54) ЭЛЕКТРОМАГНИТНЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ ДАТЧИК
боковых гранях с внешней и внутренней сторон нолюсов магнитопровода.
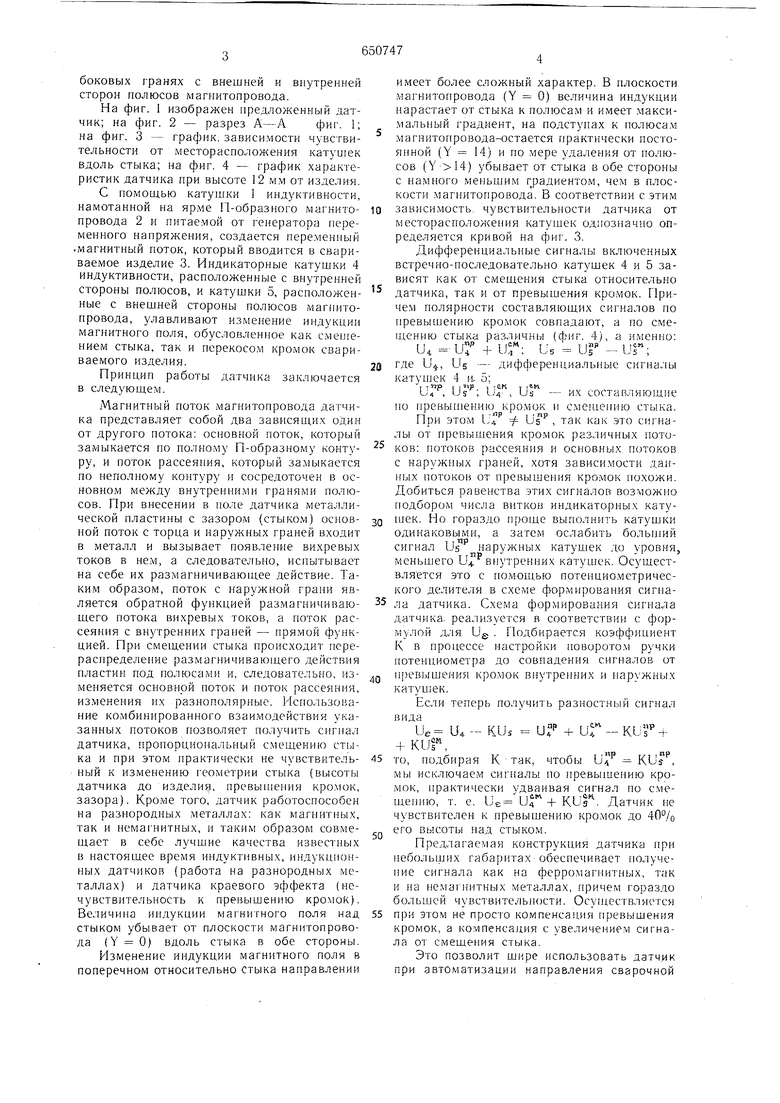
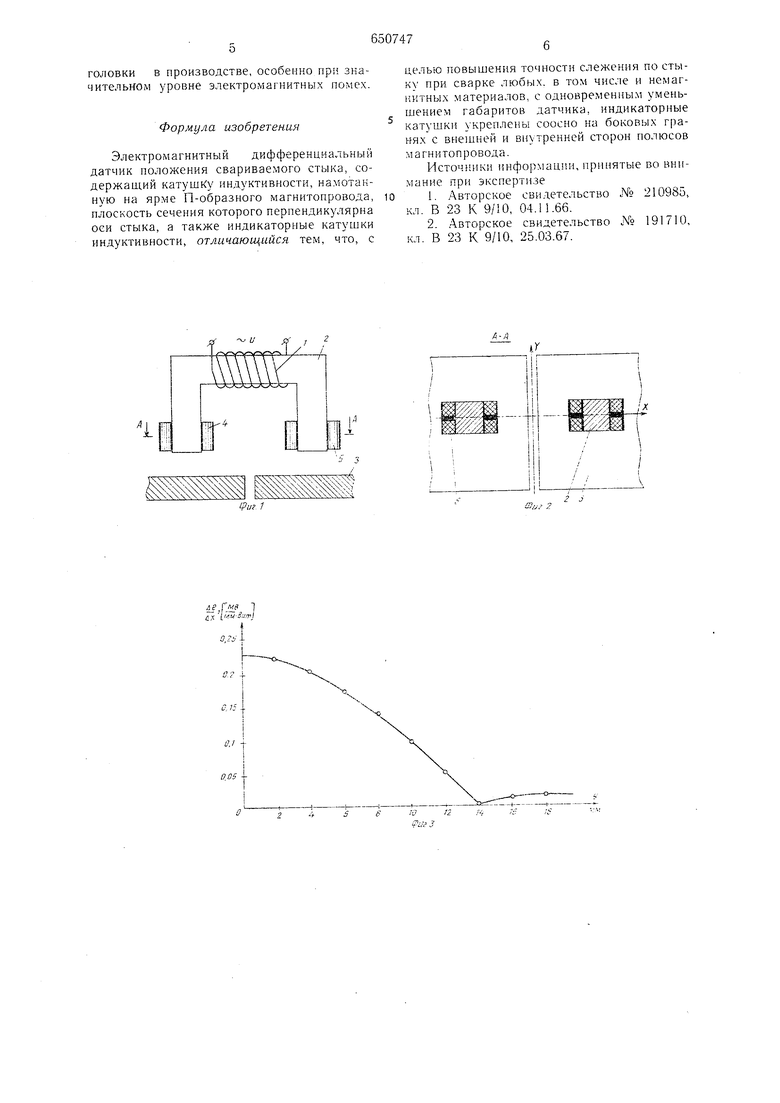
