1
Изобретеиие относится к области маиипуляторостроеиия, в частности к уиравлению исполнительным органом механической руки, и может быть использовано для обнаружения и захвата ферромагнитных деталей с ферромагнитиых поверхностей.
Известны манииуляторы с механическим исполнительным органом, снабженным индикатором последовательно заданных положений и сервосистемой, уиравляющей захватом манипулятора в соответствии с программой заданных операций 1.
Недостатком этих манииуляторов является сложность систем датчиков индикации положений, сложность сервосистемы и программного устройства.
Известен манипулятор, который содержит механическую руку с захватом и систему управления 2.
В системе управления манипулятором используется электронно-вычнслительная машииа (ЭВМ). Программой определяется задача пайти в пространстве предмет и перенести в указанное место. Поскольку у робота нет органов зрения, он обыскивает пространство наощупь и обнаруживает предмет с помощью тактильных датчиков, захватывает предмет и переносит его в указанное место.
Недостатком известного манипулятора
является сложность электронно-вычислительной машины, необходимой для определеппя коордииат перемещений всех сочлепеппй но координатам перемещения пальцев и низкая ирО зводительность манипулятора, обусловленная тем, что поиск детали наощупь требует больщнх затрат времени.
Це.тью пзобретения является повыщение производительпости манипулятора за счет
