(54) МАНИПУЛЯТОР К ДОИЛЬНЫМ АППАРАТАМ
Блок управления заключен в вакуумом корпусе.
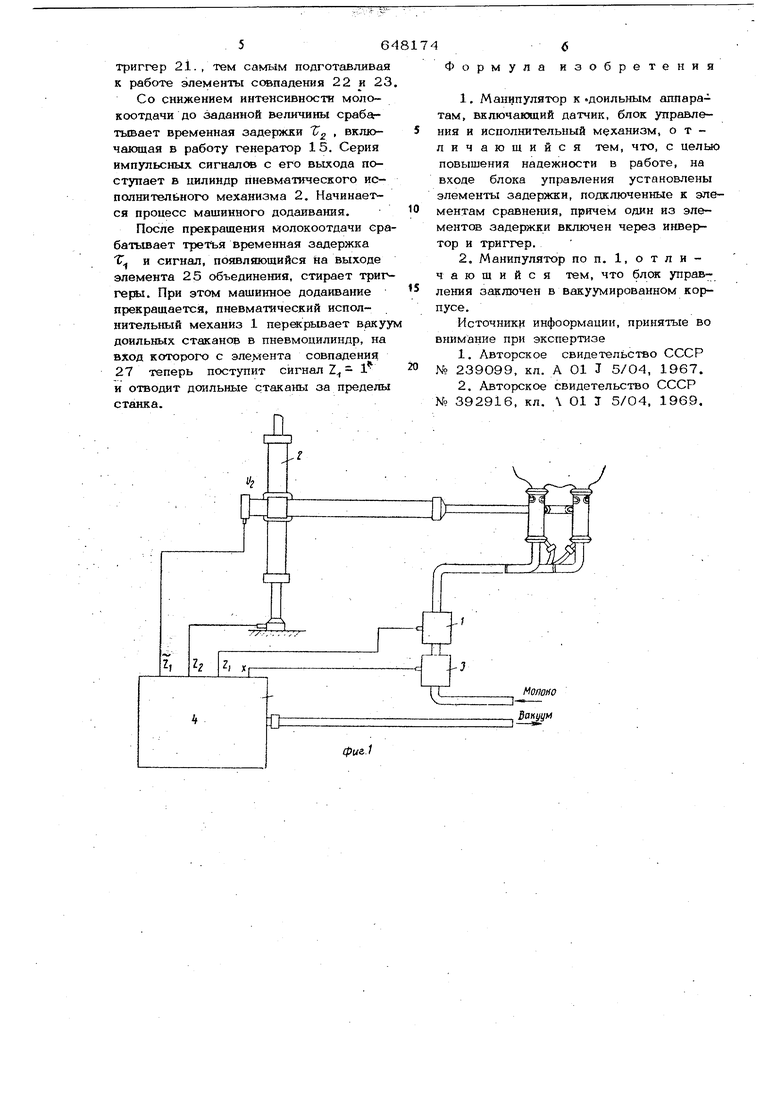
На фиг. 1 изображен предлагаемый анипулятор, общий вид; на фиг. 2 омпоновочная схема блока управления оением; на фиг. 3 - принпипиальная схема блсжа управления доением.
Манипулятор к доильным аппаратам содержит два пневматических исполнительные механизма : 1 - для включения и отключения доильного аппарата; 2 для додаивания и отвода доильных стаканов, пневматический дискретный дат чкк 3 интенсивности молочного потока и пневматический блок управления 4. Блок управления доением содержит пневмоэлементы и струйные модули 5, печатную плату 6, основание 7, корпус 8, коммутационный разъем 9, кнопку пуска Ю, кнопку останова 11, индикаторное устройство 12, вь1ходныетриггеры 13 и 14, генератор импульсов 15 узла 16 с временными задержками 17, 18, 19, инвертором 20, триггером 21 и элементами сравнения 22 н 23, узел выходных сигналов 24, элемент 25 объединения и элемёнтъ совпадения 26 и 27./ -- - .