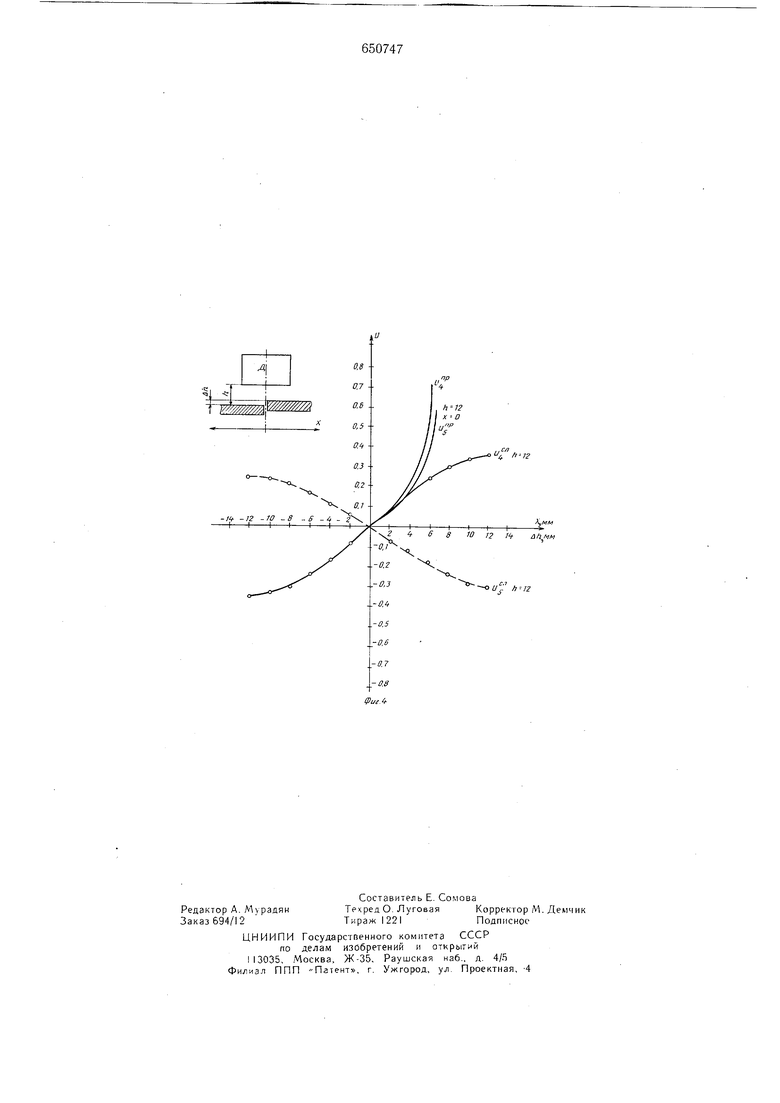
На фиг. 1 изображен нредложенный датчнк; на фиг. 2 - разрез фиг. 1; на фиг. 3 - график, зависимости чувствительности от месторасположения катушек вдоль стыка; на фиг. 4 - график характеристик датчика при высоте 12 мм от изделия.