автоматизации попска детали на плоскости. Поставленная цель достигается тем, что у иредложепного манипулятора для захвата ферромагпптных деталей с ферромагнитных поверхностей, содержащего горизонтальн}ю лгеханическую руку с захватом в виде электромагнита и систему управления, рука выиолнена нз ферромагнитного материала и снабжена дополнительной 1змерптельной обмоткой, а обмотка электромагнита нрисоединена через блок унравления к источникам переменного н постоянного тока, прнчем электромагнит выполнен Ш-образным, его обмотка расположена на среднем магнитоироводе, а крайние магнитопроводы нрикрег1леиы к корпусу элeктpo iaгнита нтарнирно с возможностью фиксации в горпзоиталыюм и вертикальном положении. Па фиг. 1 схематически пзображен манипулятор перед началом работы; на фиг. 2-
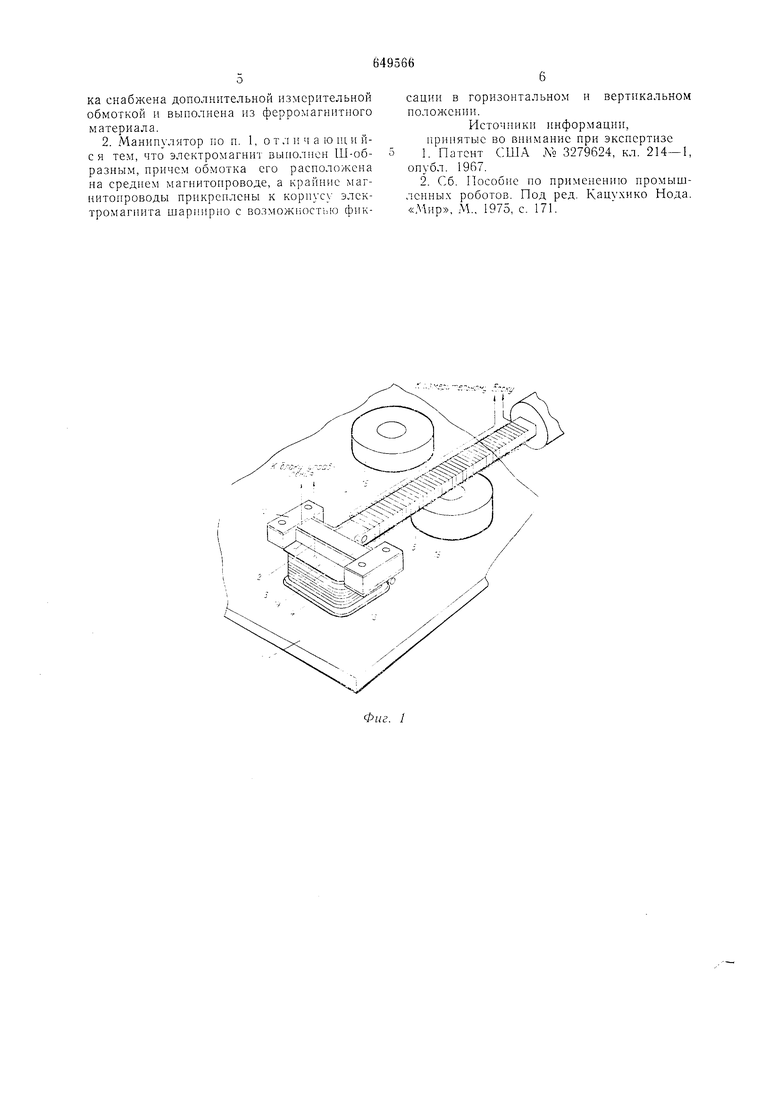
то же в момент работы; на фиг. 3 - струк3
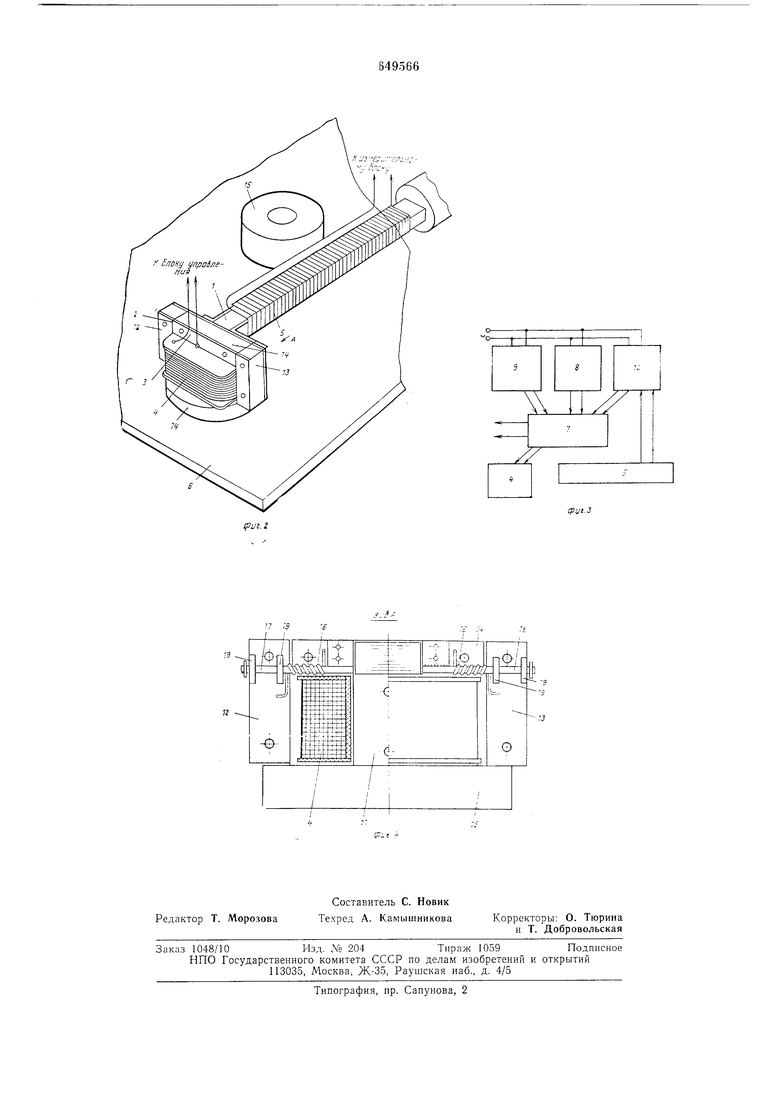
турная схема управления и питания манииулятора; иа фиг. 4 - вид ио стрелке А иа фиг. 2.
Манипулятор содержит мехаиичеекую руку 1, выполнеиную нз ферро.магнитпого материала с захватом 2 в виде электромагнита 3 с силовой обмоткой 4.
Рука 1 снабжена дополнительно измерительной обмоткой 5 и рас оложе а араллельно ферромагнитной плоскости 6.
Обмотка 4 электромаг ита 3 соединена через блок 7 у фавления манипулятора с источииком 8 псреме 1ного тока источ 1иком 9 постоянного тока (см. фиг. 3). Измерительная обмотка 5 соединена с измерительным блоком 10, который соеди ен с блоком 7 управления.
Электромагнит 3 выпол1 ен Ш-образ ым, при этом его силовая обмотка располагается на среднем магиитонроводе 11, а крайние магнито1 роводы 12 и 13 прикреплены к корпусу 14 электромагн та шарнирно с возможность О фикса1,ии в горизоитал зиом и вертикальном положении. Крайние jMa nnTOпроводы 12 и 13 выполнены подвижными для уменьшения еремеииого магнитного поля рассеяния в юиска дета.ти 15 рукой 1.
