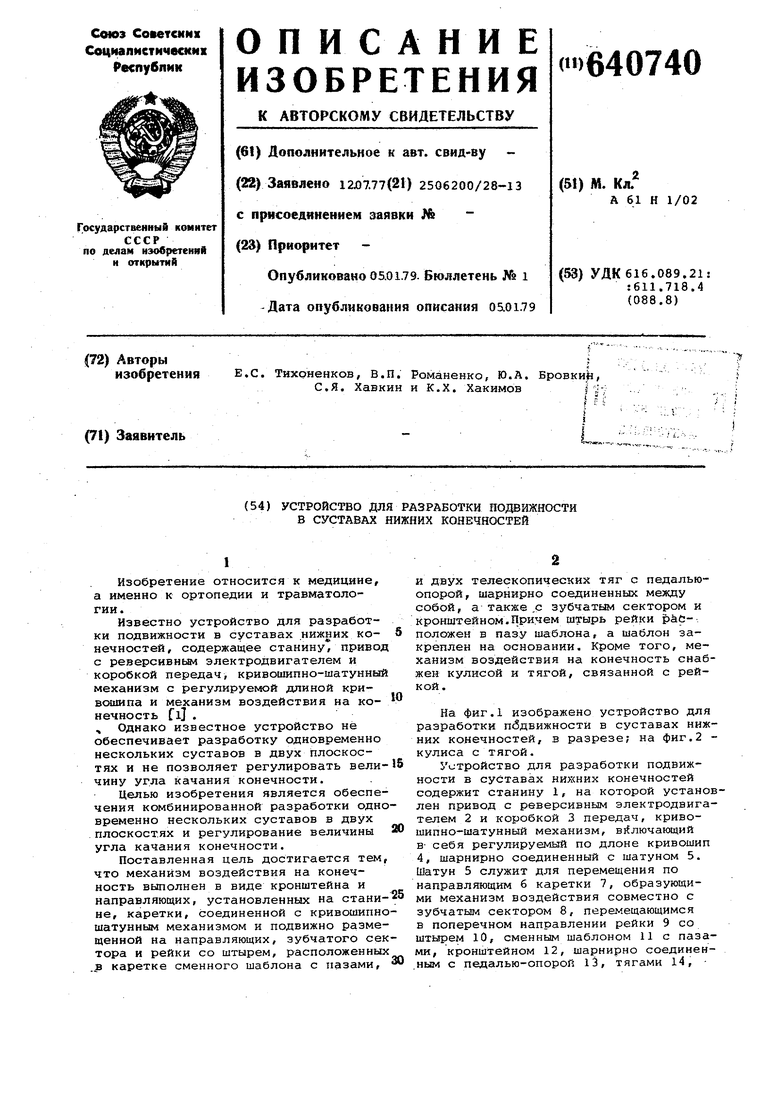

| название | год | авторы | номер документа |
|---|---|---|---|
| Электромеханическое устройство дляРАзРАбОТКи СуСТАВОВ НижНиХ КОНЕчНОСТЕй | 1979 |
|
SU848027A1 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ РАБОТОСПОСОБНОСТИ КОЛЕННОГО СУСТАВА | 2000 |
|
RU2195912C2 |
| Устройство для разработки контрактур суставов пальцев рук | 1990 |
|
SU1727830A1 |
| Станок для двусторонней гибки труб | 1984 |
|
SU1292868A1 |
| ШИНА ДЛЯ ЛЕЧЕНИЯ ПЕРЕЛОМОВ | 2005 |
|
RU2290902C1 |
| УСТРОЙСТВО ДЛЯ РАЗРАБОТКИ ДВИЖЕНИЙ В ТАЗОБЕДРЕННОМ СУСТАВЕ У ДЕТЕЙ | 2000 |
|
RU2191564C2 |
| Устройство для разработки движений в суставах конечностей | 1985 |
|
SU1297855A1 |
| Механотерапевтическое устройство для разработки подвижности голеностопных суставов | 2017 |
|
RU2658760C1 |
| Устройство для разработки суставов конечностей | 1985 |
|
SU1243725A1 |
| АППАРАТ ДЛЯ ВОССТАНОВЛЕНИЯ ПОДВИЖНОСТИ КОЛЕННОГО И ТАЗОБЕДРЕННОГО СУСТАВОВ ЧЕЛОВЕКА | 2005 |
|
RU2307638C2 |