1
Изобретение относится к трубоги- бочному производству и может быть использовано в различных отраслях .промышленности.
Целью изобретения является повышение производительности станка.
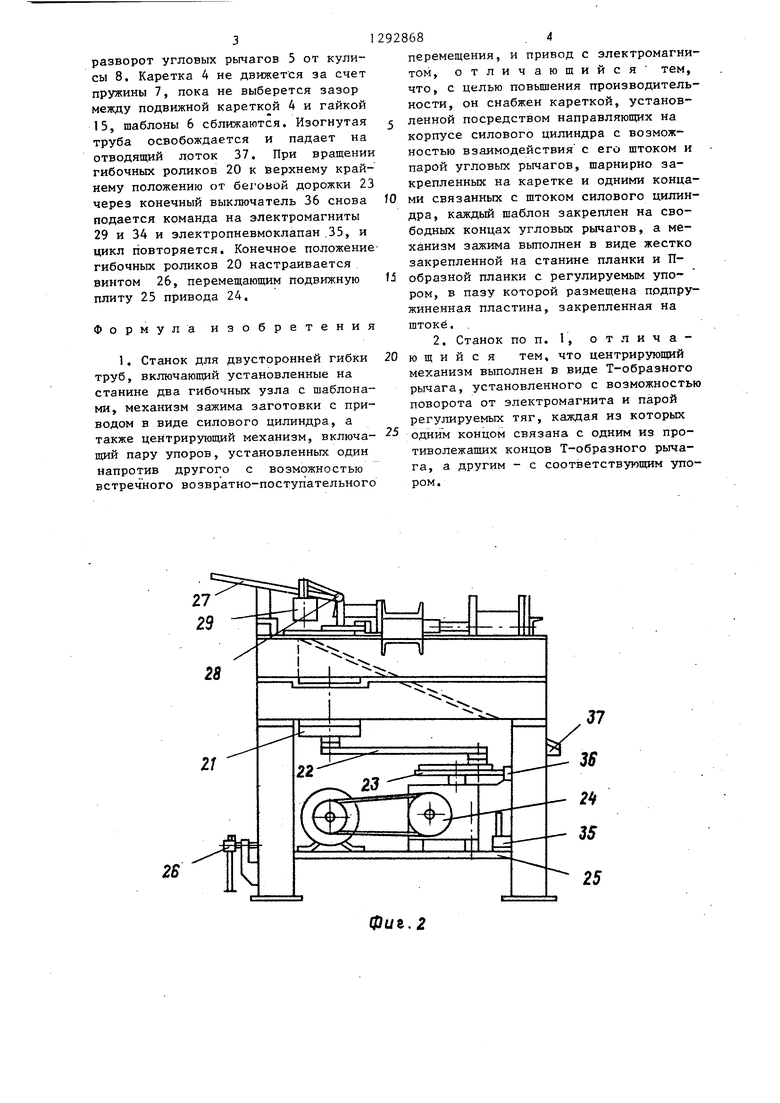
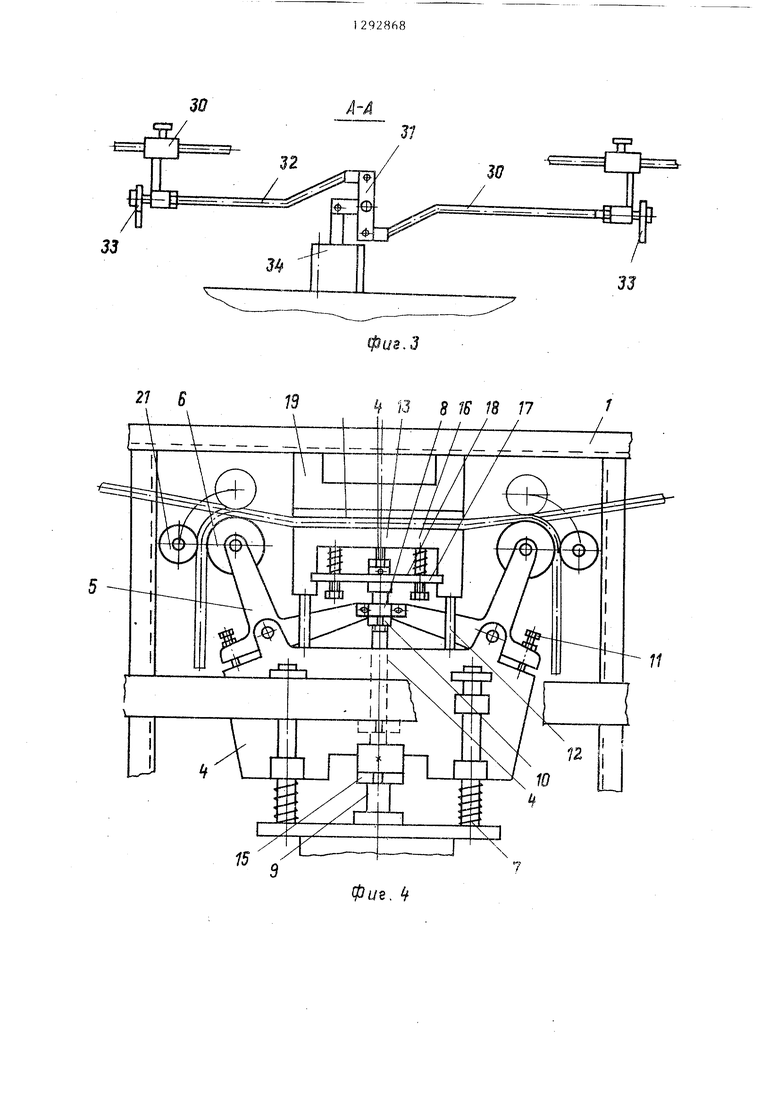
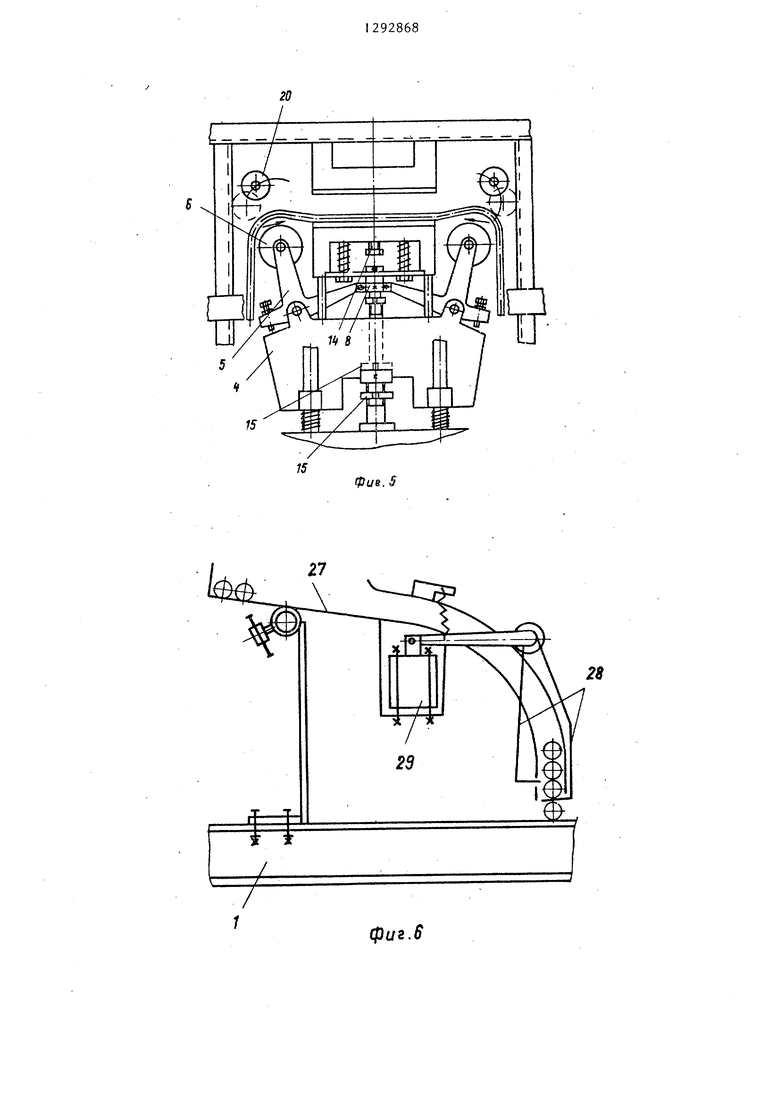
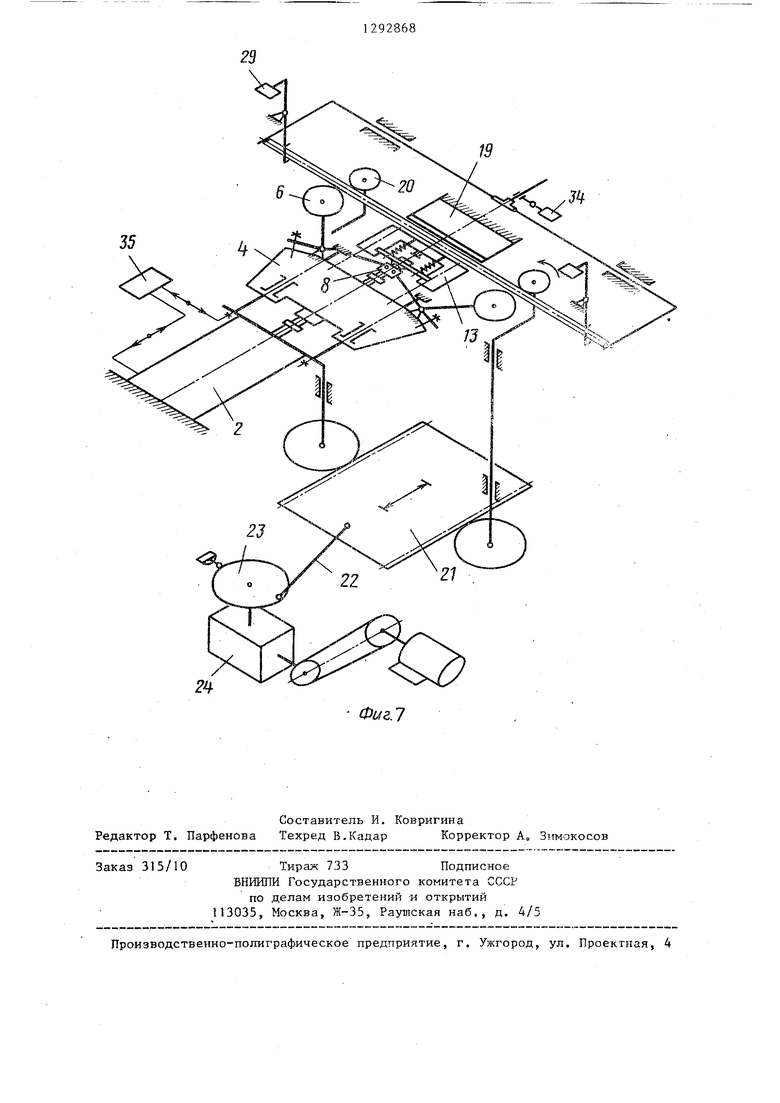
На фиг. 1 изображен предлагаемый станок, вид сверху; на фиг. 2 - то же, вид сбоку; на фиг. 3 - сечение А-А на фиг. 1; на фиг. 4 - узел зажима заготовок и подвижная каретка при зажатой трубе в конце гиба; на фиг. 5 - сброс трубы в начале гиба; на фиг, 6 - разгрузочное устройство и отсекатель; на фиг, 7 - кинематическая схема устройства.