Фиксация крайних магпито роводов 12 и 13 в горизонтальном положении может быть осуществлена с юмощь о пружин 16 закручивания, надетых на неподвижно прикрепленные к орпусу 14 оси 17 и 18. Оси 17 и 18 прикреплены к магнитопровоДам 12 и 13 с помощью ОД ЛИППИКОВ 19.
Пружина 16 одним концом касается корпуса 14, а другим - крайнего маг П1топровода 12 или 13.
В вертикальном положении маг 1ито 1роводы 12 и 13 фиксируются силовым полем постоянного магнита.
Манипулятор работает еледу 0 цим образом.
Для осуществления поиска детали рука 1 располагается над ферромагнитной плоскость О 6 таким образом, чтобы она охват лвала всю зону плоскости 6 с деталями. При этом силовая обмотка 4 электромаг 1ита 3 соединена с источником 8 неременного тока, в качестве которого используется, например, генератор высокой частот). Пружины 16 находятся в раскрученном свободном состоянии, и крайние магнитопроводы 12 и 13 Ш-образиого электромагнита 3 подняты в горизонтальное положение. Пр этом магнитные еиловые линии ноля замыка отся через магн топровод руки 1 и средний магнитопровод 11 электромагнита 3. В этом случае в измерительной обмотке 5 наводятся напряжение и ток холостого хода.
Рука 1 перемещается параллельно плоскости 6, и в тот момент, когда под рукой 1 окажется ферромагнитная деталь 15, магнитные силовые линии поля замыка отся через нее. При этом магнитное сопротивле ие магнитной цепи уменьшается, в измерительной обмотке 5 изменяется ток но модулю и фазе. И 1дуктивность силовой обмотки 4 п измерительной обмотки 5, а также взаимная индуктив ость между указанными обмотками функциями координат по.; ожения детали 15. Гок в измерительной обмотке 5 рямо нро 0рционален координате детали 15. Напряжение с измерительной
обмотки 5 фиксируется измерительным блоком 10, и с измерительного блока, пропорцно} альный координате нололсения детали, подается на блок 7 управления манипулятором.
Блок 7 управления вырабатывает и подает сигнал на перемещение руки 1 на величину координаты детали вдоль оси руки 1. При этом с началом выработки сигнала коорд нать детали 15 рука I с захватом 2
однимается на в лсоту детали от фиксированного сигнала, нредусмотре 1ного блоком 7 управления.
Захват 2 располагается над деталью, и в следующий момент блок 7 у равления откл Очает силовую обмотку 4 электромагнита 3 от источника 8 переменного тока и подкл Очает ее к источнику 9 постоянного тока. При этом под действием постоянного магнитного поля крайние магнитопроводы 12
и 13 Ш-образного электромагнита 3 поворачива отся вокруг осей 17 и 18 и устанавлива отся в вертикальное положение вдоль
линий магнитного поля.
Пружины 16 ри этом скручиваются. ДеTaj b 15 нритягиваетея электромагнитом 3 и 1ереносится рукой 1 в требуемое место в соответствии с заданной рограммой мани улятора. С блока управления подается следующая команда на отключение си.товой
обмотки 4 электромагнита 3 от источника 9 постоянного тока. При этом захват 2 освобождается от детали 15. Пружины 16, возвращаясь в исходное состояние, поднимают крайние магнитонроводь 12 и 13 в прежнее горизонтальное юложеиие.
Подключение силовой обмотки 4 к иеремен 1ому току не овлияет ia положение крайних маг 1ито роводов 12 и 13 электромагнита 3, так как с увеличением частоты иитающего тока уменьшается его силовое воздействие, п поиск детали 15 1роизводится 1ри ионил :енпь Х значениях тока в обмотке 4 во избежание магнитного насыщения цепи.
Формула изобретения
1. Манипулятор для захвата ферромагнитных деталей с ферромагнитных поверхностей, содержащий механическу 0 руку с
захватом в электромагнита и систему управления, отличающийся тем, что, с целью повышения производительности, он снабжен источниками переменного и постоянного тока, соединенными через блок управления с обмоткой электромагнита, а рука снабжена дополннтельной измерительной обмоткой и выполнена из ферромагнитного материала.
