I
Изобретение относится к системам автоматического управления и может быть использовано для формирования коэффициентов обратной связи и соответственно сигнала -управления многорежимными объектами, описываемыми для каждого режима системой линеаризованных дифференциальных, уравнений произвольного порядка.
Цель изобретения - повышение быстродействия формирования оптимальных .коэффициентов обратной связи и соответственно последующего формирования сигнала управления. ,
Цель изобретения достигается за счет реализации специадьной стратегии управления, позволяющей свести задачу формирования оптимального управления к решению системы линейных дифференциальнБ1х уравнений с по- следуюнщм простым функционалъшм вычислением матричного коэффициента обратной связи.
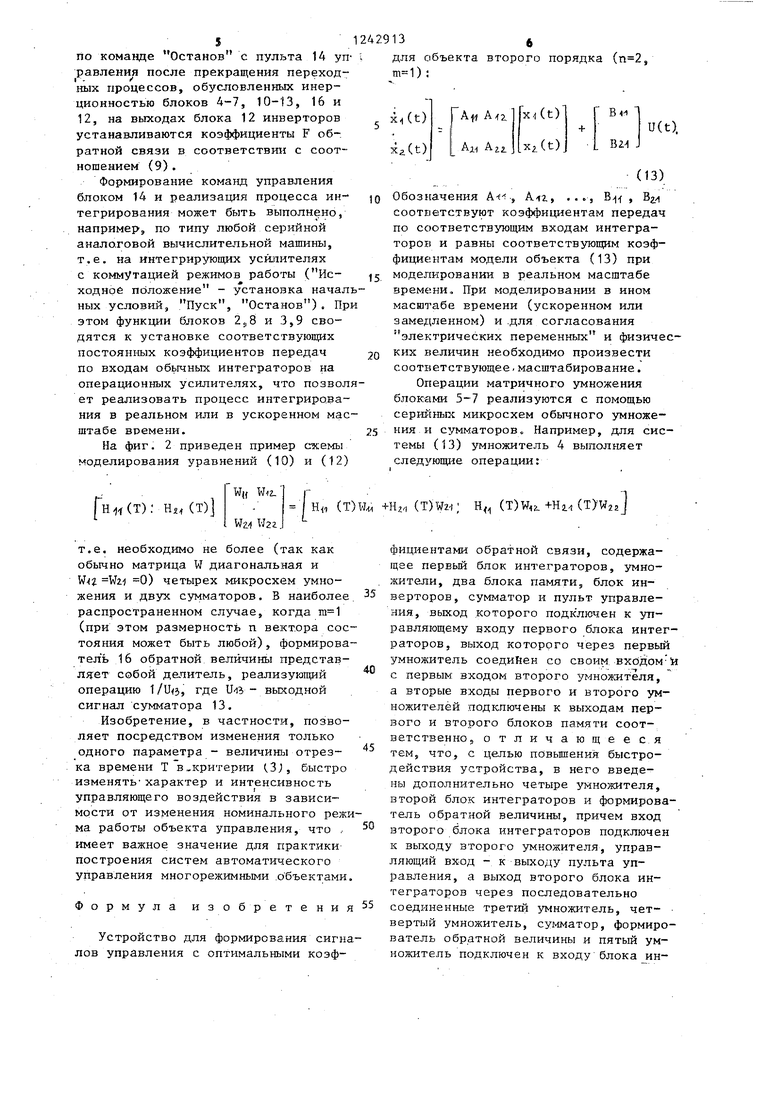
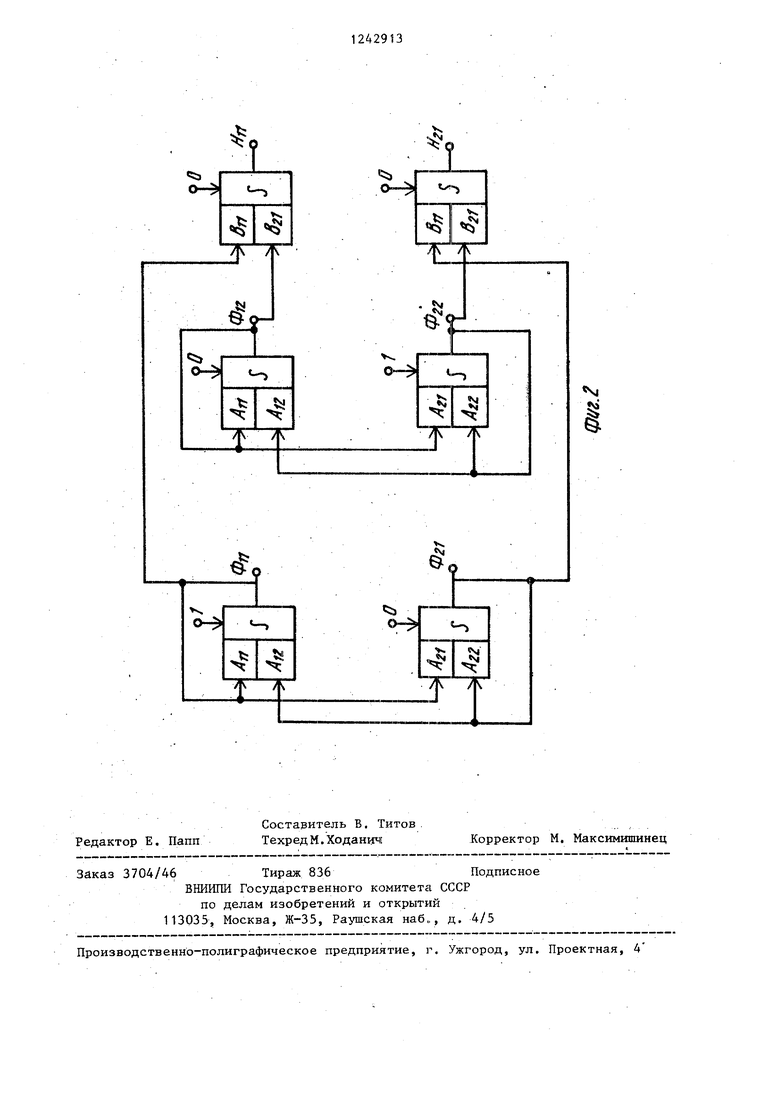
На фиг. 1 приведена функциональная схема устройства; на фиг. 2 - пример схемы моделирования.
Устройство содержит первый блок 1 интеграторов, шесть умножителей 2-7, четыре блока 8-11 памяти, блок 12 инверторов, сумматор 13, пульт 14 управления, второй блок 15 интеграторов и формирователь 16 обратной величины. Выход пульта 14 управления подключен к управляющему входу первого блока 1 интеграторов, выход которого через первый умножитель 2 соединен со своим входом и с первым входом- второго умножителя 3, вторые входы первого 2 и второго 3 умножителей подключены к выходам первого 8 и второго 9 блоков памяти. Вход второго блока 15 интеграторов подключен к выходу второго умножителя 3, управляющий вход - к выходу пульта управления, а выход - через последовательно соединенные третий 4, четвертый 5 умножители, сумматор 13, формирователь 16 обратной величины и пятый умножитель 6 подключен к входу .