При загрузке и разгрузке стеллажей лист перемещается по неприводным роликам, установленным в каждой полке стеллажа и в захвате тележки. При этом толкатель одним из клещевых захватов, удерживая лист, перемещается по направляющим, занимая в конце перемещения положение относительно листа со стороны, противоположной обслуживаемому стеллажу.
Прием листа с рольганга подачи на тележку и подача листа с тележки на рольганг выдачи осуществляются без использования толкателя за счет перемещения тележки и захода лап вильчатого захвата между роликами указанных рольгангов.
Однако известное устройство не может передать изделие по обе торцовые стороны тележки независимо от расноложения подающих рольгангов, что необходимо, например, по технологическому процессу на участках подготовки и очистки листа в заготовительных производствах. Этому препятствует конструкция толкателя, которая перекрывает пространство между рядами лап поворотного вильчатого захвата.
Целью изобретения является обеспечение возможности разгрузки изделий по обе стороны тележки независимо от расположения подающих рольгангов.
Это достигается тем, что каждый и: клещевых захватов установлен на толкателе шарнирно и снабжен механизмом подъема в рабочее положение, при этом одна из внутренних сторон вильчатого захвата снабжена роликами, между которыми заподлицо с их образующими размещен в направляющих толкатель, а привод перемещения толкателя установлен вне зоны транснортирования изделия, а также тем, что механизм подъема каждого клещевого захвата выполнен в виде электромагнита.
Такое выполнение устройства позволяет при холостых ходах двустороннего толкателя не перекрывать пространство между рядами лап поворотного в вертикальной нлоскости вильчатого захвата и обеспечивать передачу изделия по обе стороны тележки независимо от направления приема iimi выдачи.
Снабжение поворотного в вертикальной плоскости вильчатого захвата роликами и размещение заподлицо с их образующими направляющих двустороннего толкателя обеспечивают устойчивое перемещение в положениях, близком вертикальному и горизонтальном, изделий вне зависимости от их толщины в пределах зазора между лапами поворотного вильчатого захвата.
Пружины и электромагнит обеспечивают как блокировку в рабочих положениях клещевых захватов, так и позволяют иметь им некоторый свободный ход, что необходимо при перемещении изделий, имеющих отклонения от плоскостности.
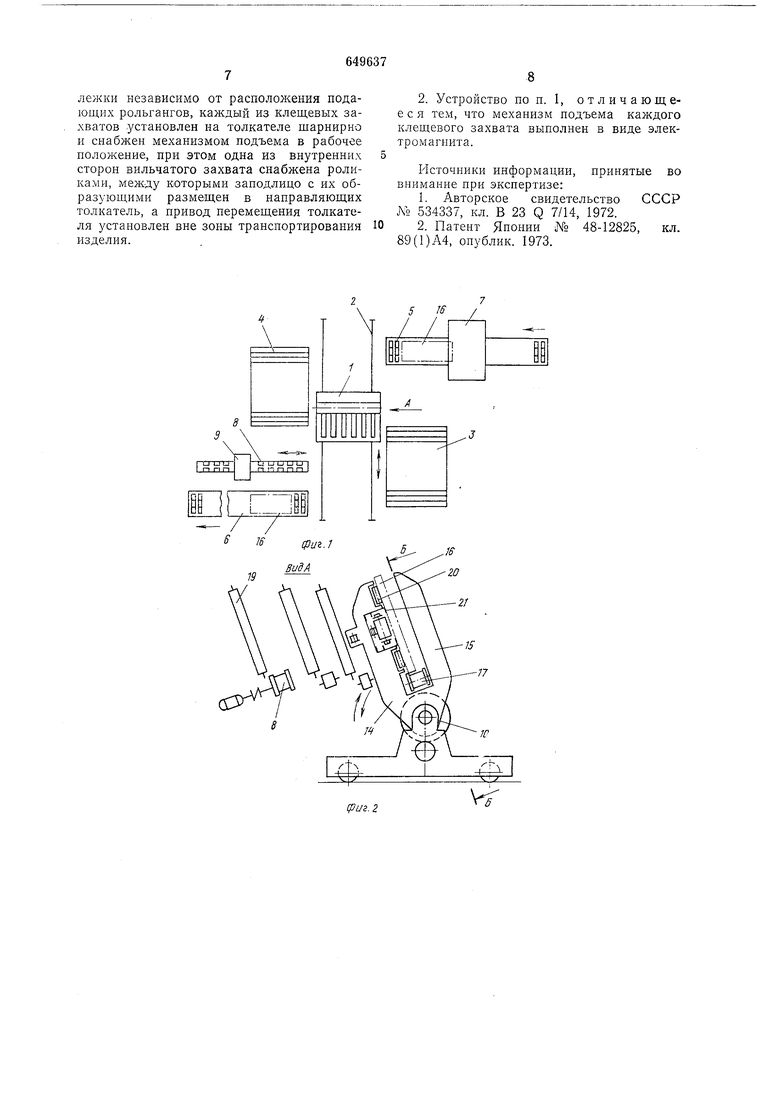
На фиг. 1 изображено описываемое устройство и примыкающее к нему технологическое оборудование, общий вид; на фиг. 2 - вид по стрелке А на фиг. 1; 5 фиг. 3 - разрез на фнг. 2; на фиг. 4 - двусторонний толкатель с клещевыми захватами.