С помощью катушки 1 индуктивности, намотанной на яр.ме П-образного магнитопровода 2 и питаемой от генератора переменного напряжения, создается пере.менный магнитный поток, который вводится в свариваемое изделие 3. Индикаторные катушки 4 индуктивности, расположенные с внутренней стороны полюсов, и катушки 5, расположенные с внешней етороны полюсов .магпитопровода, улавливают изменение индукции магнитного поля, обусловленное как CMeiiieнием стыка, так и перекосо.м кромок свариваемого изделия.
Принцип работы датчика заключается в следуюш,ем.
Магнитный поток магнитопровода датчика представляет собой два зaв cящиx один от другого потока: основной поток, который замыкается по полному П-образному контуру, и поток рассеяния, который за.мыкается по неполному контуру и сосредоточен в основном между внутренпи.ми гранями полюсов. При внесении в ноле датчика металлической пластины с зазором (стыком) основной поток с торца и наружных граней входит в металл и вызывает появление вихревых токов в не.м, а следовательно, испытывает на себе их размагничивающее действие. Таки.м образом, поток с наружной грани является обратной функцией раз.магничивающего потока вихревых токов, а поток рассеяния с внутренних граней - прямой функцией. При смещении стыка происходит перераспределение размагничивающего действия пластин под полюсами и, следовательно, изменяется основной поток и поток рассеяния, из.менения их разнополярные. Использование комбинированного взаимодействия указанных потоков позволяет получить сигнал датчика, нропорциопальный с.мещению стыка и при этом практически не чувствительный к изменению геометрии стыка (высоты датчика до издели5, превьипения кромок, зазора). Кроме того, датчик работоспособен на разнородных металлах: как магнитных, так и немагнитных, и таким образом совмещает в себе лучшие качества известных в настоящее время индуктивных, индукционных датчиков (работа на разнородных металлах) и датчика краевого эффекта (нечувствительность к превышению кромок). Величина индукции магнитного поля над стыком убывает от плоскости магнитопровода (Y 0) вдоль стыка в обе стороны.
Изменение индукции магнитного поля в поперечном относительно стыка направлении
имеет более сложный характер. В плоскости магнитопровода (Y 0) величина индукции нарастает от стыка к полюса.м и имеет .макси.мальный градиент, на подступах к полюсам магнитонровода-остается практически постоянной (Y 14) и по .мере удаления от нолюсов (У 14) убывает от стыка в обе стороны с на.много .меньшим градиентом, чем в плоскости магпитопровода. В соответствии с этим
зависи.мость. чувствительности датчика от месторасполо сения катушек однозначно определяется кривой на фиг. 3.
