1
Изобретение относится к области автоматики и может быть использовано в частности для управления транспортным механизмом гальваноавтомата по зёцханной программе.
Известно устройство для автоматического управления транспортным механизмом, содержащее блок адресов ячеек, блок считьгаания адреса, блок преобразования кода, блок адресования, блок сигнала останова, блок определения положения транспортного мехнизма, блок определения направления движения транспортного механизма, исполнительный блок, модель рядов ячеек и блок переключения модели рядов ячеек 1. Это устройство MMeei; низкую надежность вследствие появления ложных импульсов, вызываю.цих ошибки адресования. Причем с. увеличением числа ячеек адресования вероятность возникновения случайных ошибок возрастает.
. Наиболее близким решением из известных является устройство для программного управления, содержащее последовательно соединенные позиционный датчик, элемент ИЛИ, первый .элемент И, блок сравнения и блок управления приводом, блок ввода прогрс1кмы
подключенный к блоку сравнения, триггер и счетчик, соединенные с первым элементом И 2.
Недостатком указанного устройства является его низкая надежность.
Целью настоящего изобретения является повышение надежности устрой ства.
Поставленная цель достигается тем, что в устройство введены генератор импульсов и последовательно соединенные преобразователь кода, компаратор, дешифратор и второй элемент И, выход которого подключен через триггер к преобразователю кода, первому элементу И и дешифратору, а другой вход через генератор импульсов и блок управления приводом - к первому и второму выходаи блока сравнения, / второй и третий выходы которого соединены с первым и вторьал входами преобразователя кода, выход генератора импульсов через счетчик подключен к другому входу компаратора, а. второй выход дешифратора соединен со вторым входом элемента ИЛИ.
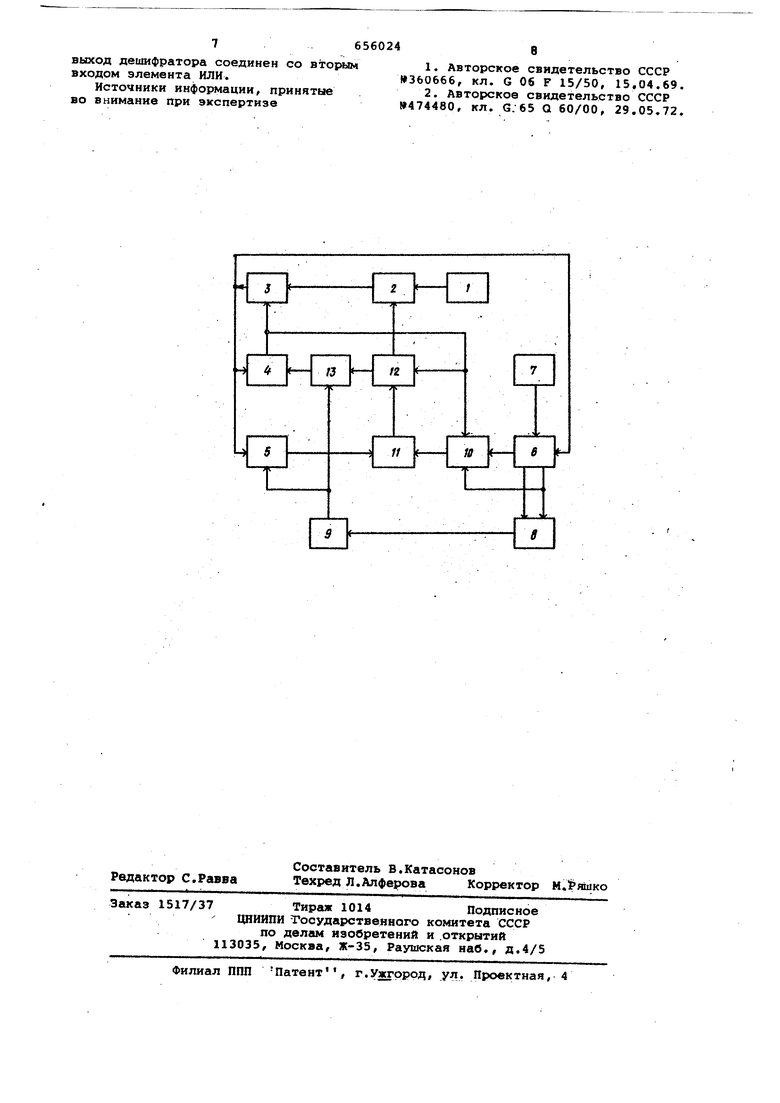
На чертеже представлена блок-схема устройства. Устройство содержит позиционный датчик 1, элемент ИЛИ 2, первый элемент И 3, триггер 4, счетчик 5, блок 6 сравнения, блок ввода программы, блок 8 управления приводом, генератор 9 импульсов, преобра зователь 10 кода, компаратор И., де шифратор 12 и второй элемент И 13. Устройство работает следующим образом. При движенди транспортного механизма в любом направлении позиционный датчик 1 вырабатывает в момент прохождения путевого упора импульс который через первый вход элемента ИЛИ 2 поступает на первый вход элемента И 3, на второй вход.которого поступает сигнал с в.ыхода триггера При этом сигнал,равный единице, на втором входе элемента ИЗ появляется по времени раньше,, чем появляется сигнал на его первом входе и сохраняется в течение небольшого промежутка времени до появления импульса на первом входе.Максимальн возможное значение этого промежутка времени названо зоной ожидания по-, зиционного импульса, формирование которой осуществляется триггером 4. Передняя граница зоны ожидания позиционного импульса соответствует нахождению транспортного механизма на некотором расстоянии от путевого yriopa, если отсчет нести по ходу движения транспортного механизма, а задняя - после путевого упора. При нахождении транспортного механизма за пределами зоны ожидания позиционного импульса сигнал на втором входе элемента И 3 равен нулю. Ширина зоны ожидания позицион ного импульса для каждого путевого упора может быть различной. Наличие сигналов на обоих входах элемента и 3 приводит к формиро ванию сигнала на его выходе, которы поступает на первые входы триггера 4, счетчика 5 и блока 6 сравнения, причем триггер 4 переключается в со тояние, когда на его выходе сигнал становится равным нулю, счетчик 5 сбрасывается в исходное нулевое сос тояние, а в блоке б сравнения изменяется на единицу значенде двоичног к-разрядного числа, представляющего собой код текущего адреса транспорт ного механизма. На второй вход блок б сравнения поступает изблока 7 вв да программы код адреса следования транспортного механизма, представля щий также двоичное к-разрядное числ который сравнивается с кодом текуще ,го адреса. При этом/ если указанны . коды имеют одинаковые значения, то на первом выходе блока 6 сравнения возникает сигнал в виде единицы, ко торый поступает на блок 8 управлени приводом транспортного механизма |и останавливае.