Пневматический исполнительный .механизм 1 представляет собой пневмокамеру.:
Исполнительный механизм 2 служит аля механического воздействия на доильыё стаканы аппарата. Машинное додаивание производится с помощью пневмо- цилиндра при подаче на него пневматических сигналов с управляющего устройства. Пневмонил; ндр при поступлении на его вход нижнего урсданя перепада давления йыводит доильные стаканы за ; пределы станка.
Датчик 3 интенсивности молочного потока является датчиком дискретного : пневматического сигнала. Пневматический исполнительный механизм 1 и датчик 3 интенсивности молочного потока конструктивно могут быть объединены, Пневмоэлементы и струйные модули 5 блока управления располагаются на печатньос панелях 6 и 7, последняя из которых является оспсеаниём, и закрывается корпусом 8, герметизирующим пространство вокруг пневмоэлементов. Снаружи корпуса размещаются коммутационный разъем (клеммник) 9, кнопка 1О пуска, кнопка 11 останова маниnjTMTOpa и устройства 12 для индикации {гаевмосигналсе.
Выходные триперы 13 и 14 формируют сигналы Z , 2 и 2 . Пневматический генератор 1 5 формирует корот кие сигналы Z, а узел 16, анализирует выходной сигнал X датчика интенсивности молочного потока с помощью управляемых задержек 17, 18, 19, настраиваемых так, что время Т задерокки 17 больше времени Т задержки 18, которое в свою очередь больше времени f задержки 19. Выходной сигнал X задержки 19 инвертируется в инверторе 20 я его выходной сигнал 5 4,, взводит струйный триггер 21 выходной сигнал X g которого поступает на входы элементов совпадения 22 и 23. На эти же элементы, соответственно, поступают сигналы К, с задержек 17 и 18. На выходе элемента 22 образуется сигнал Х . X, и на выходе элемента 23 - сигнал
s, x,-x,.
Триггер 13с выходными сигналами 2 , Z (управляющий включением доильного аппарата), взводится от кнопки 10 по сигналу S , а триггер 14с выходным сигналом 2 взодится по сигналу 3. Стираются триггеры 13 14 и 21 по сигналу Т , который образуется на выходе элемента 25 объединения, на входы которого поступает сигнал от кнопки 11 останова или выходной сигнал Х элемента 22. Сигнал ZT триггера 14 включает на время пока 2 2 i генератор 15, который на выходе выдает серию импульсных сигнало t 2 Генератор 15 имеет органы уп- раадения периодичностью и скважностью пневмосигналов Z«, производящих Додаивание...
Манипулятор работает следующим образом.
