(54) МАНИПУЛЯТОР ДЛЯ ЗАХВАТЫВАНИЯ ФЕРРОтГНИТНЫХ МАТЕРИАЛОВ
1
Изобретение относится к машиностроению, а более конкретно к маниПуляторам для захвата ферромагнитных деталей..
Известен манипулятор для захва-тывания ферромагнитных деталей, содержащий руку е захватом в виде электромагнита, обмотка которого через коммутирущее устройство подключена к источникам питания переменного и постоянного тока, датчик наличия детали, подключенный к обмотке электромагнита и систему управления 1,
Недостатком известного манипулятора является то, что при его использовании невозможно распознавание ориентированного положения детали, что снижает его технологическую и функциональную универсальность и позволяет использовать для, захвата ограниченного класса простых по конфигурации деталей.
Кроме того, он не обеспечивает формирование программы на переориен-,
тирование детали и ее реализацию в процессе транспортирования детали к рабочей позиции, что существенно снижает технологические возможности манипулятора и не позволяет использовать его на операциях многономенклатурного сборочного производства.
Цель изобретения - расширение технологических возможностей мани10пулятора.
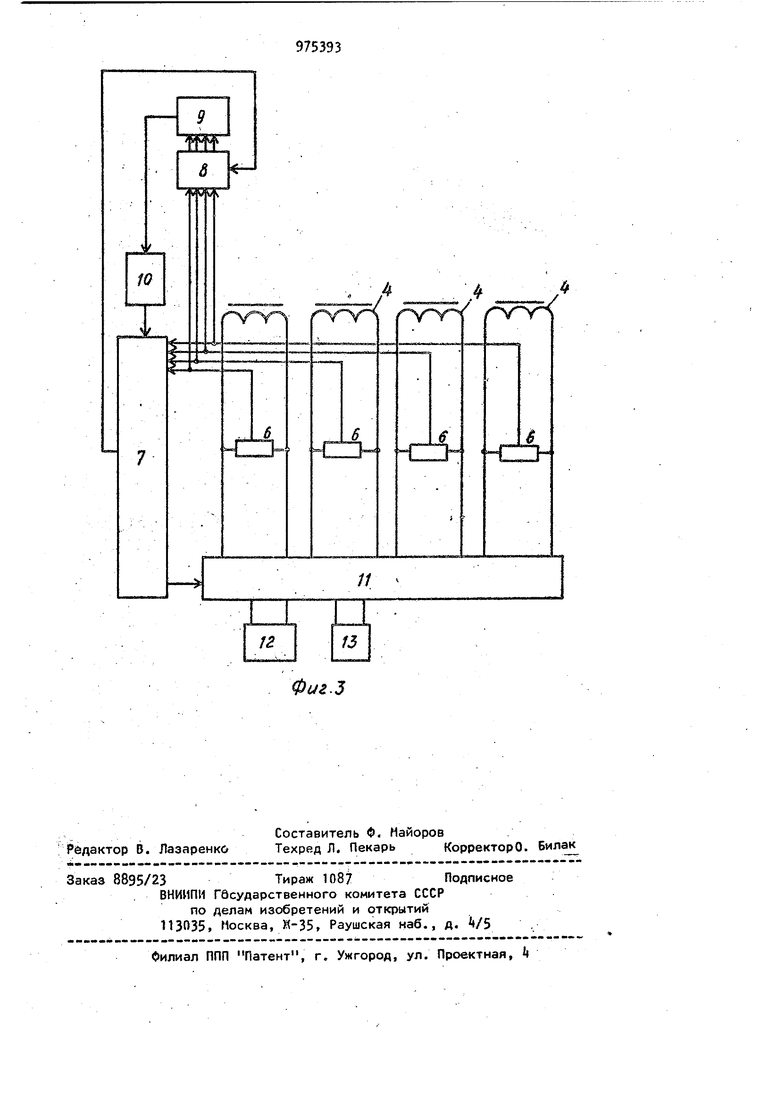
Поставленная цель достигается тем, что манипулятор снабжен логической схемой формирования программы переориентирования деталей, банком образов номенклатуры и .банком различных устойчивых положений детали, а электромагнит выполнен в виде системы чередуюи;ихся магнитопроводов, снабженных индивидуальными об20мотками, при этом выходы датчиков наличия деталей соединены с входами системы управления и входами банка образцов номенклатуры, выходы которо- го через последовательно соединенные банк образцов различных устойчивых положений и логическую схему фор мирования программы переориентирования деталей подключены к входу системы управления, один выход которой подключен к входу банка образцов номенклатуры,; а другой - к входу коммутирующего устройства. ; На фиг. 1 изображен захват пред-лагаемопо манипулятора; на фиг. 2 вид Л на фиг. Г; на фиг, 3 схема питания и управления манипулятором. Система исполнительных механизмов манипуляторй для переориентирования деталей не приведена. .Манипулятор содержит руку 1 {фиг. с захватом 2 в виде электромагнита, представляющего собой систему чере дующихся магнитопроводов 3, снабженных индивидуальными электричес кими обмотками и разделенных экранирующими .элементами 5На секцию каждой электрической обмотки включен датчик 6 детали (фиг. З) связанный электрически с системой 7 управления манипулятора ми и с входом банка 8 образцов номенклатуры деталей, соединенным во входам банка 9 образцов различных устойчивых положенийдетали. Последний связан с логической схемой 10 формирования программы переориентиро вания детали, своим выходом подсоеди ненной к системе 7 управления. Элек рические обмотки k связаны электрически через коммутирующее устройство 11 изменения режимов работы инди видуальных электрических обмоток с источниками 12 и 13 питания соответственно переменного и постоянного то ка, а само коммутирующее устройство 11 соединено с системой 7 .управления манипулятора. Манипулятор предназначен для перемещения детали Ik. Манипулятор работает .следующим образом. Ре}хим поиска. В .исходном состоянии все индивидуальные электрические обмотки k отключены от цепей питания. Контакты коммутирующего устройства 11 изме нения режимов работы индивидуаленых электрических обмоток t разомкнуты , Входные каналы банка 8 образов номенклатуры деталей зашунтированы сие темой 7 управления. По сигналу системы 7 управления манипулятором на поиск детали 1 срабатывает коммути рующее устройство Г1 изменения режинов работы индивидуальных электрических обмоток k и соединяет группу электрических обмоток , расположенных в центральной части захвата 2, с источником 12 питания переменного тока. Магнитные силовые линии поля замыкаются через магнитопроводы 3 с под.ключенными к источнику 12 питания переменного тока электрическими обмотками -и через магнитопроводы 3 с отключенными от цепи источника 12 питания переменного токаэлектрическими обмотками k. Рука 1 манипу-., лятора начинает осуществлять сканирующее движения. В тот момент, когда под захватом 2 окажется .ферромагнитная деталь 14, магнитные силовые линии замыкаются через нее, при этом сопротивление магнитных цепей уменьшается. Напряжение с обмоток k, подключенных к источнику 12 питания переменного тока, фиксируется датчиками 6 наличия детали. При поступлении с датчиков б наличия детали сигнала, равного опорному, рука 1 манипулятора останавливается . Режим распознавания. Система 7 управления подает команду на коммутирую1цее устройст-, во 11 .