Устройство включает электроприводиую тележку /, перемещающуюся по рельсовому пути 2, уложенному между торцамн двух рядов стеллажей 3 и 4 вертикального хранения листа и подающими рольгангами 5 и 6 соответственно горизонтальього перемещения листа в процессе правки на вальцах 7 и выдачи с устройства, а также сопряженному с подающим рольгангом 8 вертикального перемещения листа в процессе дробеметной очистки в камере 9.
Па тележке / с возможностью новорота в вертикальной плоскости установлен,вильчатый захват 10.
Поворот вильчатого захвата 10 осуществляется от двух электроприводов // (см. фиг. 3) через цилиндрические зубчатые передачи 12, вал 13, к которому жестко прикреплены два ряда лап 14. и /5.
Между лапами размещены опорные для
0 листа 16 ролики 17, уровень которых при положении захвата, близком к вертикальному, совпадает с уровнем роликом 18 в стеллажах 3 и 4 вертикального хранения листа и подающего рольганга 8 вертикального перемещения листа в процессе дробеметной очистки.
Вильчатый захват 10 может заннмать два фиксированных положения: горизонтальное н близкое к вертикальному с углом от горизонтали, меньшим 90° и соответствующим углу наклона примыкающих полок 19 стеллажей 5 и 4 и подающего рольганга 8 вертикального перемещения листа в процессе дробеметной очистки в
5 камере 9.
В один ряд лап 14 вильчатого захвата 10 вмонтированы ролики 20, нри этом ось каждой пары роликов совпадает с осью роликов 17 каждой лапы, а образующие
0 роликов 20 размещаются заподлицо с направляющими 21, соединяющими ряды лап 14.
Направляющие 21 размещаются в пространстве между рядами роликов 20, в которых в свою очередь установлен с возможностью перемещения двусторонний толкатель 22. Толкатель 22 снабжен утапливающимися в направляющие 21 клещевыми захватами 23 и 24. Толкатель 22 ио0 жет совершать возвратно-поступательное дви}кение с одного края направляющих 24 на другой от стационарно установленного вне зоны перемещения листа электропривода 25. Электропривод передает вращение
звездочке 26, а тяговое усилие - цепи 27,
огибающей звездочки 26 и 28 и соединенной с корпусом толкателя пальцем 29.
Звездочки 26 и 28 установлены по краям направляюн их 21.
Клетевые захваты 23 и 24 имеют возможность поворота относительно шарниров 30 и 31 за счет независимо работающих самоблокирующихся в рабочих положениях электромагнитов 32 и 33.
При этом в рабочем положении при захвате и перемещении листа клещевой захват может выводиться соответствующим электромагнитом в пространство между рядами лап 14 и 15, а в нерабочем положении может убираться в направляющие 21.
В связи с имеющими место отклонениями от плоскостности листа и невозмол ностью строгого прямолинейного его перемещения клещевым захватом в пространстве между лапами 14 и 15, каждый клещевой захват установлен на рычажно-пружииной подвеске, причем регулировка усилия сжатия пружин 34 осуществляется винтами 55. Такая конструкция позволяет в процессе перемещения листа толкателем иметь некоторый свободный ход клещевых захватов 23 и 24 относительно щарниров 30 и 31.
Работа устройства осуществляется следуюц им образом.
Лист 16 после технологической обработки-правки на вальцах 7 в горизонтальном положении перемещается по приводному подающему рольгангу 5, с которого направляется па тележку /.
Прц этом тележка / устанавливается напротив подающего рольганга 5 таким образом, что вильчатый захват 10, находясь в горизонтальном ноложении, роликами 20 устанавливается в уровень с роликами рольганга 5.
Толкатель 22 перемещается в направляюииьх 2 к подающему рольгангу 5. Клещевой захват 23 выводится электромагнитом 32 в рабочее положение, т. е. в пространство между рядами лап 14 и 15 выше уровня роликов 20, и в крайнем правом положении захватывает лист 16. Возвратным перемещением приводом 25 через тяговую цепь 27, огибающую звездочки 26 и 28, толкатель устанавливает лист внутрь вильчатого захвата 10.
