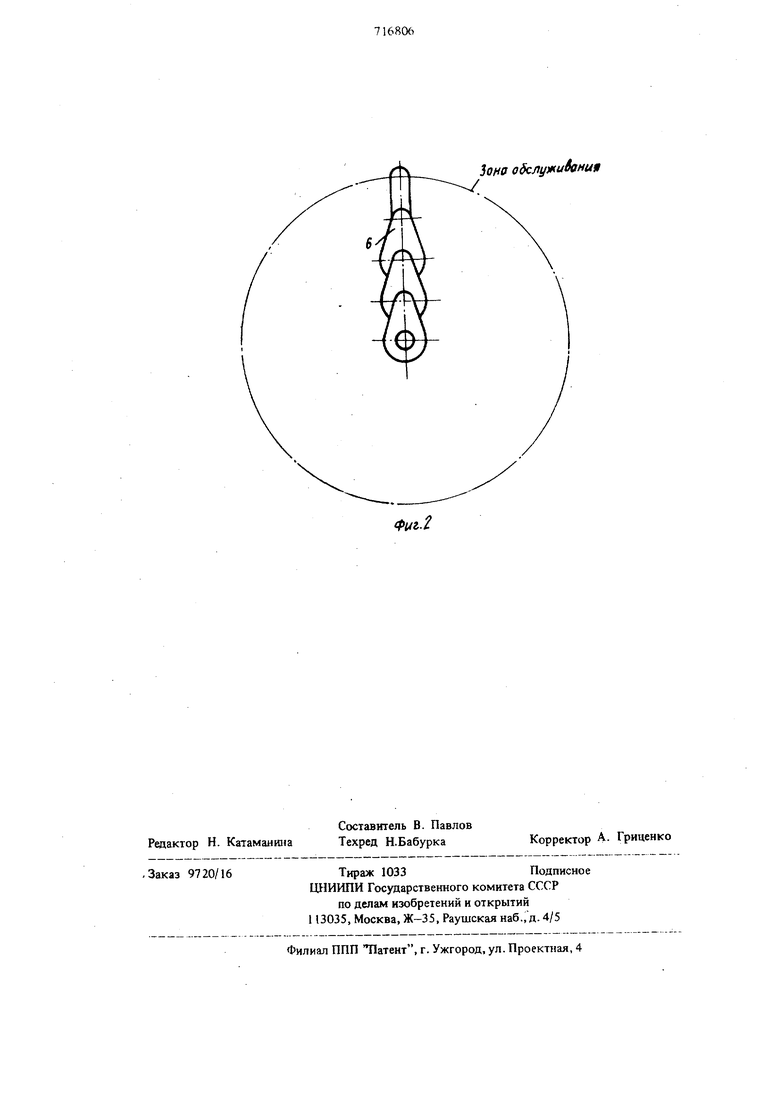
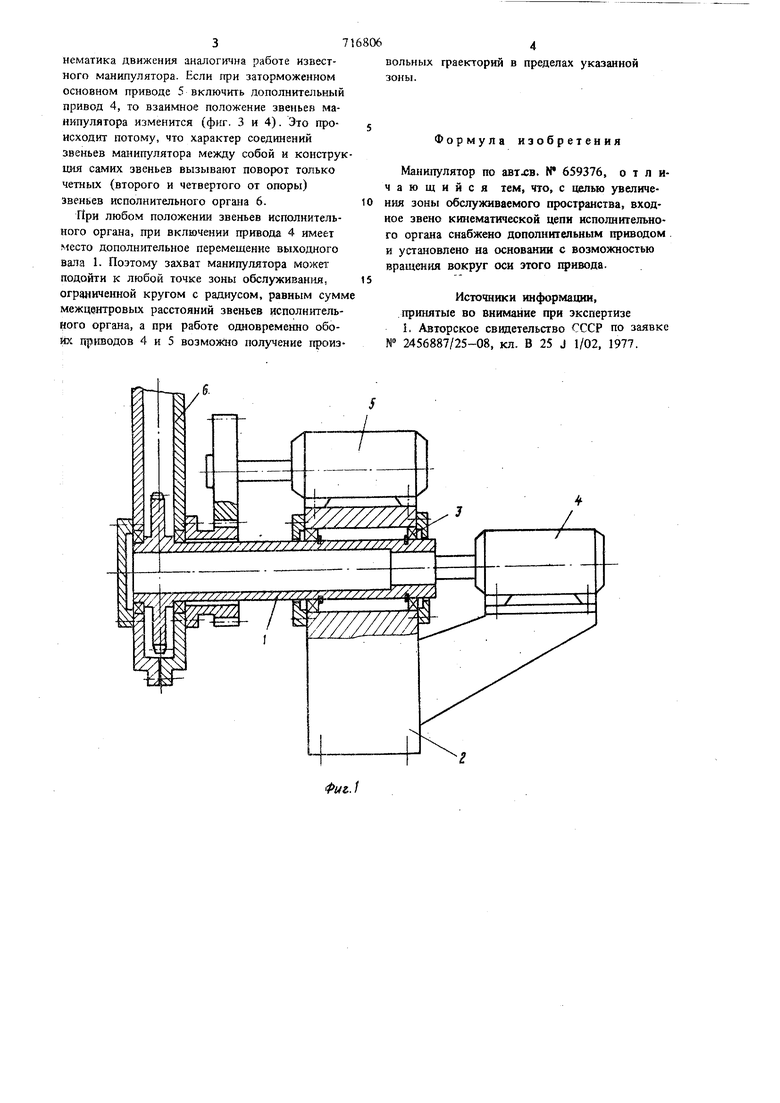
Изобретение относится к машиностроению, а именно к манипуляторам, предназначенным для механизации подъемно-транспортных и других технологических операций. Из основного авт.св. N 659376 известен манипулятор, содержащий многозвенный исполнительный орган, звенья которого шарнирно сочленены и кинематически связаны между собой и с основанием, при этом первое звено связано с приводом, а последнее - с захватом, каждое последующее звено смонтировано на предыдущем с возможностью относительного поворота в шарнире сочленения, входное звено цепи кинематической связи закреплено на основании, а выходиое - на захвате, при этом каждый участок цепи кинематической связи между смежными звеньями выполнен с передаточным отношением, равным 1:2, кроме послед него, передаточное отношение которого равно единице, а межцентровые расстояния всех участ ков равны между собой il Недостатком известного манипулятора является то, что он обеспечивает только прямолинейное движение захвата в обе стороны от опо ры и исключает перемещение в мертвых зонах, что уменьшает зону обслуживаемого им пространства. Цель изобретения - увеличение зоны обслуживаемого простракства. Это достигается тем, что входное звено кинематической .цепи исполнительного органа снабжено дополнтгльным приводом и установлено на основан1Ш с возктожностью вращения вокруг этого привода. На фиг. 1 изображен манипулятор, разрез (исполнительный орган условно не показан); на фиг. 2 - зона обслуживаемого пространства. Манипулятор содержит входное звено кинематической цепи, выполненное в виде вала - звездочки 1, установленной на опоре 2 при помощи подшипникового узла 3 и снабженное дополнительным приводом 4, закрепленным на опоре 2. Основной пр1геод 5 кинематически связан со звеньями исполнтельного органа 6. Манипулятор работает следующим образом. В случае, когда