изменения режимов работы индивидуальных электрических обмоток k, последнее подключает к источнику 12 питания переменного тока все электрические обмотки 4,Сигналы, поступающие с датчиков 6 наличия деталей, не воспринимаются системой 7 управления и поступают на входы банка 8 образов номенклатуры деталей, где осуществляется поиск образа, соответствующего классу распознаваемой. детали. Так как детали могут подаваться на позицию захвата манипулятора в нескольких устойчивых различимых положениях, то при выявленном образе детали 1. банк 8 образов номенкулатуры деталей осуществляет коммутацию каналов выходов датчика 6 на входы банка 9 образов различимых устойчивых положений детали, где производится поиск различимого устойчивого положения, соответствующего расположению детали 14 на позиции захвата 2..По окончании поиска и определения положения детали на позиции захвата данные о детали 14 поступают в логическую схему 10 формирования программы на переориентирование детали 14.
По окончании формирования програм мы на переориентирование детали Т программа передается в систему 7 управления манипулятором, последняя подает команду коммутирующему устрой ству 11 изменения режимов работы индивидуальных электрических обмоток Ц на отключение электрических обмо ток 4 от цепи источника 12 питания переменного тока..
Режим захвата и переориентирования детали.
По сигналу системы 7 управления коммутирующее устройство 11 изменений режимов работы индивидуальных электрических обмоток t подключает либо все, либо масть требуемых обмоток к источнику 13 питания постоянного тока. Электромагнит срабатывает и захватывает деталь 1. . По командам системы 7 управления, сформированным программой логичес- кой схемы 10 формирования программы переориентирования детали 1A, манипулятор осуществляет.переориентирование захвата 2 с деталью в процессе транспортирования к рабочей позиции в требуемое положение в пространстве. По окончании транспортирования и расположении захвата 2с деталью 1 в требуемом ориентированном положении по команде системы 7 управления коммутирующее устройств 11 изменения режимов работы индивидуальных электрических обмоток k зах вата 2, отключает обмотки от источника 13 питания постоянного тока. Деталь освобождается и располагается в требуемом ориентированном положениина рабочей позиции.
Таким образом, изобретение позволяет расширить технологические и функциональные возможности манипулйтра, что способствует применению его
для автоматизации технологических процессов в машиностроении и приборостроении, в том числе, при обслуживании сборочных операций.
Формула изобретения
Манипулятор для захватывания ферромагнитных деталей, содержащий руку с захватом в виде электромагнита, обмотка которого через коммутирующее устройство подключена к источникам .питания переменного и постоянного тока, датчик наличия детали, подклю ченный к обмотке электромагнита, и систему управления, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен логической схемой формирования программы переориентирования деталей, банком образов номенклатуры и банком различимых устойчивых положений детали, а электромагнит выполнен в виде системы чередующихся маг.нитопроводов, снабженных индивидуальными обмотками, при этом выходы датчиков наличия деталей соединены с входами системы управления и входами банка образов номенклатуры, выходы которого через последовательно соединенные банк образов различимых устойчивых положений и логическую схему формирования программы переориентирования деталей подключены к входу системы-управления, один выход которой подключен к входу банка образов номенклатуры, а другой - к входу коммутирующего устройства.
Источники информации, принятые во внимание при экспертизе
1, Авторское свидетельство СССР IP 6М9566, кл. В ,25 J 15/06, 1978,
Ш
771
Vy
Z


| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1980 |
|
SU996183A1 |
| Манипулятор для захвата ферромагнитных деталей с ферромагнитных поверхностей | 1976 |
|
SU649566A1 |
| Схват | 1986 |
|
SU1313700A1 |
| Электромагнитный схват | 1990 |
|
SU1798187A1 |
| Схват манипулятора | 1980 |
|
SU905064A1 |
| Автоматический компенсатор | 1960 |
|
SU135963A1 |
| Исполнительный орган манипулятора | 1987 |
|
SU1493460A1 |
| Схват | 1985 |
|
SU1284828A1 |
| Намагничивающее устройство | 1989 |
|
SU1793358A1 |
| Манипулятор и способ управления им | 1990 |
|
SU1782720A1 |

7
т
/ J
Фиг.2
Фиг.З
