(54) СИСТЕМА АВТОМАтаЧЕСКОЮ -УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1983 |
|
SU1105858A1 |
| Адаптивная система управления потенциально опасным объектом | 1987 |
|
SU1513416A1 |
| Дфухканальная следящая система | 1980 |
|
SU954923A2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| Система автоматического управления | 1973 |
|
SU467321A1 |
| Самонастраивающаяся система комбинированного регулирования | 1987 |
|
SU1509828A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| Следящая система | 1980 |
|
SU885970A1 |
- . 1,
Предлагаемая система относится к системам автоматического управленияи может быть использована для управления объектами различного назначения. .. Известны системь автоматического управления, содержащие измеритель рассогласования е л - у между входным воздействием х и выходным сиг наяом объекта у , датчик скорости и последовательно соединенные блок формирования сигнала управления и исполнительный механизм, воздействующий на объект i . Особенностью таких систем является то, что входное воздействие X и выходной сигнал объекта у не могут быть непосредственно измерены. Для сглаживания помех в систему вводятся разлияного рода лилейные корректирующие фильтры, обеспечивающие повышение точности системы. Компенсация динамического запаздывания в известных системах осуществляется путем введения сигнала с выхода датчика скорости.
Недостатком таких систем является их низкая точность, поскольку при глубокой фильтрации в линейном корректирующем фильтре происходят значительные амплитудное и фазовое искажения -ВХОДНОГО воздействия, а при малой фильтрации имеют, место значительные флюктуации органа управления объектом.
Известны также системы автоматического управления, содержащие селектор выбора промежуточного по величине сигнала, первый вход которого связан с выходом датчика сигнала непосредственно, а второй вход - черечз корректирующий фильтр, на третий вход селектора подан нулевой сигнал l2l .
Недостатком таких систем ярляется то, что они могут быть использованы только при п.ентрирован1Ш1х сигналах рассогласования.
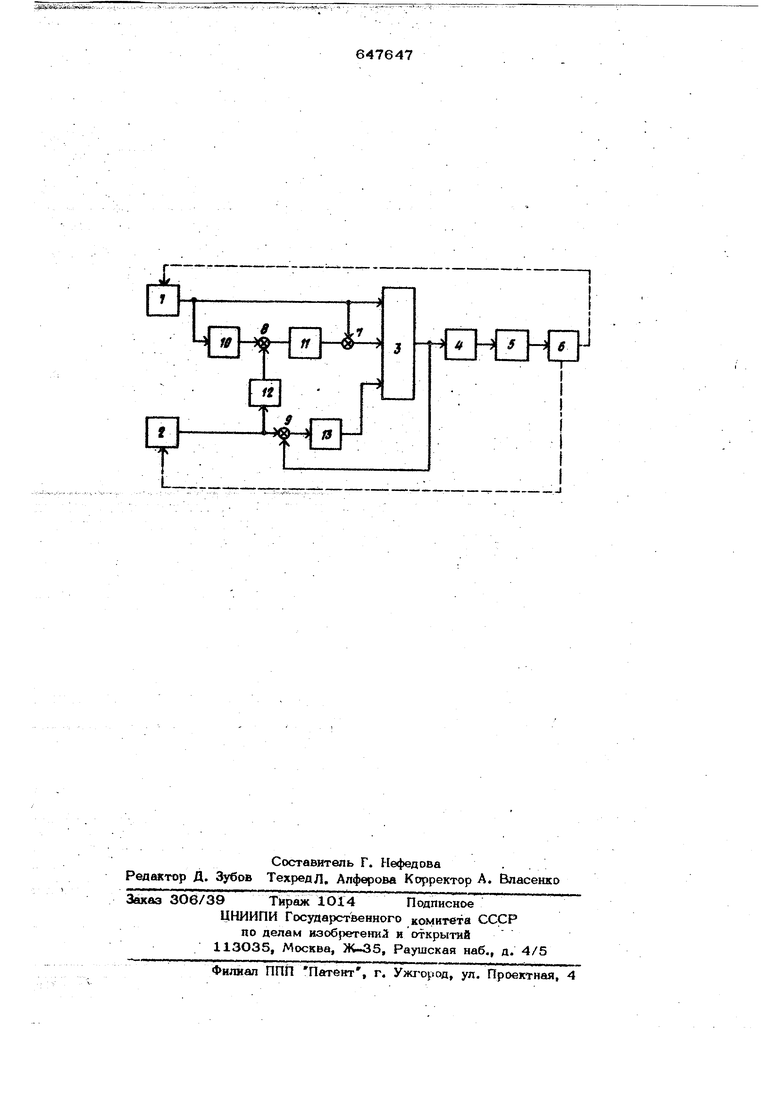
Из известных систем наиболее бдиэ- кой по технической сущности являе1-ся система автоматического управления, содержащая первый корректирующий фильтр« измеритель скорости, измеритель рассоглйсования, выход которого соединен со входом первого дифференциатора, с первым входом селектора и С первым-входом первого сумматора, в рой вход которого соединей с выходомвторрго дифференциатора, а вьосод со вторым входом селектора, третий вход которого соединен с выходом второго корректирующего филмра, а выход - со входим блока,формированиа сигнала управления, выход которого через исполнительный механизм соединён со входом объекта выходы которого соединены со входами измерителя рассогласования и измерителя скорости 1едостатком этой системы является то, что наряду с подавлешем высокочастотной составляющей сигнала рассогласования теряется информация о быстрых изменениях выходного сигнала объекта, а это приводит к Необходимости снижения добротности системы, всле ствие чего понижается ее точность. При этом имеют место значительные флюктуации исполнительного органа при парировании действующих на систему возмущений. Цель изобретения - повыщение точности и быстродействия системьи Поставленная цель достигается тем, Чго в системе установлены два сумматора, причем выход первого дифференциатора соединен с первым входом второго сумматора, второй вход которого 4ejpee первый корректирующий фильтр соединен с выходом измерителя скорости и первым входом третьего с мматора, а выход - со входом i второго дифференциатора, выход селектора соединен со Вторым входом третьего сук;м&тора, выход которого соединен со входом второго корректирующего фнльлрра. Блок-схема системы Представлена на чертеже. В схему включены: измеритель рассогласования 1, измеритель скорости 2, селектор 3, блок формирования сигнала управле1дая 4, исполнител ный механизм 5, объект 6, первый второй и третий сумматоры 7, 8, 9, первый и второй дифференциатбры 10, ll первый и второй корректирующие фильтры 12, 13. Кроме того введены следующие обоз начения: и J - выходной сигнал i -го функционального блока, где i -номер функционального блока, m d -оператор выбора промежуточного по величине сигнала. Селектор 3 в системе предназначен для выбора промежуточного сигнала из сигналови jXT J ХГ15 в текущий момент време1Ш U tn«d(U||TJj lI(j) Система работает следующим образом. В дифференциаторах системы формируются сигналы: IJL и, ииц .P постоянные времени дифференциатора 10и11, Т - коэффициент усиления дифференциатора 11. На второй вход селектора 3 подается сигнал с выхода сумматора 7: iJ,,;, а /7 041 причем -12 Р где l/t.ap + i -передаточная функция первого корректирующего фильтра 12. Задавая постоянную времени корректирующего фильтра 12 равной постоянной времени дифференциатора 1О(,д) получим, что выходной сигнал сумматора 7 связан с выходными сигналами измерителя рассогласования 1 и измерителя скорости 2 следующим соотнощением ((,,,) На третий вход селектора 3 поступает сигнал обратной связи где 1 ,g -постоянная времени второго корректирукмцего фильтра. При прохождении сигнала U на выход селектора 3 имеем 11, х-у При црохожден1га сигнала Ну на выход селектора 3, учитывая то, что Иг У получим Uj IT l{ , где приведенное по второк у входу селектора 3 входное воздействие X Х --1Г оР ИСг ри)
5 При прохождении сигнала ЯГ на выход селектора 3 имеем u,.v,,v,, Это означает, что измеритель рассогласования 1 отключен от блока формирования сигнала рассогласования и не участвует в процессе управления, а приращение выходного сигнала объекта на интер вале времени, когда ч U 2t определяется интегрированием сигнала измерителя скорости 2 Г где Y -const Таким образом, в системе осуществл ется нелинейная фильтрация входного воз действия X , прй которой высокочастотные составляющие входного воздействия подавляются, при этом граница частот определяется коэффициентом усиления Т второго дифференциатора 11 Увеличение постоянных времени дифференцирующих звеньев 10 и 11 нескольк размывает границу интервала фильтрации, что допустимо, поскольку точная граница между спектром полезной и шумовой составляющими входного воздействия X в сигнале измерителя рассогласования 1, как правило, неизвестна. Оценка эффективности предлагаемой системы проведена при моделировании управления самолетом. Измерителем рас согласования служит радиовысотомер, измеряющий расстояние до земной по- верхности: , где X -абсолютная высота рельефа относительно уровня моря, у - высота полета самолета относительно того же уровня. Из меритель скорости фиксировал сигнал, пропорциональный вертикальной скорости самолета. Величинь X И Y непосредственно не измеряются. При моделировании получено, что точность стабилизации вьпие на ЗО-4О% а среднеквадратическое значение от63476 7клонения регулирующего органа (руля высоты) уменьшено на 5О-6О%, по сравне шю с известными системами. Формула изобретения Система автоматического управления содержащая первый корректирующий фильтр, измеритель скорости, измеритель рассогласования, выход которого соединен со входом первого дифференциатора, с первым входом селектора и с первьш входом первого сумматора, второй вход которого соединен с выходом B-foporo дифференциатора, а выход - со вторым входом селектора, третий вход которого соединен с выходом второго корректирующего фильтра, а выход - со входом блока формирования сигнала управления, выход которого через исполнительный механизм соединен со входом объекта, выходы которого соединены со входами измерителя рассогласования и измерителя скорости, отличающаяся тем, что, с целью повьпи©ния точности и быстродействия системы, в ней установлены два сумматора, причем выход первого дифференциатор соединен с первым входом второго сумматора, второй вход которого через первый корректирующий фильтр соединен с выходом измерителя скорости и первым входом третьего сумматора, а выход со входом второго диффере1щиатора, выход селектора соединен со вторым входои третьего сумматора, выход которого соединен со входом второго корректирующего фильтра.. Источники информации, принятые во внимание при экспертизе: 1.КрасовскнЙ А. А. и др. Основь автоматики и технической кибернетики. Госэнергоиздат, 1962, с. . 2.Авторское свидетельство СССР Хо 197721, кл. Q 05 F 1/ОО,. 26.04.66, 3.Автоматика и телемехаш1ка, № 12, 1971, с. 123.
647647
И
ff
ипл