т его. Если код теку щего адреса меньше кода адреса следования, то на первом и втором выходах блока 6 сравнения сигналы равны нулю. Такое сочетание сигналов воспринимается блоком 8 управления приводом в виде команды транспортному механизму для перемещения вперед. Если код текущего адреса больше кода адресаследования, то на первом выходе блока 6 ср,авнения сигнал равен нулю, а на втором - единице, что соответствует команде транспортному механизму для перемещения назад. При поступлении команды для движения транспортногомеханизма вперед или назад происходит одновременно запуск генератора 9 импульсов, который отключается, если транспортный механизм останавливается, В преобразователе 10 кода, на первый вход которого поступает двоичный сигнал с выхода триггера 4, на в торой вход - двоичный сигнал со второго выхода блока 6 сравнения, а на третий вход - код текущего адреса трансдортного механизма с третьего выходаблока б сравнения, формируется (k+2)разрядное число, при этом первый (младший) разряд (k+2)-разрядного числа формируется с помощью сигнала, поступающего с выхода триггера 4, второй разряд - с помощью сигна- ла, поступающего со второго выхода блока 6 сравнения, а остальные«разряды представляют код текущего адреса транспортного механкзма. -Преобразователь 10 кода осуществляет, операцию преобразования кода (К+2)разрядного числа в код нового р-разрядного числа, который соответствует передней или задней границе зоны ожидания позиционного импульса. При этом, если сигналы с выхода триггера 4 и второго, выхода блока б сравнения равны нулю, то код (k+2)-разрядного числа преобразуется в код р-разрядного числа, соответствующего передней границе зоны ожидания позиционного импульса для путевого упора, расположенного справа от транспортного механизма, т.е. при его движении вперед. Если эти сигналы равны соответственно единице и нулю, то код (k+2)-разрядного числа преобразуется в код р-разрядного числа, соответствующего задней границе той же зоны ожидания позиционного импульса. В случае, когда сигналы с выхода триггера 4 и второго выхода блока 6 сравнения равны соответственно нулю и единице, то.код (k+2)-разрядного числа преобразуется р-разрядног го чи ел а, COOT в ет ст ву юща го пер едн ей границе зоны ожидания позиционного импульса для путевого упора,расположенного слева от транспортного механизма, т .е. при его движении назад.Наконец, если эти сигналы равны единице,то код (k+2)-разрядного числа преобразуется в код р-разрядного числа,соотве ствующего задней границе той же зоны ожидания поцизионноГо импульса.Код п редней или задней границы зоны ожида ния позиционного импульса поступает на первый вход компаратора 11. Матрица преобразования преобразователя 10 кода выбирается в зависимости от расстояний между упор.ами, которые могут быть как постоянными, так и переменными. Генератор 9 импульсов, который запускается с помощью сигнала, поступающего на его вход с блока 8 управления приводом в момент, соответствую щий началу движения транспортного мехайизма, вырабатывает последователь ность мехпозидионных импульсов, приче цена каждого импульса равна единице расстояния, а их общее количество про порционально расстоянию, пройденному транспортным механизмом. Эти импульсы поступают для подсчета на второй Ксчетный) вход счетчика 5 импульсов, поэтому на его выходе появляется код р-разрядного двоичного числа. Этот код поступает на второй вход компаратора 11. Если этот код равен коду передней границы зоны ожидания позиционного импульса, поданного на neipBb вход компаратора 11, то на его выходе появляется сигнал в виде единицы, который noc iynaeT н второй вход дешифратора 12, на первом входе которого в этот момент имеется с выхода триггера 4 сигнал, равный нулю. Указанное сочетание входных сигналов воспринимается дешифратором 12 таким образом, что на его выходе, подключенном к первому входу элемента И 13 появляется сигнал,равный единице. На втором входе элемента И 13 также имеется сигнал от генератора 9 импульсов поэтому на выходе элемента И 13 возникает сигнал, который переключает триггер 4 в состояние, когда на его выходе устанавливается сигнал единица, который подготавливает по второму входу блок 3 совпадения к работе. Теперь, если на первый вход блока 3 совпадения поступит позиционный импульс, то он произведет описанные выше операции в триггере 4, счетчике 5 импульров и в блоке б сравнения т.