t5
Изобретение относится к погрузочно- разгрузочной технике, применяемой на складах и в гибких автоматизированных производствах, и может быть использовано преимущественно при работе с многоярусными стеллажами.
Цель изобретения - повышение производительности.
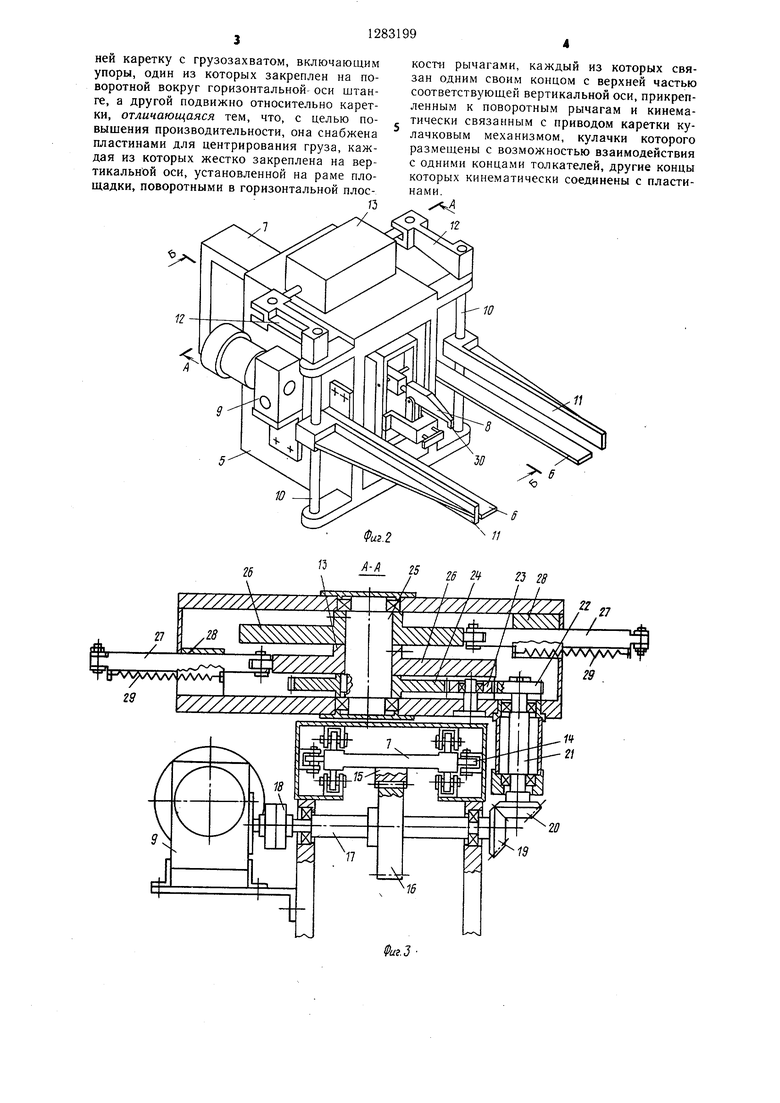
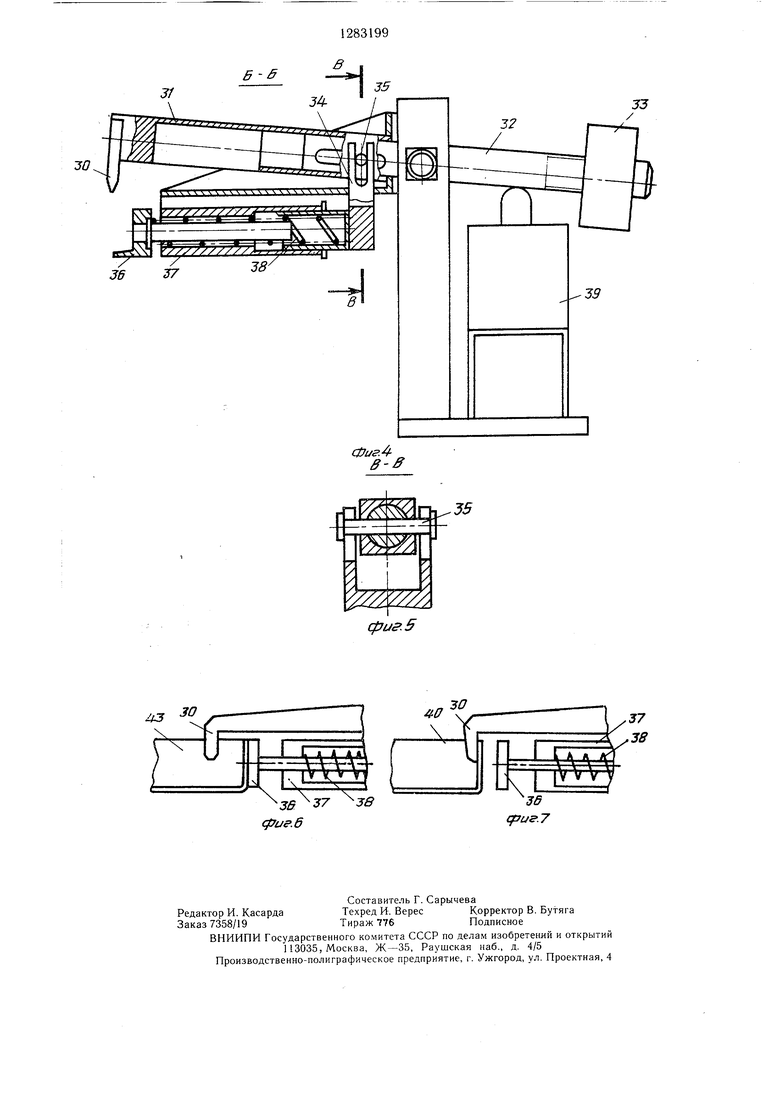
На фиг. 1 изображен кран-штабелер, общий вид; на фиг. 2 - грузоподъемная площадка крана-щтабелера; на фиг. 3 - Ю разрез А-А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 2; на фиг. 5 - разрез В-В на фиг. 4; на фиг. 6 - взаимное расположение захватного устройства и поддона при загрузке стеллажа; на фиг. 7 - то же, при разгрузке стеллажа.
На тележке 1, установленной на рельсовые -пути, жестко закреплены вертикальные направляющие 2, служащие для перемещения грузоподъемной площадки 3 с помощью привода 4.
Площадка 3 имеет раму 5, перпендикулярные направлению движения тележки 1 горизонтальные направляющие 6 для перемещения по ним поддона, каретку 7 с установленным на ней грузозахватом 8. На раме 5 установлен привод 9, закреплены оси 10, на которых жестко установлены пластины 11 для центрирования груза. Оси 10 при помощи рычагов 12 связаны с кулачковым механизмом 13.
Каретка 7 установлена в направляющих роликах 14, на ней жестко закреплена зубчатая рейка 15, связанная с зубчатым колесом 16, жестко установленным в средней части вала 17, который одним своим концом связан через муфту 18 с приводом 9, а другим через конические зубчатые колеса 19 и 20, вал 21 и цилиндрические зубчатые колеса 22 и 23 - с кулачковым механизмом 13, состоящим из