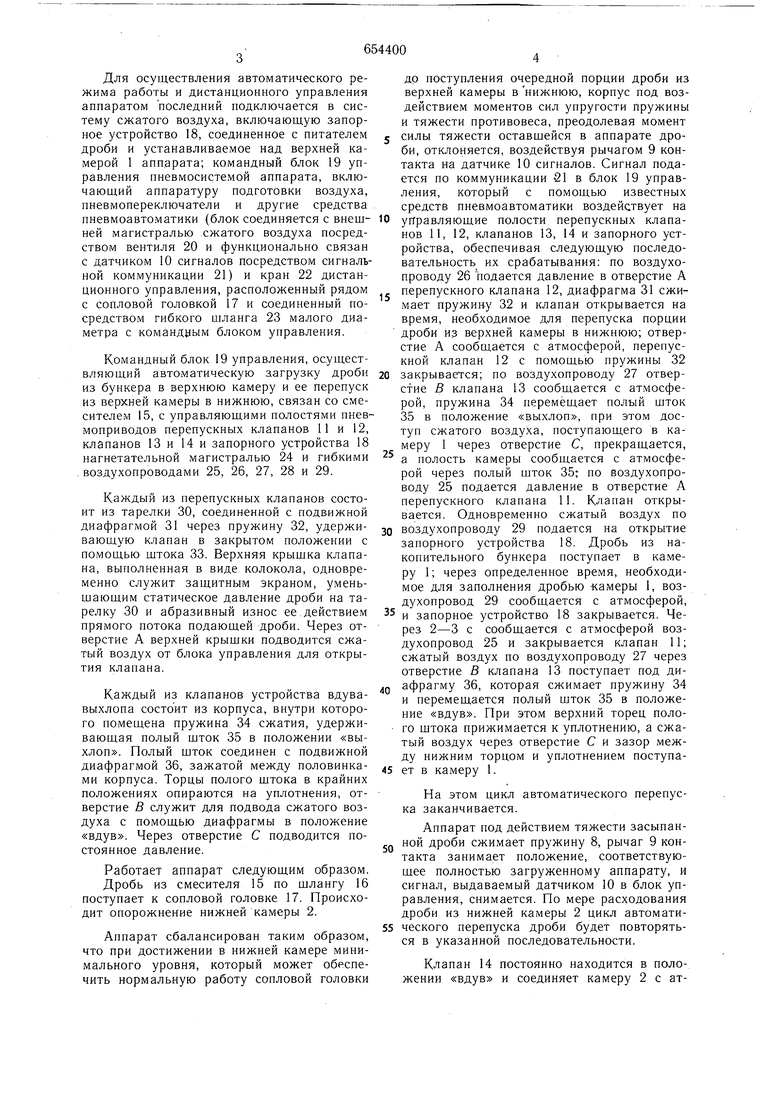
Изобретение относится к области дробест руйной обработки деталей и может быть использовано в различных отраслях промышленности. Известны аппараты очистные дробеструйные непрерывного действия двухкамерные с автоматической систе.мой регулирования засыпкой дроби, осуш:ествляемой путем перемещения корпуса аппарата в зависимости от веса дроби. Недостатком его является сложность конструкции. С целью упрощения конструкции аппарат установлен с возможностью качания относительно оси его крепления посредством рычажно-весовой систе.мы. На фиг. I схематически изображен предложенный аппарат, общий вид; на фиг. 2 - перепускной клапан в положении «закрыто ; на фиг. 3 - клапан устройства вдува-выхлопа в положении «выхлоп. Аппарат состоит из корпуса, выполненного в виде сочленения двух ка.мер - верхней 1 и нижней 2, который крепится на раме 3 с помощью шарнирной подвески 4 таким образом, что ось 5 подвески имеет смещение относительно центра тяжести корпуса, вследствие чего последний может занимать два фиксированных положения в зависи.мости от количества (уровня) дроби в его ка.мерах. С корпусом аппарата жестко соединены и расположены в диаметрально противоположных направлениях от оси 5 подвески; с одной стороны противовес, включающий в себя штангу 6 со свободно перемещаемым и фиксируемым в нужном положении грузом 7, и, с другой стороны, пружинная опора, включающая в себя пружину 8 сжатия и рычаг 9 контакта, под которым расположен датчик 10 сигналов. Верхняя и нижняя ка.меры аппарата в своей верхней части снабжены одинаковыми по конструкции перепускными клапанами 1 1 и 12 для перепуска дроби в верхнюю камеру и из верхней камеры в нижнюю. В стенки обеих камер вмонтированы одинаковой конструкции клапаны 13, 14 устройства вдува-выхлопа для сжатого воздуха. В нижней части камеры 2 расположен смеситель 15, соединенный гибким шлангом 16 с сопловой головкой 17. Для осуществления автоматического режима работы и дистанционного управления аппаратом последний подключается в систему сжатого воздуха, включающую запорное устройство 18, соединенное с питателем дроби и устанавливаемое над верхней камерой 1 аппарата; командный блок 19 управления пневмосистемой аппарата, включающий аппаратуру подготовки воздуха, пневмопереключатели и другие средства пневмоавтоматики (блок соединяется с внещней магистралью сжатого воздуха посредством вентиля 20 и функционально связан с датчиком 10 сигналов посредством сигнальной коммуникации 21) и кран 22 дистанционного управления, расположенный рядом с сопловой головкой 17 и соединенный посредством гибкого щланга 23 малого диаметра с командным блоком управления. Командный блок 19 управления, осуществляющий автоматическую загрузку дроби из бункера в верхнюю камеру и ее перепуск из верхней камеры в нижнюю, связан со смесителем 15, с управляющими полостями пневмоприводов перепускных клапанов 11 и 12, клапанов 13 и 14 и запорного устройства 18 нагнетательной магистралью 24 и гибкими ,воздухопроводами 25, 26, 27, 28 и 29. Каждый из перепускных клапанов состоит из тарелки 30, соединенной с подвижной диафрагмой 31 через пружину 32, удерживающую клапан в закрытом положении с помощью щтока 33. Верхняя крыщка клапана, выполненная в виде колокола, одновременно служит защитным экраном, уменьщающим статическое давление дроби на тарелку 30 и абразивный износ ее.