2. Манинулятор но н. 1, отлнчаюнщйся тем, что электромагнит выполнен Ш-образным, нрнчем обмотка его расноложена на среднем магнитоироводе, а крайние лгагннтонроводы прикренлены к корнусу электромагнита шарнирно с возмож11ость о фнксацин в горизонтальном и вертикальном положении.
Источники информации, нрииятые во внимание нри экснертизе
1.Патент США Л 3279624, кл. 214-, опубл. 1967.
2.Сб. Пособие по применению промышленных роботов. Под ред. Кацухико Нода. «Мир, М., 1975, с. 171.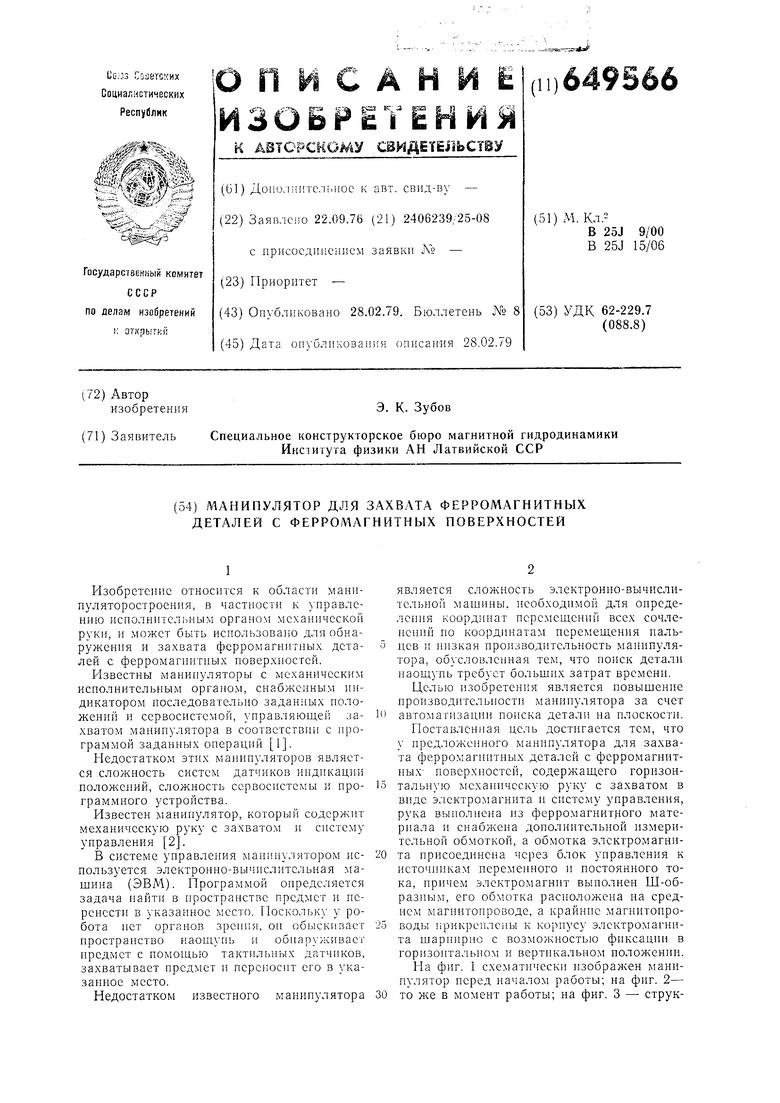

| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для захватывания ферромагнитных деталей | 1981 |
|
SU975393A1 |
| Устройство для транспортирования и накопления ферромагнитных деталей | 1986 |
|
SU1313630A1 |
| Схват для ферромагнитных деталей | 1986 |
|
SU1342729A1 |
| Манипулятор | 1980 |
|
SU996183A1 |
| Электромагнитный поворотный захват манипулятора для ферромагнитных деталей | 1978 |
|
SU747716A1 |
| Способ манипулирования ферромагнитными деталями с отверстием | 1986 |
|
SU1799727A1 |
| Манипулятор для захвата ферромагнитных деталей | 1982 |
|
SU1057268A1 |
| Устройство для ориентации ферромагнитных деталей | 1986 |
|
SU1399061A1 |
| Устройство для контроля физико-механических параметров ферромагнитных изделий | 1987 |
|
SU1456861A1 |
| Электромагнитный захват | 1982 |
|
SU1074800A1 |
(PUI.3
