(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОТИВОВЕСОМ СТРЕЛОВЫХ ГРУЗОПОДЪЕМНЫХ МАШИН
немного гидравлическими магистралями 3 и 4 с гидросистемой, гидравлическнм распределителем 5 наклона ртрела, гидроцилиндром б наклона стрелы, смонтированным на эскцентриковой оси 7 с возможностью поворота, и с противоперегрузочной следящей системой, которая содержит два двухпозиционных золотника 8 и 9 и гидроцилиндр 10 с подпружиненным плунжером 11. На оси 7 смонтирован рычаг 12, взаимодействующий с двухпозиционным золотником 8 и пружиной 13 плунжера 11. Противовес 2 снабжен кулацком 14, сопряженным с золотником 9, а последний соединен гидравлическими магистралями 15,и-16,с гидросис темой и гидроцилиндром 10. Золотник 8 связан магистралями 17-19 с гидросистемой, гидроциляндром б наклона стрелы и гидроцилиндром 1 противовеса. В гидросистему включены насос 20 гидравлический распределитель 21 привода лебедки, двухпоэиционные золотники 22 и 23 для ручного управления противовесом 2, связанные гидравлическими магистралями 16, 19 и 24 с противоперегрузочной следящей системой, двухпозиционный золотник 25, взаимодействующий с рычагом-12, и связанный с управлением лебедкой магистралями 26 и 27. Гидроцилиндр 1 через обратные клапаны 28 и 29 соединен с золотниками 8 и 25.
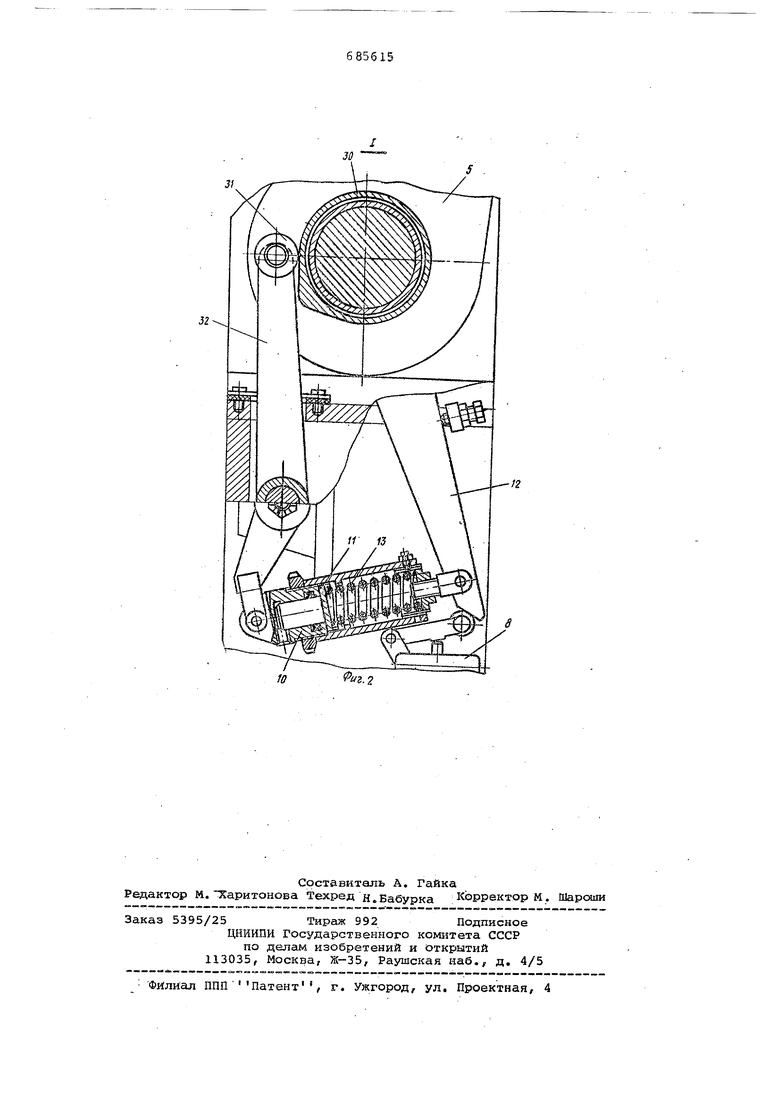
В .нижней части гидроцилиндра 6 наклона -стрелы закреплен кулачок 30 взаимодействующий через ролик 31 -с двуплечим рычагом 32, на противоположном плече которого шарнирно, закреплен гидроцилиндр 10.
Устройство работает следующим образом.
При повороте гидроцилиндра б, имеющего наклон стрелы 33, изменяется нагрузка на пружину 13 вследствие изменения экдцентриситета е, поскольку положение оси 7 не меняется, а угол направления усилия гйдроцйлиндра изменяется. Это происходит даже .при неизменном усилии на гидроцилиндре, б. Кроме того, усилие на гидроцилиндре по мере увеличения вылета также несколько меняется, так как на него влияют массы грузовой подвески, стрелы, гидроцилкндра, а также еще ряда причин. Кулачок 14 выполнен с таким профилем, что при его повороте вместе с гидрощ шндром б поворота рычага 32 пружин изменяет натяжениепружины 13, компенсируя указанные искажения. Благодаря этому момент срабатывания противоперегрузочной следящей системы совпадает с заданной грузовой характеристикой грузоподъемной машины, вследствие чего повышается производительность маши-. ны.
Формула изобретения
Устройство для автоматического управления противовесом стреловых грузоподъемных машин по авт. св. 658072, отличающееся , тем, что, с целью повышения производительности маашны, гидроцилиндр наклона стрелы в нижней части снабжен кулачком и двуплечим рычагом, взаимодействующим одним плечом с кулачком, .а другимсвязанным с подпружиненным плунжером дополнительного гидроцилиндра .
Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления противовесом стреловых грузоподъемных машин | 1976 |
|
SU658072A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1997 |
|
RU2131394C1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1999 |
|
RU2158220C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1995 |
|
RU2078021C1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 2002 |
|
RU2213042C1 |
| Устройство для управления лебедками стрелового крана | 1984 |
|
SU1293098A1 |
| Гидравлический привод стрелового самоходного крана | 1972 |
|
SU451608A1 |
| ГИДРОПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 2020 |
|
RU2733004C1 |
| СТАЦИОНАРНОЕ ШЛАНГУЮЩЕЕ УСТРОЙСТВО ДЛЯ НАЛИВА ЖИДКОСТЕЙ | 1965 |
|
SU176811A1 |