Изобретение относится к машиностроению и может быть использовано для снижения вибраций корпусов роторных механизмов, установленных на подвижных объектах, например судах.
Известно виброизолирующее устройство для крепления подшипника в корпусе механизма с помош,ью нелинейных упругих элементов, расположенных в кольцевом пространстве между корпусом и подшипником 1.
Однако это устройство не обеспечивает одновременно надежную центровку вала- и эффективную виброизоляцию корпуса при установке роторных механизмов на подвижных объектах, например судах. Объясняется это тем, что при возвратно-поворотных движениях (наклонах) корпуса вокруг своей продольной оси или оси, ей параллельной, для выполнения требований по расцентровке вала нелинейные упругие элементы опоры приходится выбирать жесткими. Эти эле менты в условиях воздействия на них весовой нагрузки не обеспечивают достаточно низких значений собственных частот амортизированного ротора, необходимых для его хорошей виброизоляции.
Цель изобретения .- повышение эффективности устройства путем обеспечения разгрузки нелинейных упругих элементов и компенсации вибрационных усилий, действуюш,их со стороны подшипника на корпус через эти упругие элементы.
Для этого виброизолируюшее устройство снабжено двумя парами силовозбудителей, расположенных взаимно перпендикулярно, двумя датчиками расцентровки вала, paciioлон енными по направлениям взаимодействия пар силовозбудителей с подшипником, и двумя блоками управления, каждый из которых соединен с одной из пар силовозбудителей и соответствующим этой паре датчиком расцентровки вала.
5
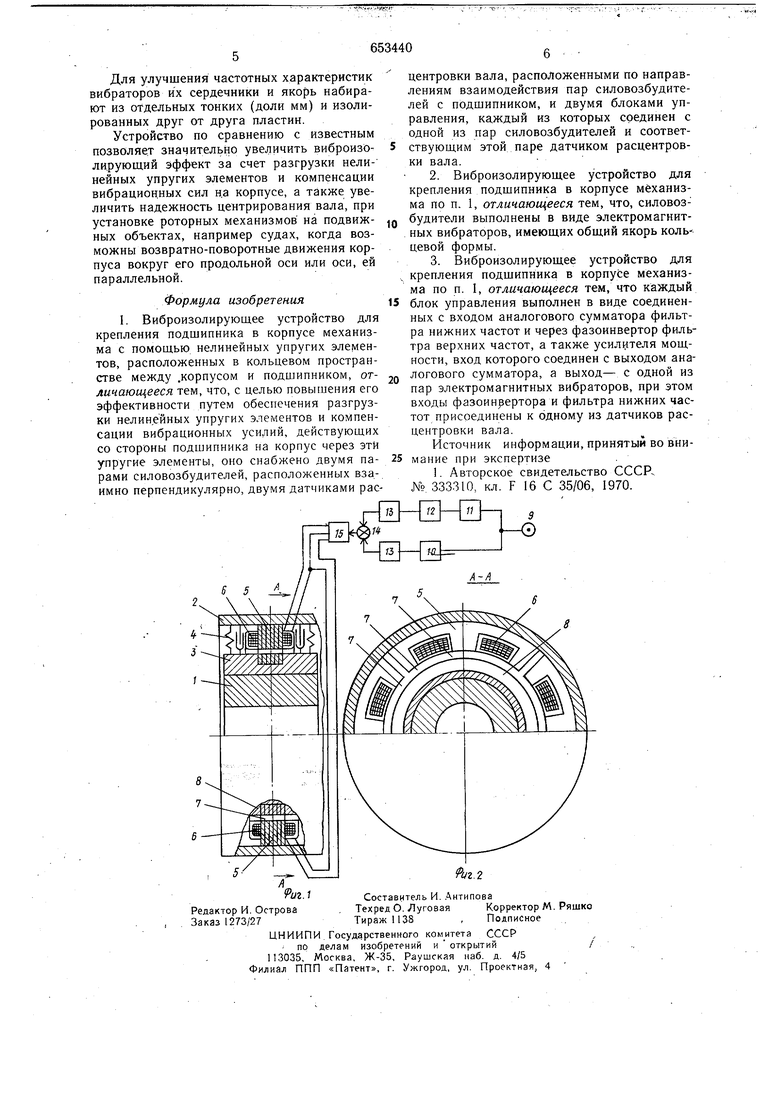
Кроме того, силовозбудители могут быть выполнены в виде электромагнитных вибра. торов, имеющих общий якорь кольцевой формы, а каждый блок управления может быть выполнен в виде соединенных с входом аналогового сумматора фильтра нижних частот и через фазоинзертор фильтра верхних частот, а также усилителя мощности, вход которого соединен с выходом аналогового сумматора, а выход - с одной из пар электромагнитных вибраторов, при этом входы фазоинвертора и фильтра нижних частот присоединены К одному из датчиков расцентровки вала. На фиг. 1 изображено предлагаемое вибрационное устройство, продольный разрез, и схема блока управления; на фиг. 2 разрез А-А фиг. IV Виброизолирующее устройство для крепления подшипника 1 в корпусе 2 механизма содержит втулку 3, взаимодействующую с корпусом через нелинейные упругие элементы 4. Кроме того, оно снабжено двумя парами электромагнитных вибраторов, сердечники 5 с катушками 6 которых жестко крепятся в радиальной плоскости симметрии опоры к корпусу 2 с его внутренней стороны по двум взаимно перпердикулярным направлениям и взаимодействуют поэтим направлениям через воздушные зазоры 7 с кольцевым якорем 8, выполненным в виде соосноустановленной на втулке цилиндрической .обоймы, состоящей из отдельных плоских колец из магнитомягкого материала. Устройство снабжено также двумя датчиками расцентровки вала 9 (например, датчиками перемещения втулки 3 относительно корпуса 2 по направлениям действия каждой пары вибраторов), выход каждого из которых подключен непосредственно к фильтру верхних .частот 10 и через фазоинвертор 1 - к фильтру нижних частот 12, а выходы фильтров через усилители 13 соединены с входами аналогового сумматора 14, к выходу которого .