Станок для двусторонней гибки труб содержит станину 1, на которой закреплен пневмоцилиндр 2, на направляющих 3 которого перемещается механизм каретки 4, на которой шарнир- но закрепляются угловые рычаги 5, имеющие гибочные шаблоны в форме роликов 6. На направляющих 3 установлены пружины 7.
Угловые рычаги 5 через кулису 8 соединены со штоком 9 пневмоцилиндра 2 и регулируются гайкой 10, Настройка и фиксация рычагов 5 производятся болтами 11. Подвижная каретка 4 несет механизм 12 зазкима заготовок, вьшолненный из П-образной планки 13 с регулируемым упором 14 и через гайку 15 опирается на шток пневмоцилиндра 2. П-образная планка 13 через пружины 16, регулируемые винтами 17., опирается.на подпружиненную пластину 18, закрепленную на штоке пневмоцилиндра . Планка 19. крепится к станине Гибочные ролики 20 через рейку 21 и кривопшпно-шатунный механизм 22, имеющий беговую дорожку на кривошипе 23 сбкатьтаются вокруг шаблонов 6. Привод 24 установлен на подвижной плите 25, которая перемещается винтом 26.
Регулируемое загрузочное устройст во 27 имеет отсекатели 28, работающие от электромаг.иитов 29. Механизм центрирования заготовок 30 состоит из Т-образного рычага 31 регулируемых тяг 32 с упорами 33 и работает от электромагнита 34. Работа электро магнитов 29 и 34 и электропневмокла- пана 35, управляемого пневмоцилинд- ром, задается беговой дорожкой кривошипа 23 через конечный выключатель 36, Отвод согнутой трубы осуществляется лотком 37.
