1
Изобретение относится к области систем автоматического регулирования положения плавучих объектов и может найти применение на плавучих буровых установках и т. п.
Известна система автоматичес1.ого регулирования положения плавучих объектов, в которой применено регулирование с жесткой структурой {I. .
Ближайшим по технической сущности является устройство для регулирования положения плавучих объектов, содержащее три параллельные цепи, каждая из которых состоит нз последовательно соединенных датчика рассогласования параметра и регулятора, два блока коррекции, первые входы которых, подключены соответственно к выходам первого и третьего регуляторов, а вторые - к выходу второго регулятора, и исполнительные механизмы 2.
При регулировании положения объектов с помощью известных устройств, вследствие инерционности объектов упраиления. неизбежно возникает колебательность переходных процессов, что приводит к понижению точности и ухудй1ению качества регулирования.
Целью изобретения является повышение точности устройства. Эта цель достигается тем, чтЬ устройство содержит две параллельные цепи, каждая из которых состоит из последовательно соединенных сумматора, дифференциатора, логического блока и ключа, второй вход которого соединен с выходом соответствующего блока коррекции, а выходы - с соответствующими исполнительными механизмами, причем вторые входы логических блоков соединены с выходами соответствующих сумматоров, выход второго датчика рассогласования параметра соединен -с первыми входами сумматоров, вторые входы которых соединены соответственно с выходами первого и третьего датчиков рассогласования параметра.
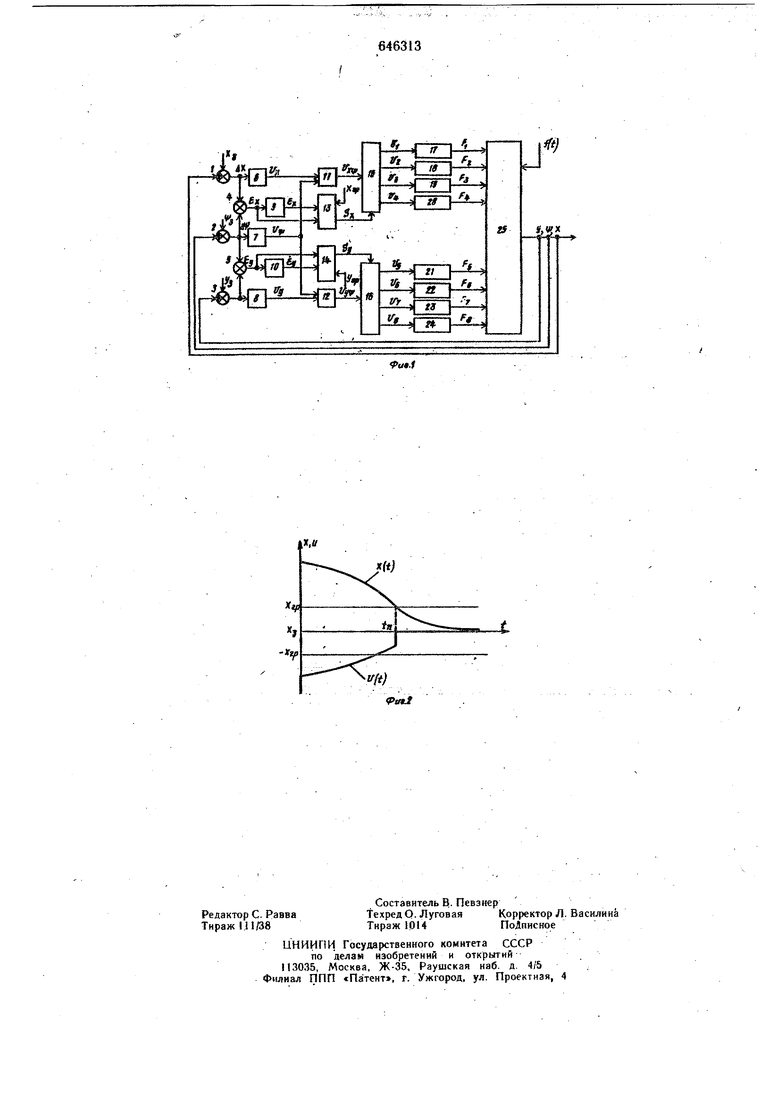
На фиг. 1 приведена структурная схема устройства; на фиг. 2 - переходный регулирования выходного параметра x(t) объекта и регулирующего сигнала и, u(t).