Тележка 1 перемещается к соответствующей полке стеллажей 3 или 4 для укладки листа на промежуточное складирование. Вильчатый захват 10 поворачивается от электроприводов // через зубчатую передачу 12 и вал 13 на угол, меньший 90° и соответствующий углу наклона полки 19 стеллажа.
В случае укладки в стеллаж 3 толкатель 22 перемепгается к стеллажу и перекатывает лист 16 по роликам 17 захвата 10 и далее по непривадиым роликам 18 стеллажа.
В случае укладки листа в стеллаж; / клещевой захват 23, поворачиваясь относительно шарнира 30, предварительно утапливается электромагнитом 32 в направляющую 21, толкатель перемещается на противоположную сторону направляющих 21 в лапах 14, осуществляется захват листа клещевым захватом 24, ири этом работает электромагиит 33, и захват 24 поворачивается относите.тьно шарнира 31.
Возвратным неремещением лист 16 отправляется на полку стеллажа 4.
В дальнейшем лист описанным выше способом забирается из стеллалсей 3 и 4 и проходит в положении, близком к вертикальному, дробеметную обработку в ка,;ере 9. При этом толкатель 22 выталкивает лист из вильчатого захвата на приводной реверсивный подающш рольган 3, с которого затем забирает лист. Подающий рольганг 8 вертикального перемещения листа в отличие от полок стеллажа имеет приводные ролики для транспортировки листа через камеру 9.
После прохождения цикла технологической обработки лист 16 тележкой / перемещается к горизонтальному подающему рольгангу 6, вильчатый захват 10 переводится в горизонтальное положение, при этом уровни роликов рольгаига и захвата совпадают.
Лист клещевым захватом 24 выталкивается с устройства на подающий рольганг 6 и забирается цеховым краном с устройства.
Управление устройством может быть осуществлено автоматически или оператором из кабины, смонтированной иа тележке / вне зоны вильчатого захвата 10.
Применение устройства позволяет независимо от расположения подающих рольгангов обеспечить разгрузку изделий по обе стороны тележки, объединяя в единую транспортио-технологическую систему технологическое (правка, очистка) и подъемно-траиспортное оборудование, исключить тяжелый труд стропальщика на операцпя.ч складирования, кантования, сократить площади за счет вертикального хранен1 я листа, повысить безопасность прозеденим работ.
Формула изобретения
1. Устройство для манипулирования изделиями, например стальным листовым атериалом, включающее подающие рольганги, стеллажи, рельсовый путь, тележку, на которой смонтирован поворотный в вертикальной плоскости впльчатыС; захват, и двусторониий толкатель с перемещения и клещевыми захватами, з-стаиоиленный в направляющих, о т л и ч а ю щ ее с я тем, что, с целью обеспечения возможности разгрузки изделий по обе стороны тележки независимо от расположения подающих рольгангов, каждый из клещевых захватов установлен на толкателе щарнирно и снабжен механизмом подъема в рабочее положение, при этом одпа из внутренних сторон вильчатого захвата снабжена роликами, между которыми заподлицо с их образующими размещен в направляющих толкатель, а привод перемещения толкателя установлен вне зоны транспортирования изделия.
8
2. Устройство по п. 1, отличающееся тем, что механизм подъема каждого клещевого захвата выполнен в виде электромагнита.
Источники информапии,
принятые во внимание при экспертизе:
1.Авторское свидетельство СССР ЛЬ 534337, кл. В 23 Q 7/14, 1972.
2.Патент Японии № 48-12825, кл. 89(1)А4, опублик. 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Линия металлизации проката | 1982 |
|
SU1047991A1 |
| Автоматическая линия формования и сушки керамических изделий | 1978 |
|
SU764985A1 |
| Грузоподъемная площадка крана-штабелера | 1985 |
|
SU1283199A1 |
| Устройство для изготовления отводов | 1989 |
|
SU1682006A1 |
| Склад штучных грузов | 1980 |
|
SU992345A1 |
| Устройство для транспортирования изделий в сушильной камере | 1990 |
|
SU1772056A1 |
| АВТОМАТ УКЛАДКИ И СЪЕМА КИРПИЧА | 1991 |
|
RU2049665C1 |
| Грузоподъемное устройство | 1982 |
|
SU1123982A1 |
| УСТРОЙСТВО для ЗАГРУЗКИ и РАЗГРУЗКИ МНОГОЯРУСНЫХ СТЕЛЛАЖЕЙ | 1973 |
|
SU370142A1 |
| Устройство для укладки заготовок протекторов | 1980 |
|
SU973390A1 |

Сриг.2
26
27
28