блока 12 инверторов, выход.первого блока 1 интеграторов через шестой умножитель 7 соединен с вТорым входо пятого умножителя 6, вторые входы третьего 4 и четвертого 5 умножителей подключены к выходам третьего блока 10 памяти и второго блока 15 интеграторов соответственно, второй вход сумматора 13 подключен к выходу четвертого блока 11 памяти, а второй
242913 . . 1
вход шестого умножителя 7 соединен с выходом третьего умножителя 4. Устройство работает следующим образом.
5 В блоке 8 памяти хранятся коэффициенты (п X п) матрицы А, а в блок памяти 9 - коэффициенты (п х т) мат- рии, В, определяющие модель динамики объекта управления, описываемого
10 системой линеаризованных дифференциальных уравнений
15
.x(t)Ax(t)+BU(t) . x(to)xo, t to.
(1)
где x(t) - (пX t) - вектор состояния
системы; U(t) -(); --вектор управления.
Уравнения системы (1) представлены в отклонениях от номинального ре-. жима, так что, как это принято, тре буемое состояние равновесия является нулевым: ,. Мерой отклонения системы (1) от , принимается величина следующей квадратичной формы:
Q(t)x(t) Wx(t)+U(t) RU(t) (2)
где W,R - неотрицательно определенные симмет ричные весовые матрицы, размерностью (п х п) и (т jc т), которые хранятся в блоках 10 и 11 памяти. Формирование векторного сигнала управления U(t) основывается на спе- циа;(1ьной стратегии управления, заключающейся, в Том, что в каждый момент времени t выбирается такое управление U(t), чтобы.в случае его фиксации в течении некоторого отрезка времени Т мера отклонения (2) в момент времени t+T достигала минимума, т.е. чтобы
45
Q(t-HT)x (t-fT) Wx(t+T)-+-u ()RUft:) min,, U(const,,t-+-T.