Устройство содержит датчики рассогласования параметра I, 2. 3, сумматоры 4, 5, регуляторы 6, 7, 8, дифференциаторы 9, 10, блоки коррекции 11, 12, логические блоки 13, 14, ключи 15, 16, Исполнительные механизмы 17. 18, 19, 20, 21, 22, 23, 24, объект регулирования 25. X, У, и Ф - регулируемые параметры (перемещения по осям X, Y и курс относительно оси Х); Хз, YJ и РЗ - заданные значения регулируемь1х параметров; Хгр.. и Yrp . - задаваемые граничные зйачения регулируемых параметров; АХ, А У и АФ - сигналы рассогласования регулируемых параметров; вк и |j - выходное сигналы сумматоров 4, 5; сх и су -- выходйые сигналы дифференциаторов 9, IO;Ux,::l и U выхрдйые сигналы регуляторов 6, 7, 8; U и IJw ,.гг выходные сигналы блоков ксгррёкции П, 12; S и S г- выхоДйые сигналы логических блоков 13, 14; U -r-Ue - регулирующие сигналы; FI -Fe - регулирующие воздействия на (ъект регулирования 25 и 1(1) - всймущающее воздейстаие. Устройство работает следующим образом.- ;. : ..-. . г . . ; ;; Пусть на объект .25 подеЙ1Ствовалр возмущение (t) (ветер, волна, течение и пр.), в результате чего на выходе датчиков -3 образуются сИгналь рйссоггласоваиня А X, А У и Аф, а на выходе сумматоров 4 и 5 сигналы АИ. Далее, в зависимости от сигналов рассогласования на йыходе регуляторов 6-8, сЬзда1бт :я сигиалы U, И и Lfft, а в зависимости от сигналов Ц и ч йа выходе .дифференциаторов 9 и 10 сиГиала , йб,; На блоках коррекции 11 и 12 получаются сигналы U, и УлФ, кotopыe подаются йЬ входу ключей 15 и 16, управляемых выходными сигналами логических блоков 13 и 14, где выполняются операции (Гпри €,0,jfe,0, 1при , , 0. Эпри €, Хгр,6х О, /I При 0, .,0, Vil при е, У1 , 0(2) Юпри е, Угр, fc о. Регулирующие сигналы Ц -Ц подаваемые ко входам исполнительных механизИОВ 17-24 создакэтгся в виде ЛА (-1) SK- и,, ,при i 1,2,3,4, (3) Uj (-1Г S,- и,., при j 5,6,7,8. (4) Переходный процесс регулирования выходного параметра x(t) объекта 25 и регулирующего сигнала и U (t) приведены на фиг. 2. Как видно из фиг. 2, при дости-. жении регулируемым параметром задаваемой границы положения (Хгр.