Дифференциальные сигналы включенных встречно-последовательно катушек 4 и 5 зависят как от смещения стыка относительно
датчика, так и от превышения кро.мок. Причем полярности составляющих сигналов по превышению кромок совпадают, а по смешению стыка оазличны (фиг. 4), а именно:
III . I ii. I 1
(J U.J, -1- 1л- , Us Us - bs ,
где LJ, Us - дифференциальные сигналы катушек 4 и, 5;
. т Пр J у 21Р I .UK т г
IJ4 , Us ; , Us - их составляющие по превышению кромок и смещению стыка. При этом и Г т Us , так как это сигналы от превышения кро.мок различных потоков: потоков рассеяния и основных потоков с наружных граней, хотя зависимости данных потоков от превышения кро.мок похожи. Добиться равенства этих сигналов возможио подбором числа витк:ов индикаторных кату иек. Но гораздо проще выполнить катущки одинаковыми, а затем ослабить больн ий сигнал Us наружных катушек до уровня, меньшего U внутренних катушек. Осуществляется это с но.мощью потенциометрического делителя в схеме формирования сигпала датчика. Схема формирования сигнала датчика- реа.1изуется в соответствии с формулой для и . Г1олТ,бирается коэффициент К в процессе настройки поворото.м ручки потенциометра до совпадения сигналов от
н)евыщеиия кромок внутренних и наружных катуп ек.
Если теперь получить разностный сигнал вида
Ue U4 - KUs - uf + иГ-киГ-f+ KUf-,
то, подбирая К так, чтобы U. KUs , мы исключаем сигналы по превышению кромок, практически удваивая сигнал по смещепию, т. е. Ue U4 + KUg. Датчик не чувствителен к превышению кромок до 40% его высоты над стыком.
Предлагаемая конструкция датчика нри небольших габаритах обеспечивает получение сигнала как на ферромагнитных, так и на 1емагнитных металлах, приче.м гораздо большей чувствительности. Осуществляется при этом не просто компенсация превышения кромок, а компенсация с увеличением сигнала от смещения стыка.
Это позволит щире использовать датчик при автоматизации направления сварочной головки в производстве, особенно при. значительном уровне электромагнитных помех. Формула изобретения Электромагнитный дифференц.ча,дьный датчик положения свариваемого стыка, содержащий катушКу индуктивности, на.мотанную на ярме П-образного магнитопровода, плоскость сечения которого перпендикулярна оси стыка, а также индикаторные катушки индуктивности, отличающийся тем, что, с 6 7 целью повышения точности слежения по стыку при сварке любых, в том числе и немагlUiTHbix материалов, с одновременным уменьшением габаритов датчика, индикаторные катушки укреплены соосно на боковых гранях с внеидней и внутренней сторон полюсов магнитопровода. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство № 210985, кл. В 23 К 9/10, 04.11.66. 2.Авторское свидетельство X9 191710, кл. В 23 К 9/10, 25.03.67.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитный дифференциальный датчик положения свариваемого стыка | 1983 |
|
SU1166941A1 |
| Электромагнитный дифференциальный датчик положения свариваемого стыка | 1980 |
|
SU899295A1 |
| Электромагнитный датчик для слежения за свариваемым стыком | 1974 |
|
SU556910A1 |
| Устройство для автоматического направления электрода по стыку | 1977 |
|
SU742063A1 |
| Электромагнитный дифференциальный датчик | 1984 |
|
SU1234101A1 |
| ИНДУКЦИОННЫЙ ДАТЧИК | 1997 |
|
RU2125276C1 |
| Электромагнитный дифференциальный датчик положения свариваемого стыка | 1988 |
|
SU1593821A1 |
| Комбинированный электромагнитныйдАТчиК | 1978 |
|
SU821091A1 |
| Устройство для измерения полезной мощности индуктора | 1986 |
|
SU1388814A2 |
| Бесконтактный комбинированный дифференциальный датчик | 1971 |
|
SU454974A2 |
1риг 1
А-Д
0.1 -JO -8 ..Б - -
0.8 0.7 0.6 0,5 O.ti
4 A , 0.3 0.2