(3)
При этом управление U может по времени изменяться с произвольной дискретностьюд или быть непрерывным,, в каждый момент времени формируемым из условия (3). Величина отрезка времени Т в критерии (3) определяет требуемую по физическим соображениям жесткость управления и может выбираться, например, по доми
нирующему полюсу разомкнутого та из условия
1 х. 3 .
Если система в момент времени t находится в состоянии x(t), то через отрезок времени Т, т.е. в момент времени t+T, система (1) переходит в состояние, при условии U(t )const, ЛеЬ,
x(t+T)t(T)x(t)(T)0(D ,eft,t+T,
(4)
гдес}5 (Т)-ехр(А Г), н(-Т)
Г exp(At)Bc:iC r f expCAt dtlB. (5)
о . .
В случае, когда рассматриваемая мера отклонения Q(t+T) ми.нимальна, производная квадратичной формы по вектору равна нулю. В соответствии с правилами дифференцирования квадратичных форм по параметру имеем:
) ) („4w)x(t+T)+ и Эи I.W -bw;x.c+i;+
f()U(t)0. (6)
В силу (4) и симметричности матриц W, R имеем
)1 .
эи и vi;,
,
(7)
Подставляя соотношение (7) в (6) с учетом равенства (4), получаем
2H (T)wrcp(T)x(t)+H(T)U(t) +2RU(t)04
4
откуда получаем искомый закон управления
U(t)-(H(T)ra(T)+R) ) (T)x (tjjg
(8)
Таким образом получен закон управления (8) в форме обратной связи с постоянн(з1ми настройками:
55
U(t)Fx (t)
I -lVd) WH(T)(T) w J d), (9
в котором с помощью параметра Т, а также с помощью матриц W и R, осуществляется оперативное изменение качества управления при изменении режимов работы объекта.
Формирование матрицы Я(t) реализуется с помощью блока интеграторов 1 и блоков 2 и 8, которые осуществляют решение матричного дифференциального уравнения
(Г) А ( ь )
(10)
t5
20
25
30 зо
5
0
5
g
5
с начальным условием Ф (о), где I - единична матрица. Решение уравнения
(10)имеет вид
Ф (T)exp(A t), (t1)
Формирование матрицы H(t) осуществляется с помощью блока. 15 интеграторов и блоков 3 и 9, которые реализуют решение магричного уравнения
H(t)) Bclr«iexp(A L)Bd t .(12) о
с нулевыми начальными условиями.
С пульта 4 управления по команде : Исходное положение осуществляется сброс интеграторов 1 и 15 и установка начальных условий. По команде Пуск осуществляется процесс интегрирования и через, время Т по команде Останов о существляется остановка процесса интегрирования и фиксация результата, т.е. в соответствии с
(11)и (12) формирование матриц Р(Т) и Н(Т).
, Функциональное вычисление матрич- ного коэффициента обратной связи F в соответствии с соотношением (9) осуществляется блоками 4-7, 10-13 и 16 -следующим образом. После команды Пуск текущие значения(t) и H(t) поступают на входы умножителей 3, 4 и 6. На выходе умножителя 4 формируются сигналы, пропорциональные H (t) W, на выходе умножителя 7 - H(t) W(t), на выходе умножителя 5 - H (t) WH(t), на выходе сумматора 13 - Н (t) WH(t)+R, а на выходе формирователя 16 обратной величины формируется сигнал С Н ((-) WH(t)+R3 В результате этого после перемножения сигналов блоков 7 и 16 умножителем 6 на выходе блока 12 инверторов формируется текущий матричный коэффициент обрат ной связи. Через интервал времени Т
5.1
по команде Останов с пульта 14 управления после прекращения переход- нъ1х процессов, обусловленных инерционностью блоков 4-7, 10-13, 16 и 12, на выходах блока 12 инверторов устанавливаются коэффициенты F обратной связи в соответствии с соотношением (9) .
Формирование команд управления блоком 14 и реализация процесса интегрирования может быть выполнено, например, по типу любой серийной аналоговой вычислительной машины, т,е, на интегрируюпщх усилителях с коммутацией режимов работы (Исходное положение - установка началь ных условий, Пуск, Останов). При этом функции блоков 2,,8 и 3,9 сводятся к установке соответствующих постоянных коэффициентов передач по входам обьгчных интеграторов на операционных усилителях, что позволя ет реализовать процесс интегрирования в реальном или в ускоренном масштабе времени.