} происходит переключение структуры устройства по выбранному логическому алгоритму, вследствие чего регулирующие сигналы не поступают на исполнительные механизмы 17-20 в момент переключения tn и система предоставляется самой себе, тем самым достигается апериодичность переходиого процесса. ., Это приводит к улучшению качества регулирования и повышению точности устройства. Кроме того, экономится энергия, потребляемая исполнительными механизмами. Формула изобретения Устройство для регулирования положения плавучих объектов, содержащее три параллельные цепи, каждая из которых с6с--ч тоИт из последовательно соединенных датчика рассогласования параметра и регулятора, два блока коррекции, первые входы которых подключены соответственно к выходам первЬго и третьего регуляторов, а вторые - к выходу второго регулятора, и исполнительные механизмы, отличающееся т&м что, с целью повышения точности устройства,, оно содержит две параллельные цепи, каждая из которых состоит из последовательно соединенных сумматора, дифференциатора. логического блока и ключа, второй вход которого соединен с выходом соответствующего блока 1{рррекции, а выходы- с соответствующими исполнительными механизмами, причем вторые входы логических блоков соединены с выходами сбответствующих сумматоров, выход втдрого датчика рассогласования параметра соединен с первыми вхо Дами сумматоров, вторые входы которых соединены соответственно с выходами перво го и третьего датчиков рассогласования параметра. Источники информации, принятые во внимание при экспертизе 1. Патент США К 3211121, кл. 114-144, 1971.. 2. Патент США № 3422783, кл. 114-144, 1973..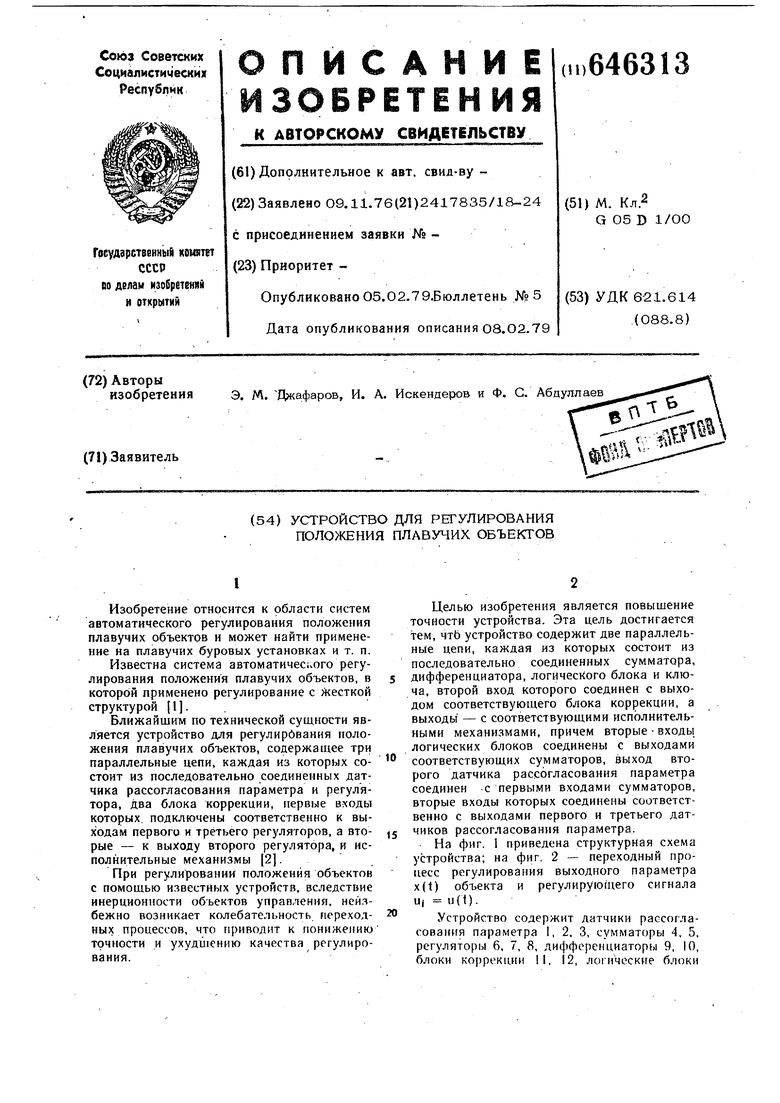
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство с размытой логической самоорганизацией для автоматического управления объектом,например ректификационной колонной | 1986 |
|
SU1434402A1 |
| Пневматический адаптивный регулятор с переменной структурой | 1983 |
|
SU1285429A1 |
| Пневматический регулятор | 1978 |
|
SU752229A1 |
| Адаптивный регулятор | 1977 |
|
SU746414A1 |
| Система адаптивного управления процессом гранулирования комбикормов | 1987 |
|
SU1531956A1 |
| Система автоматического управления измельчительным комплексом | 1983 |
|
SU1134237A1 |
| Адаптивный регулятор с регулируемой обратной связью | 1985 |
|
SU1287104A1 |
| Пневматическое управляющее устройство для регулирования температуры и уровня куба ректификационной колонны | 1978 |
|
SU752243A1 |
| Самонастраивающаяся система комбинированного регулирования | 1985 |
|
SU1254433A1 |
| Система управления технологическим процессом | 1985 |
|
SU1403014A1 |