действием прямого потока подающей дроби. Через отверстие А верхней крыщки подводится сжатый воздух от блока управления для открытия клапана. Каждый из клапанов устройства вдувавыхлопа состоит из корпуса, внутри которого помещена пружина 34 сжатия, удерживающая полый щток 35 в положении «выхлоп. Полый щток соединен с подвижной диафрагмой 36, зажатой между половинками корпуса. Торцы полого щтока в крайних положениях опираются на уплотнения, отверстие В служит для подвода сжатого воздуха с помощью диафрагмы в положение «вдув. Через отверстие С подводится постоянное давление. Работает аппарат следующим образом. Дробь из смесителя 15 по щлангу 16 поступает к сопловой головке 17. Происходит опорожнение нижней камеры 2. Аппарат сбалансирован таким образом, что при достижении в нижней камере минимального уровня, который может обеспечить нормальную работу сопловой головки до поступления очередной порции дроби из верхней камеры в нижнюю, корпус под воздействием моментов сил упругости пружины и тяжести противовеса, преодолевая момент силы тяжести оставщейся в аппарате дроби, отклоняется, воздействуя рычагом 9 контакта на датчике 10 сигналов. Сигнал подается по коммуникации 21 в блок 19 управления, который с помощью известных средств пневмоавтоматики воздействует на уггравляющие полости перепускных клапанов 11, 12, клапанов 13, 14 и запорного устройства, обеспечивая следующую последовательность их срабатывания: по воздухопроводу 26 подается давление в отверстие А перепускного клапана 12, диафрагма 31 сжимает пружину 32 и клапан открывается на время, необходимое для перепуска порции дроби из верхней камеры в нижнюю; отверстие А сообщается с атмосферой, перепускной клапан 12 с помощью пружины 32 закрывается; по воздухопроводу 27 отверстие В клапана 13 сообщается с атмосферой, пружина 34 перемещает полый щток 35 в положение «выхлоп, при этом доступ сжатого воздуха, поступающего в камеру 1 через отверстие С, прекращается, а полость камеры сообщается с атмосферой через полый щток 35; по воздухопроводу 25 подается давление в отверстие А перепускного клапана 11. Клапан открывается. Одновременно сжатый воздух по воздухопроводу 29 подается на открытие запорного устройства 18. Дробь из накопительного бункера поступает в камеру 1; через определенное время, необходимое для заполнения дробью «амеры 1, воздухопровод 29 сообщается с атмосферой, и запорное устройство 18 закрывается. Через 2-3 с сообщается с атмосферой воздухопровод 25 и закрывается клапан 11; сжатый воздух по воздухопроводу 27 через отверстие В клапана 13 поступает под диафрагму 36, которая сжимает пружину 34 и перемещается полый щток 35 в положение «вдув. При этом верхний торец полого щтока прижимается к уплотнению, а сжатый воздух через отверстие С и зазор между нижним торцом и уплотнением поступает в камеру 1. На этом цикл автоматического перепуска заканчивается. Аппарат под действием тяжести засыпанной дроби сжимает пружину 8, рычаг 9 контакта занимает положение, соответствующее полностью загруженному аппарату, и сигнал, выдаваемый датчиком 10 в блок управления, снимается. По мере расходования дроби из нижней камеры 2 цикл автоматического перепуска дроби будет повторяться в указанной последовательности. Клапан 14 постоянно находится в положении «вдув и соединяет камеру 2 с атмосферой только при отключении аппарата от магистрали сжатого воздуха.
Формула изобретения
Аппарат очистной дробеструйный непрерывного действия двухкамерный с автоматической системой регулирования засыпкой
дроби, осуществляемой путем перемещения корпуса аппарата в зависимости от веса дроби, отличающийся тем, что, с целью упрощения конструкции, аппарат установлен с возможностью качания относительно оси его крепления посредством рычажно-весовой системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Дробеструйный аппарат | 1985 |
|
SU1310185A1 |
| Двухкамерный дробеструйный аппарат | 1987 |
|
SU1701502A1 |
| Устройство для глубокого внесения в почву наполнителей или минеральных удобрений | 1987 |
|
SU1523081A1 |
| Двигатель внутреннего сгорания | 1981 |
|
SU1010308A1 |
| Рыхлитель мерзлых грунтов | 1974 |
|
SU613032A1 |
| Питающая часть пневматической системы транспортного средства | 1982 |
|
SU1115948A1 |
| Трехвальный газотурбинный двигатель | 1990 |
|
SU1768766A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1973 |
|
SU395247A1 |
| Устройство подачи воздуха к пневмостартеру | 1973 |
|
SU456090A1 |
| Клапанный воздухораспределитель | 1980 |
|
SU908396A1 |
37
Пг/г. 2
3«
Риг.З