подключен вход усилителя мощности 15 с двухтактным выходом, соединенным катушками возбуждения одной из пар сердечников по схеме включения обмоток вибра тора дифференциального типа. Датчик относительного перемещения, втулки по горизонтали,а также остальные элементы цепи формирования управляющего сигнала для горизонтальной пары вибраторов на чертеже не показаны. Устройство работает следующим образом. При выключенных цепях управления уст ройство работает как известное. При включ Нии цёпи управления; отсутствии наклона -корпуса И неподвижном роторе на выходе датчика 9 появляется напряжение, величина которого пропорциональна смещению втулки 3 от соосного с корпусом 2 положения (определяется статической деформацией упругих элементов 4 под воздействием вес.овой нагрузки), а знак отражает направление перемещения втулки. Выходное напряжение датчика 9 через фазоинвертор 11, фильтр нижних частот 12, усилитель 13 и СумматЬр 14 подается на усилитель мощности 15, в результате чего ток в катушке верхнего сер- 55 дечника увеличивается, а нижнего - уменьшается. Это приводит к появлению вертикальной силы взаимодействия между ссрдечниками (корпусом) и якорем (валом), которая уменьшает возникшую расцентровку вала до величины, определяемой динамической точностью канала вертикальной стабилизации. При включенных цепях управления, неподвижном роторе и возвратно-поворотных движениях корпуса вокруг своей продольной оси или оси, ей параллельной, одновременно аналогично работают каналы вертикальной и горизонтальной стабилизации вала. Процесс стабилизации (центрирования) вала сопровождается уменьигением статической деформации нелинейны упругих элементов, что приводит к снижению их динамической жесткости и, как следствие, к повышению виброизолирующей способности устройства. Для устранения стабилизирующих (ужесточающих подвеску ротора) воздействий в диапазоне вибрации параметры фильтров нижних частот выбираются так, чтобы их частоты среза были значительно меньше, чем минимальная частота вибрационного спектра. При вращении ротора на выходе датчиков 9, кроме квазистатических составляющих сигнала, определяемых поворотными движениями корпуса, образуются составляющие, пропорциональные вибрационным перемещениям втулки, вызванным вращением неуравновешенного ротора. Эти составляющие с частотой оборотов ротора и ее гармоник поступают на входы фильтров верхних частот 10, где происходит их отделение От квазистатических составляющих сигнала. После усиления выходных сигналов фильтров верхних частот в усилителях 13, они через сумматорь 14 подаются на входы усилителей мощности 15, изменяя токи в катушках сердечников так, что возникающие при этом силы взаимодействия, между сердечниками 5 и кольцевым якорем 8 частично компенсируют вибрационные усилия, передаваемые на корпус колеблющейся втулкой через упругие элементы устройства. В результате уменьшения амплитуды возмуща.ющих корпус усилий его вибрации снижаются. В качестве датчиков расцентровки вала могут быть использованы электромеханические динамометры, измеряющие усилия, передаваемые упругими элементами на корпус в направлениях действия пар вибраторов на втулку. При этом компенсация вибрационных сил на корпус может быть более полной, так как система управления устройства контролирует и снижает не только упругую составляюшую вибрационных сил, как это имело место при использовании датчиков смещения, но и демпфирующую.
| название | год | авторы | номер документа |
|---|---|---|---|
| Виброизолирующая опора | 1979 |
|
SU830031A1 |
| Виброизолирующая опора вала | 1980 |
|
SU896278A1 |
| Опора вала | 1976 |
|
SU607071A2 |
| Электромагнитный вибратор | 1988 |
|
SU1598064A1 |
| ВОЗБУДИТЕЛЬ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2008 |
|
RU2440660C2 |
| Амортизатор с автоматическим управлением | 1977 |
|
SU771381A2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ВИБРАТОР | 2005 |
|
RU2292960C2 |
| Биомеханическое устройство для тренировки тяжелоатлетов | 1988 |
|
SU1567225A1 |
| Самонастраивающийся амортизатор | 2018 |
|
RU2696150C1 |
| Опора вала | 1976 |
|
SU607067A1 |