1292868/ 2
Станок работает следующим образом. От беговой дорожки кривошипа 23 через конечный выключатель 36 подается команда на электромагниты 29,
5 которые включают отсекатели 28, и заготовка из загрузочного устройства 27 подается в механизм центрирования заготовки 30, электромагнит 34 которого включается от конечного выключателя 36. Электромагнит 34 поворачивает Т-образный рычаг 31, которьй через регулируемые тяги 32 тянет подвижные упоры 33 к центру станка, которые выставляют заготовку симметрично относительно гибочных шаблонов 6 Одновременно от конечного выключателя 36 подается команда на электропневмоклапан 36, который подает сжатый воздух в пневмоцилиндр 2, и шток 9 пневмоцилиндра перемещает каретку 4 в направлении гибочных роликов 20. Причем, ось подвижных гибочных шаблонов 6 совпадает с ценjc тром движения гибочных роликов 20, От кулисы 8, установленной на штоке 9 пневмоцилиндра, расходятся угловые рычаги 5 5 отрегулированные гайкой 10 и болтами 1I. Происходит подача ка-
15
20
30
35
40
45
50
55
ретки 4 через гайку 15, установленную на штоке пневмоцилиндра 2, и зажатие трубы. Симметрично выставленная труба-заготовка зажимается между планкой 19, закрепленной на станине,и П-образной планкой 13. Пластина 18, закрепленная на штоке пневмоцилиндра 2, упирается в регулируемый упор 14. Гибочные ролики 20 в это время находятся в верхнем крайнем положении и начинают через рейку 21:, связанную с кривошипно-шатунным механизмом 22, обкатываться вокруг гибочных шаблонов 6, Когда достигнута необходимая геометрия гиба трубы (фиг. 4), гибочные ролики 20 возвращаются в исходное положение.
В это время от беговой дорожки кривошипа 23 через конечный выключатель 36 подается команда на электромагниты 29, которые возвращают отсекатели 28 в исходное положение, электромагнит 34, возвращаюш11Й в исходное положение механизм центрирования заготовки 30, и на электропневмоклапан 35, который переключает пневмоцилиндр 2, и шток пневмоцилиндра 9 отводит механизм зажима в исходное положение. При ходе штока 9 в исходное положение (фиг. 5) происходит
ретки 4 через гайку 15, установленную на штоке пневмоцилиндра 2, и зажатие трубы. Симметрично выставленная труба-заготовка зажимается между планкой 19, закрепленной на станине,и П-образной планкой 13. Пластина 18, закрепленная на штоке пневмоцилиндра 2, упирается в регулируемый упор 14. Гибочные ролики 20 в это время находятся в верхнем крайнем положении и начинают через рейку 21:, связанную с кривошипно-шатунным механизмом 22, обкатываться вокруг гибочных шаблонов 6, Когда достигнута необходимая геометрия гиба трубы (фиг. 4), гибочные ролики 20 возвращаются в исходное положение.
В это время от беговой дорожки кривошипа 23 через конечный выключатель 36 подается команда на электромагниты 29, которые возвращают отсекатели 28 в исходное положение, электромагнит 34, возвращаюш11Й в исходное положение механизм центрирования заготовки 30, и на электропневмоклапан 35, который переключает пневмоцилиндр 2, и шток пневмоцилиндра 9 отводит механизм зажима в исходное положение. При ходе штока 9 в исходное положение (фиг. 5) происходит
31
разворот угловых рычагов 5 от кулисы 8. Каретка 4 не движется за счет пружины 7, пока не выберется зазор между подвижной кареткой 4 и гайкой 15, шаблоны 6 сближаются. Изогнутая труба освобождается и падает на отводящий лоток 37. При вращении гибочных роликов 20 к верхнему крайнему положению от беговой дорожки 23 через конечный выключатель 36 снова подается команда на электромагниты 29 и 34 и электропневмоклапан .35, и цикл повторяется. Конечное положение гибочных роликов 20 настраивается винтом 26, перемещающим подвижную плиту 25 привода 24.