При надевании доильнЬи стаканов оператор, нажав на кнопку пуск 10, взводит триггер 13, сигнал с выхода которого поступает на элементъ совпадения 26 и 27. С выхода элемента 27 сигнал Z - 1 поступает на пневматический исполнительный механизм 1, открывая путь вакууму в подсосковое пространство доильных стаканов. С наступлением активного припуска молока частота пневматического дискретного сигнала X , формируемого датчик cw интенсивности молочного потока, оказывается достаточной для сраба1ъшания временной задержки Т,. При этом сигнал 3 выхода инвертора 20 взводит триггер 2i., тем самым подготавливая к работе элементы ссжпадения 22 и 23 Со снижением интенсивнос-ге молокоотдачи до заданной величины срабзгтывает временная задержки Т включающая в работу генератор 15. Серия импульсных сигналов с его выхода поступает в цилиндр пневматического исполнительного механизма 2. Начинается процесс машинного додаивания. После прекращения молокоотдачи сра батывает третья временная задержка 1Г, и сигнал, появлшощийся на выходе элемента 25 объединения, стирает триг геры. При этом машинное додаивание прекращается, пневма-гаческий исполнительный механиз 1 перосрьюает вакуу доильных стаканов в пневмоцилиндр, на вход которого с элемента совпадения 27 теперь поступит сигнал Z 1 и отводит доильные стаканы за пределы станка. Формула изобретения 1.Манипулятор к «доильным аппаратам, включающий датчик, блок управления и исполнительный механизм, отличающийся тем, что, с целые повышения надежности в работе, на входе блока управления установлены элементы задержки, подключенные к элементам сравнения, причем один из элементов задержки включен через инвертор и триггер. 2,Манипулятор по п. 1, о т л и чающийся тем, что блок управления заключен в вакуумированном корпусе. Источники инфоормации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 239О99, кл. А 01 J 5/04, 1967. 2.Авторское свидетельство СССР № 392916, кл. 01 J 5/04, 1969,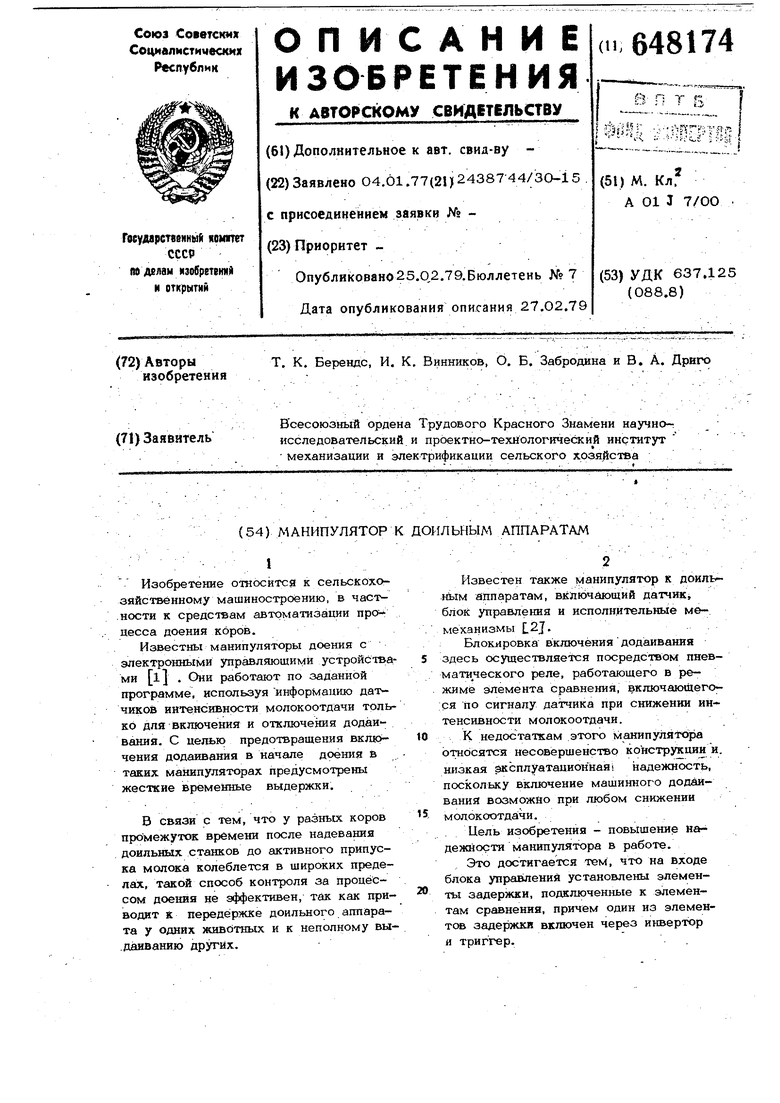

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для доения коров | 1983 |
|
SU1147301A1 |
| МАНИПУЛЯТОР ВИННИКОВА И.К. | 1995 |
|
RU2097965C1 |
| Способ машинного доения коров | 1983 |
|
SU1169571A1 |
| СПОСОБ МАШИННОГО ДОЕНИЯ КОРОВ | 2009 |
|
RU2423046C2 |
| Манипулятор к доильным аппаратам | 1980 |
|
SU897179A1 |
| Индивидуальный дозатор корма в зависимости от величины надоя | 1985 |
|
SU1416090A1 |
| МОБИЛЬНЫЙ АВТОМАТ ДОЕНИЯ КОРОВ | 2000 |
|
RU2189737C2 |
| Манипулятор доильной установки | 1989 |
|
SU1699385A1 |
| Манипулятор доильной установки | 1990 |
|
SU1750511A1 |
| Доильная установка | 1987 |
|
SU1443861A1 |
) хг
tt
Вакууи
IJЛ-А