зубчатого колеса 24, жестко установленного на валу 25 и находящегося в зацеплета 35. Вилка 34 соединена с подвижным упором 36, установленным в направляющей 37 с помощью пружины 38. Приводом грузо- захвата 8 является электромагнит 39. На полках стеллажа установлен груз 40.
Кран-штабелер работает следующим образом.
Перед началом цикла работы каретка 7 находится в исходном положении, подвижные пластины 11 сведены, скоба 30 поднята в верхнее положение. Кран-штабелер перемещается вдоль рядов стеллажей и останавливается в требуемом месте.
Грузоподъемная площадка 3 перемещается по направляющим 2 и останавливается против соответствующих направляющих ячейки стеллажа.
Перемещением каретки 7 по направляющим роликам 14 при помощи привода 9 грузозахватное устройство подводится к поддону 40 так, что упор 36 соприкасает- 20 ся со стенкой поддона 40, одновременно подвижные пластины 11 раскрываются. Магнит 39 включается и поворачивает штанги 31 и 32 вокруг горизонтальной оси, при этом скоба 30 вводится в поддон 40. Обратным перемещением каретки 7 при помощи привода 9 поддон вытягивается из ячейки стеллажа на направляющие 6. Одновременно с обратным перемещением каретки 7 подвижные пластины 11 сдвигаются.
25
35
В начале хода каретки 7 поддон 40 из ячейки стеллажа выдвигается в больщой зазор между подвижными пластинами 11 перекрывающий неточность остановки крана- щтабелера относительно ячейки стеллажа. В середине хода каретки 7 пластины 11 начинают сходиться и центрируют поддон 40 относительно оси грузозахвата 8. В конце хода каретки 7 поддон 40 движется в минимальном зазоре между пластинами 11.