Формула
изобретения
1. Станок для двусторонней гибки труб, включающий установленные на станине два гибочных узла с шаблонами, механизм зажима заготовки с приводом в виде силового цилиндра, а также центрирующий механизм, включа- щий пару упоров, установленных один напротив другого с возможностью встречного возвратно-поступательного
O
92868. 4
перемещения, и привод с электромагнитом, отличающийся тем, что, с целью повьщ1ения производительности, он снабжен кареткой, установ- 5 ленной посредством направляющих на корпусе силового цилиндра с возможностью взаимодействия с его штоком и парой угловых рычагов, шарнирно закрепленных на каретке и одними концами связанных с штоком силового цилиндра, каждый шаблон закреплен на свободных концах угловых рычагов, а механизм зажима вьшолнен в виде жестко закрепленной на станине планки и П- образной планки с регулируемым упором, в пазу которой размещена подпружиненная пластина, закрепленная на штоке.
2. Станок по п. Г, отличающийся тем, что центрирующий механизм выполнен в виде Т-образного рычага, установленного с возможностью поворота от электромагнита и парой регулируемых тяг, каждая из которых одним концом связана с одним из противолежащих концов Т-образного рычага, а другим - с соответствующим упором.
0
5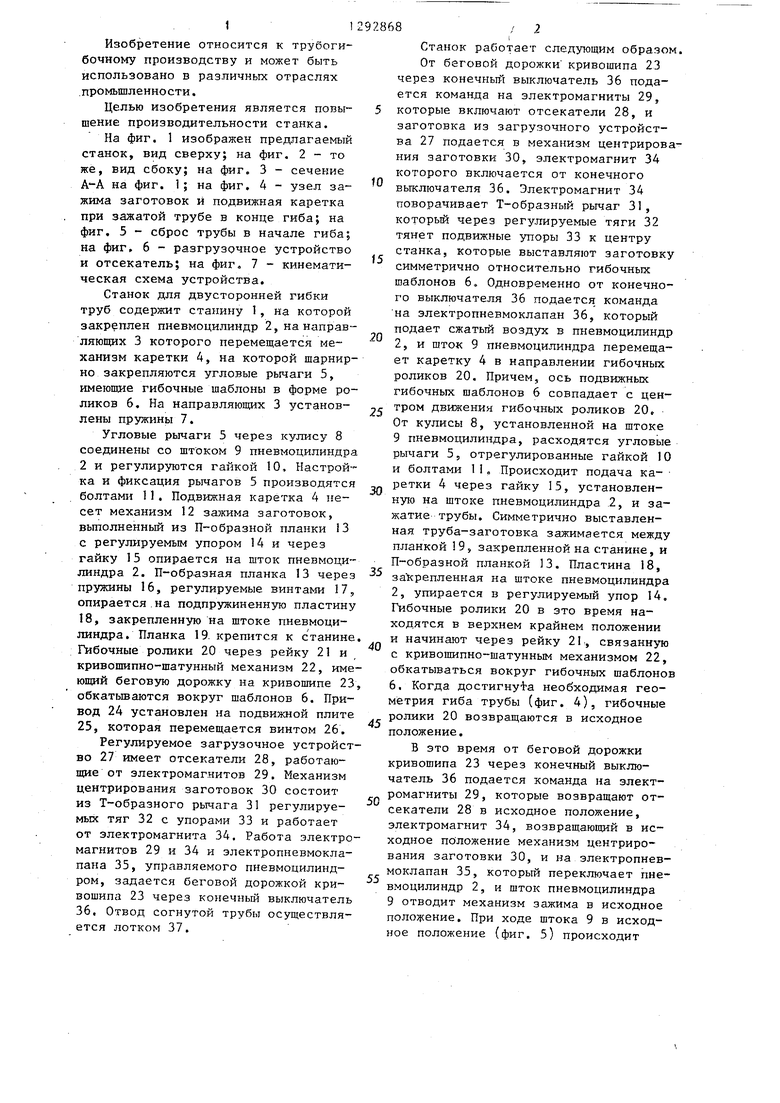
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ГИБКИ ЗМЕЕВИКОВ | 1971 |
|
SU411941A1 |
| Трубогибочный станок | 1984 |
|
SU1378982A1 |
| Станок для пространственной гибки труб | 1989 |
|
SU1609530A1 |
| Трубогибочный станок | 1979 |
|
SU837471A1 |