испо)гаительный орган 6 находится в сложенном положении и включен только привод 5, а привод 4 заторможен, ки3нематика движения аналогична работе известного манипулятора. Если при заторможенном основном приводе 5 включить дополнительный привод 4, то взаимное положение звеньев манипулятора изменится (фиг. 3 и 4). Это происходит потому, что характер соединений звеньев манипулятора между собой и конструк ция самих звеньев вызывают поворот только четных (второго и четвертого от опоры) звеньев исполнительного opraira 6. При любом положении звеньев исполнительного органа, при включении привода 4 имеет место дополнительное перемещение выходного вала 1. Поэтому захват манипулятора може1: подойти к любой точке зоны обслуживанм, оградиченной кругом с радиусом, равным сумм межоднтровых расстояний звеньев исполнтельного органа, а при работе одновременно обоих пр йодов 4 и 5 возможно получение произвольньик фаекторий в пределах указанной зоны. Формула изобретения Манипулятор по автлв. N 659376. отличающийся тем, что, с целью увеличения зоны обслуживаемого пространства, входное звено кинематической цепи исполнительного органа снабжено дополнительным приводом и установлено на основании с возможностью вращения вокруг оси этого щ)ивода. Источники информации, принятые во внимание при экспертизе 1, Авторское сввдетельство СССР по заявке N 2456887/25-08, кл. В 25 J 1/02, 1977.
Зона о5служи1бани9
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1979 |
|
SU770780A1 |
| Исполнительный орган манипулятора | 1982 |
|
SU1050861A1 |
| Манипулятор | 1978 |
|
SU763080A2 |
| Манипулятор | 1977 |
|
SU659376A1 |
| Манипулятор | 1980 |
|
SU872248A2 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА | 1989 |
|
SU1832620A1 |
| Исполнительное устройство манипулятора | 1986 |
|
SU1414620A1 |
| Манипулятор | 1983 |
|
SU1115898A1 |
| Манипулятор | 1981 |
|
SU996182A2 |
| Манипулятор | 1985 |
|
SU1284824A1 |