При загрузке стеллажа кран-штабелер работает в обратном порядке. При этом в нании с зубчатым колесом 23, двух кулач- 40 чале движения каретки 7 при помощи при- ков 26, развернутых в горизонтальной плос- вода 9 поддон 40 направляется пластина- друг относительно друга на 180°
кости друг относительно друга на и жестко закрепленных на валу 25, и толкателей 27, установленных в направляющих 28. Силовое замыкание кулачковых механизмов осуществляется пружинами 29. Профиль кулачков 26 выполнен таким образом, что в начале и конце хода каретки 7 толкатели имеют выстой. Толкатели 27 соединены с рычагами 12.
Грузозахват 8 состой из упора, например скобы 30, жестко закрепленной на поворотной относительно горизонтальной оси щтанге 31, которая установлена с возможностью осевого смещения на штанге 32, на конце которой расположен груз 33 для уравновешивания скобы 30.
Штанга 31 соединена с вилкой 34, имеющей вертикальный паз, при помощи штиф45
ми 11 в приемную ячейку стеллажа. После захода конца поддона 40 в ячейку пластины 11 начинают раздвигаться, освобождая поддон и позволяя ему двигаться по направлению ячейки стеллажа.
В конце хода каретки 7 поддон 40 прижимается упором 36 посредством пружины 38 к задней стенке ячейки стеллажа и центрируется по ней. Отключается магнит 39, 50 скоба 30 поднимается и освобождает поддон 40. Каретка 7 при помощи привода 9 возвращается в исходное положение. Затем цикл повторяется.
55Формула изобретения
Грузоподъемная площадка крана-щтабелера, содержащая раму, устайовленную на
та 35. Вилка 34 соединена с подвижным упором 36, установленным в направляющей 37 с помощью пружины 38. Приводом грузо- захвата 8 является электромагнит 39. На полках стеллажа установлен груз 40.
Кран-штабелер работает следующим образом.
Перед началом цикла работы каретка 7 находится в исходном положении, подвижные пластины 11 сведены, скоба 30 поднята в верхнее положение. Кран-штабелер перемещается вдоль рядов стеллажей и останавливается в требуемом месте.
Грузоподъемная площадка 3 перемещается по направляющим 2 и останавливается против соответствующих направляющих ячейки стеллажа.
Перемещением каретки 7 по направляющим роликам 14 при помощи привода 9 грузозахватное устройство подводится к поддону 40 так, что упор 36 соприкасает- 0 ся со стенкой поддона 40, одновременно подвижные пластины 11 раскрываются. Магнит 39 включается и поворачивает штанги 31 и 32 вокруг горизонтальной оси, при этом скоба 30 вводится в поддон 40. Обратным перемещением каретки 7 при помощи привода 9 поддон вытягивается из ячейки стеллажа на направляющие 6. Одновременно с обратным перемещением каретки 7 подвижные пластины 11 сдвигаются.
5
5
В начале хода каретки 7 поддон 40 из ячейки стеллажа выдвигается в больщой зазор между подвижными пластинами 11 перекрывающий неточность остановки крана- щтабелера относительно ячейки стеллажа. В середине хода каретки 7 пластины 11 начинают сходиться и центрируют поддон 40 относительно оси грузозахвата 8. В конце хода каретки 7 поддон 40 движется в минимальном зазоре между пластинами 11.
При загрузке стеллажа кран-штабелер работает в обратном порядке. При этом в начале движения каретки 7 при помощи при- вода 9 поддон 40 направляется пластина-
ми 11 в приемную ячейку стеллажа. После захода конца поддона 40 в ячейку пластины 11 начинают раздвигаться, освобождая поддон и позволяя ему двигаться по направлению ячейки стеллажа.
В конце хода каретки 7 поддон 40 прижимается упором 36 посредством пружины 38 к задней стенке ячейки стеллажа и центрируется по ней. Отключается магнит 39, скоба 30 поднимается и освобождает поддон 40. Каретка 7 при помощи привода 9 возвращается в исходное положение. Затем цикл овторяется.
55Формула изобретения
Грузоподъемная площадка крана-щтабелера, содержащая раму, устайовленную на
ней каретку с грузозахватом, включающим упоры, один из которых закреплен на поворотной вокруг горизонтальной оси штанге, а другой подвижно относительно каретки, отличающаяся тем, что, с целью повышения производительности, она снабжена пластинами для центрирования груза, каждая из которых жестко закреплена на вер- тикальнЪй оси, установленной на раме площадки, поворотными в горизонтальной плос/3
KOCTi i рычагами, каждый из которых связан одним своим концом с верхней частью соответствующей вертикальной оси, прикрепленным к поворотным рычагам и кинематически связанным с приводом каретки кулачковым механизмом, кулачки которого размещены с возможностью взаимодействия с одними концами толкателей, другие концы которых кинематически соединены с пластинами.