| УСТРОЙСТВО ДЛЯ ДВУХСТОРОННЕЙ ГИБКИ ТРУБ В ДВУХ ПЛОСКОСТЯХ | 2005 |
|
RU2292974C2 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ИЗОГНУТЫХ ТРУБ | 2016 |
|
RU2622197C1 |
| ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1996 |
|
RU2101115C1 |
| Трубогибочная машина | 1973 |
|
SU467556A1 |
| Устройство для многоколенной гибки труб | 1990 |
|
SU1734907A1 |
| Трубогибочный автомат | 1986 |
|
SU1526871A1 |
Изобретение относится к трубо- гибочному производству. Изобретение позволяет повысить производительность станка за счет установки механизма удаления и механизма зажима от одного привода. Станок снабжен подвижной кареткой 4, связанной со штоком пневмоцилиндра 9, на которой шарнир- но закреплены угловые рычаги 5 с шаблонами-роликами 6. Механизм зажима вьшолнен в виде Двух планок 19 и 13 и подпружиненной пластины 18. Механизм центрирования выполнен в виде Т-образного рычага и регулируемых тяг с упорами. Из загрузочного устройства трубная заготовка подается в центрирующий механизм, затем на каретку, при помощи которой осуществляется зажим, гибка и удаление трубы. 7 ил. (g J (Л ТА Y . 724. 2J 1 to о ю 00 О5 СХ5 us.1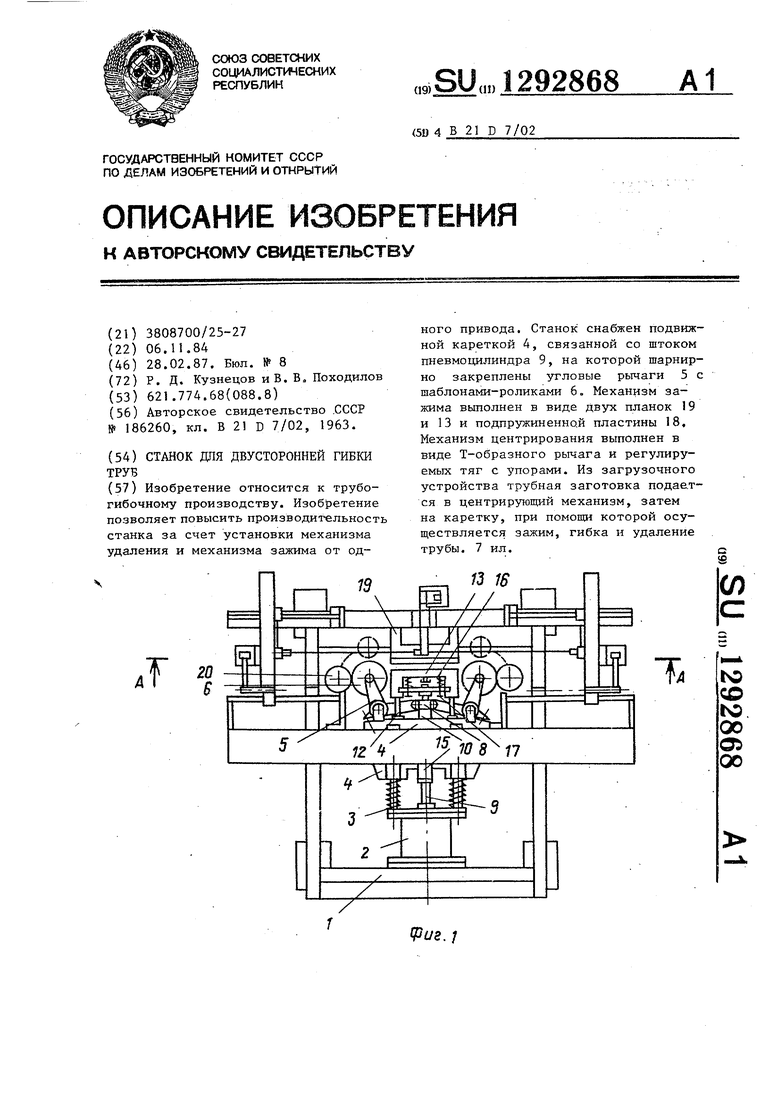
2S
фиг,2
30
32
33
j
J/7
/
Of
33
21 6
i3 8 16 18 17
I / /
dL/-l--JФи.
15
Фив. S
27
фиг.6
55
19
J
Фиг.7
Составитель И. Ковригина Редактор Т, Парфенова Техред В.Кадар Корректор А„ Зимокосов
315/10
Тирак 733Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений -и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| СТАНОК ДЛЯ ДВУСТОРОННЕЙ ГИБКИ ТРУБ | 0 |
|
SU186260A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