е. триггер 4 переключается в состоя ние, когда на его выходе сигнал становится равным нулю, счетчик 5 импульсов срабатывается в исходное нуле вое состояние, а в блоке 6 сравнения изменяется на единицу значение .текущего адреса транспортного механизма. В случае, когда блок 3 совпадения подготовлен к работе, но перед появлением импульса позиционного датчика 1 роступит достаточно мощный сигнал помехи, то он будет воспринят блоком 3 совпадения как позиционный импульс 46 Однако сбоя в работе устройства от оэиционного импульса не произойдет, так как блок 3 совпадения после прохождения сигнала помехи будет закрыт по .второму входу сигналом/равным нулю до подхода транспортного механизма к следующему путевому упору. В случае, если позиционный датчик 1 не срабатывает, то, в связи с тем, что на первом входе преобразователя 10 кода имеется в этот момент с выхода триггера 4 сигнал/ равный единице,произойдет сравнение кодов ц компараторе 11 до задней границы зоны ожидания позиционного импульса. В этом случае на первом и втором входах дешифратора 12 появятся сигналы, равные единице, что приведет к возникно.вению сигнала на.-, . его выходе, подключенном ко второму входу элемента ИЛИ 2. Этот сигнал через элемент ИЛИ поступает на первый вход блока 3 ровпадения и воспринимается им как сигнал от позиционного датчика 1. Поэтому сббя в работе устройства также не произойдет. . Использование предлагаемого устройства,обладающего высокой помехозащищенностью и надежностью в работе, обеспечивает возможность программного управления транспортным механизмом гальваноавтомата с различным шагом перемещения между путевй 1И упорами, при этом позволяет устранить ошибки адресования транспортного механизма, обусловленные отказом позиционного датчика или появлением сигналов помехи, -и избежать нарушения хода технологического процесса. Формула изобретения Устройство для программного управления, содержащее последовательно соединенные позиционный датчик, элемент ИЛИ, первый элемент И, блок сравнения и блок управления приводом, блок ввода програмг«1ы, подключенный к блокусравнения, триггер и счетчик, соединенные с первым элементом И, о т лич ающе ее я тем, что, с целью повышения надежности устройства, в него введены генератор импульсов и последовательно соединенные преобразователь кода, компаратор, дешифратор и второй элемент И, выход которого подключен через .триггер к преобразователю кода, первому элементу И и дешифратору, а другой вход через генератор импульсов и блок управления приводом - к первому и второму выходам блока сравнения, второй и третий выходы которого соединены с первым и вторым входами преобразователя кода, выход генератора импульсов через счетчик подключен к дpyгo ftr входу компаратора, а второй
выход дешифратора соединен со вторым входом элемента ИЛИ.
Источники информации, принятые во внимание при экспертизе
656024
1.Авторское свидетельство СССР W360666, кл. G Об F 15/50, 15.04.69.
2.Авторское свидетельство СССР №474480, кл. G.65 Q 60/00, 29.05.72.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления транспортным механизмом | 1983 |
|
SU1087959A1 |
| Устройство для ввода аналоговой информации | 1985 |
|
SU1260966A1 |
| Устройство для контроля электрических параметров цифровых узлов | 1984 |
|
SU1260974A1 |
| Способ локальной радиотелефонной связи и система для его осуществления | 1991 |
|
SU1831767A3 |
| УСТРОЙСТВО ПОИСКА ИНФОРМАЦИИ | 2006 |
|
RU2313128C1 |
| УСТРОЙСТВО ПОИСКА ИНФОРМАЦИИ | 2014 |
|
RU2553093C1 |
| Устройство поиска информации | 2017 |
|
RU2656736C1 |
| УСТРОЙСТВО ДЛЯ ТЕКУЩЕГО КОНТРОЛЯ И СТАТИСТИЧЕСКОГО АНАЛИЗА РАЗМАХОВ КОЛЕБАНИЙ НАПРЯЖЕНИЯ | 1993 |
|
RU2075752C1 |
| Устройство для отображения информации на экране цветного видеоконтрольного блока | 1988 |
|
SU1529280A1 |
| ТЕСТЕР УРОВНЯ ИННОВАЦИОННОГО ИНТЕЛЛЕКТА ЛИЧНОСТИ | 2013 |
|
RU2522992C1 |