На фиг. 2 приведен пример схемы моделирования уравнений (10) и (12)
W(( IfSii. гт
Гн-)-г(т): ) - н« (T)w,, )W2-i; н (T), (
Т.Т„, Т.7.,(
т.е. необходимо не более (так как обычно матрица W диагональная и W2.) 0) четырех микросхем умножения и двух сумматоров. В наиболее распространенном случае, когда (при этом размерность п вектора состояния может быть любой), формирова- тел ь 16 обратной величины представляет собой делитель, реализуюгций операцию 1 , где Ш. - выходной сигнал сумматора 13.
Изобретение, в частности, позволяет посредством изменения только одного параметра - величин)з1 отрезка времени Т в критерии (3), быстро изменять характер и интенсивность управляющего воздействия в зависимости от изменения номинального режима работы объекта управления, что .. имеет важное значение для практики построения систем автоматического управления многорежимными .о бъектами.
Формула изобретения
Устройство для формирования сигналов управления с оптимальными коэф
2429136
i для объекта второго порядка (, ):
M(t)
х
U(t).
xa(t)
(13)
Обозначения , Ачг, ...5 г.л соответствуют коэффициентам передач по соответствующим входам интеграторов и равны соответствующим коэф- фицие.нтам модели объекта (13) при моделировании в реальном масштабе времени. При моделировании в ином масштабе времени (ускоренном или замедленном) и .для согласования электрических переменных и физических величин необходимо произвести соответствующее.масштабирование. Операции матричного умножения блоками 5-7 реализуются с помощью сери1 ньпс микросхем обычного умножения и сумматоров Например, для системы (13) умножитель 4 выполняет cлeдyющIie операции:
5
0
0
5
5
фициентами обратной связи, содержащее первьй блок интеграторов, умножители, два блока памяти, блок инверторов, сумматор и пульт управления, выход которого подк лючен к управляющему входу первого блока интеграторов, выход которого через первьй умножитель соедийен со своим, вхбдом й с первым входом второго умножителя, а вторые входы первого и второго умножителей подключены к выходам первого и второго блоков памяти соответственно, отличающее с, я тем, что, с целью повышения быстродействия устройства, в него введены дополнительно четыре умножителя, второй блок интеграторов и формирователь обратной величины, причем вход второго блока интеграторов подключен к выходу второго умножителя, управляющий вход - к выходу пульта управления, а выход второго блока интеграторов через последовательно соединенные третий умножитель, чет- вертый умножитель, сумматор, формирователь обратной величины и пятый умножитель подключен к входу блока инверторов, выход первого блока интег- iparopoB через шестой умножитель соединен с вторым входом пятого умножителя, вторые входы третьего и четвертого умножителей подключены к выходам третьего блока памяти и второго
8
блока интеграторов соответственно, второй вход сумматора подключен к выходу четвертого блока памяти, а второй вход шестого умножителя соединен с выходом третьего умно жителя.
фиг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для приема узкополосных телеграфных сигналов | 1987 |
|
SU1587651A1 |
| УСТРОЙСТВО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ОРТОГОНАЛЬНЫХ ФУНКЦИЙ | 2005 |
|
RU2282891C1 |
| Устройство для решения систем уравнений | 1987 |
|
SU1654844A1 |
| Самонастраивающаяся система управления | 1984 |
|
SU1171755A1 |
| Спектральный анализатор случайных сигналов | 1984 |
|
SU1269048A1 |
| Система идентификации колебаний присоединенного к объекту упругого элемента переменной жесткости | 1986 |
|
SU1432457A1 |
| Устройство для решения систем дифференциальных уравнений | 1977 |
|
SU714406A1 |
| Адаптивная антенна | 1988 |
|
SU1700658A1 |
| Самонастраивающаяся система управления | 1981 |
|
SU1008698A1 |
| Система автоматического управления | 1984 |
|
SU1168897A1 |
| Самонастраивающаяся система управления | 1977 |
|
SU650053A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Квакернаак X | |||
| и Сиван Р | |||
| Линейные оптимальные системы управления | |||
| - М.: Мир, 1977, с | |||
| Прибор для измерения угла наклона | 1921 |
|
SU253A1 |