Б-6
31
33
&Ш
Ъ
.55
фиг. 5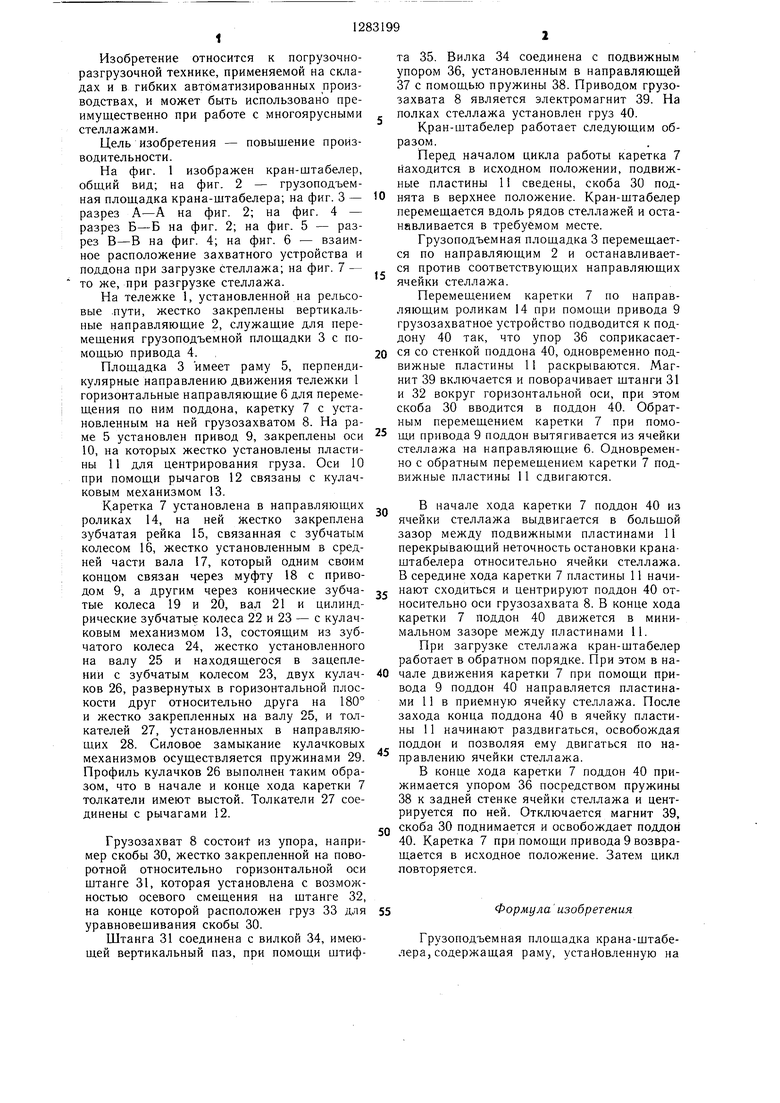
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемная площадка крана-штабелера | 1979 |
|
SU918219A1 |
| Грузозахват для стеллажного крана-штабелера | 1980 |
|
SU874600A1 |
| Грузоподъемная площадка крана- штабелера | 1978 |
|
SU740660A1 |
| Склад для хранения шин | 1986 |
|
SU1404419A1 |
| Кран-штабелер | 1971 |
|
SU537916A1 |
| Грузоподъемная площадка крана-штабелера | 1981 |
|
SU1014788A1 |
| Грузоподъемная площадка крана-штабелера | 1986 |
|
SU1384503A2 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1981 |
|
SU1000353A1 |
| Грузоподъемная площадка крана-штабелера | 1987 |
|
SU1530535A1 |
| Кран-штабелер для длинномерных грузов | 1979 |
|
SU867818A1 |
Изобретение относится к грузоподъемным площадкам кранов-штабелеров и позволяет повысить надежность работы путем повышения точности фиксации груза относительно нее. Подвижный упор 36 при вза имодействии с грузом 40 опускает штангу 31 со скобой 30, которая захватывает груз 40. На раме 5 грузоподъемной плошадки 3 подвижно установлены пластины 11 для центрирования груза 40, кинематически связанные с приводом каретки 7, на которой смонтированы подвижный упор 36 и скоба 30 для захвата груза на штанге 30. При взаимодействии с грузом упор 36 опускает штангу 31 со скобой 30, которая захватывает груз. Пластины 11 взаимодействуют с грузом и центрируют его относительно скобы 30. 7 ил. W ГС 00 со со со Й/г.7
| Грузоподъемная площадка крана- штабелера | 1978 |
|
SU740660A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
