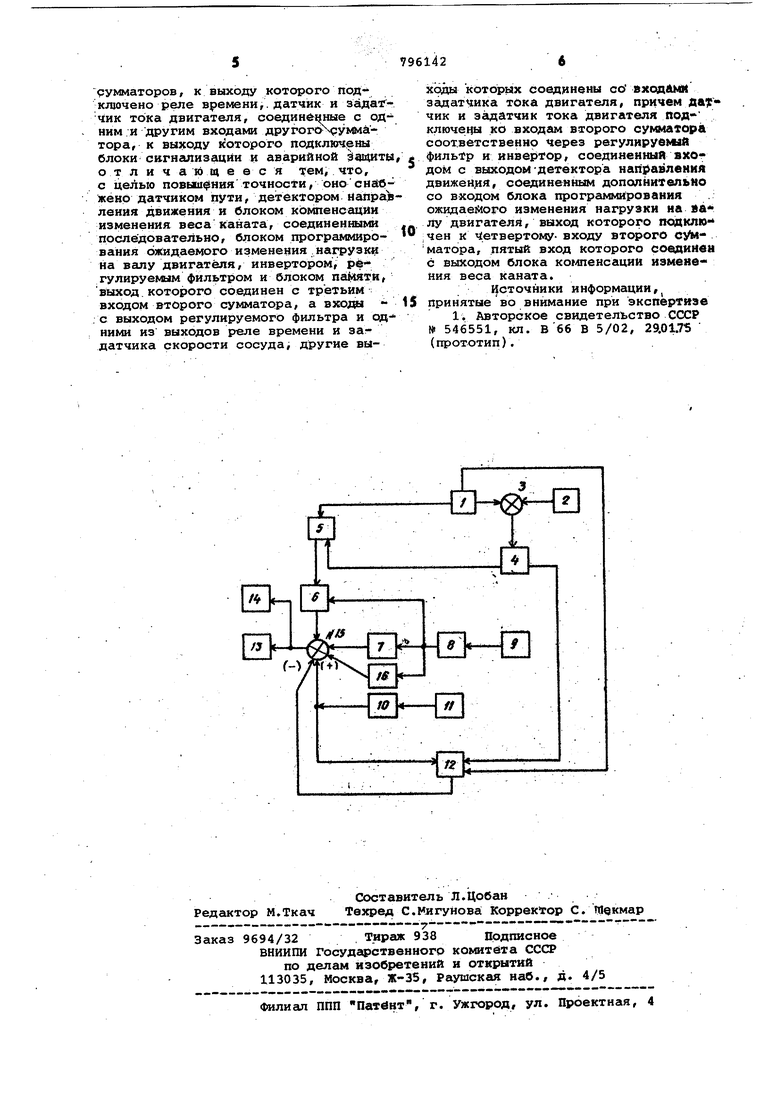
(54) УСТРОЙСТВО ДЛЯ КОНТ ПОДЪЕМН Изобретение относится к управлени электроприводом с гибким канатом, например электроприводом шахтных под емных установок, и может найти свое применение в схемах электропривода других производственных механизмов . Известно устройство для контроля режимов работы подйемной установки, содержащее датчик и задатчик скорости сосуда, соединенные со входами одногоиз сумматоров, к выходу ко торого подключено реле времени, датчик и задатчик тока двигателя, соеди ненные с одним и другим входами другого сумматора, к выходу которого подключены блоки сигнализации и аварийной защиты ij . Однако это устройство обладает недостаточно высокой точностью контроля режимов при изменениях условий функционирования подъемной установки, Цель изобретения - повышение.точности. Эта цель достигается тем, что устройство снабжено датчиком пуои, детектором направления движения и блоком компенсации изменения веса каната, соединенными последовательно, блоком программирования ожидаемо РЕЖИМОВ РАБОТЫ В П т Б ТАНОВКИ ФОНД го изменения нагрузки на валу двигателя, инвертором, регулируемым фильтром и блоком памяти, выход которого соединен с третьим входом второгЬ сумматора, а входы - с выходом регулируемого фильтра и одними из выходов реле времени и задатчика скорости сосуда, другие вйходы которых соединены со входами задатчика тока двигателя, причем датчик и задатчик тока двигателя подключены ко входам второго сумматора соответственно через регулируемый фильтр и инвертор, соединенный входом с выходом детектора направления движения, соединенным дополнительно со входом блока программирования ожидаемого изменения нагрузки на валу двигателя, выход которого подключен к четвертому входу второго сумматора, пятый вход которого соединен с выходом блока компенсации изменения веса каната. На чертеже изображена функциональная схема устройства. Устройство содержит задатчик 1 и датчик 2 скорости (ускорения) сосуду, сумматор 3, реле 4 времени, задатчик 5 полного тока двигателя, инвертор 6, функционирующий как инверторный усилитель, блок 7 компенсации изменения веса каната, детектор направле.ния движения, датчик 9 пути, регулируемый фильтр 10, датчик 11 тока двигателя, блок 12 памяти, блок 13 сигнализации и блок 14. аварийной защиты, параллельно подключенные к выходу сумматора 15,и блок 16 программирования ожидаемого изменения нагрузки на валу двигателя, подключенный параллельно с упомянутым блоком 7,
Первый входсумматора 3 соединен с задатчиком 1 скорости, соединенным также и с первым входом, задатчика 5 тока, выход которого через, инвертор 6 подключен к первому входу сумнабора 15. Выход сумматора 3 через реле 4 времени одновременно подключен ко второму входу задатчика 5, к первому входу блока 12 памяти, выход которого подключенко второму входу сумматора 15. Выход датчика 11 тока через фильтр 10 одновременно подключен ко второму входу блока 12 и третьему входу сумматора 15. Выход датчика 9 пути через детектор д направления движения (детектор не иска жает. величину выходного сигнала датчика 9) одновременно подключен ко входу инвертора 6 и через блок 7 - к четвертому входу сумматора 15. Всломогательная аппаратура,как например, датчик начала замедления, ключи пуска и выдачи других циклических команд на чертеже не приведены, так как они не изменяют сущность технического решения, а являются обяз.атель ньами элементами схемы управления, электропривода.
После выбора режима цикла дв,ижения задатчик 1 на входы задатчика 5 и сумматора 3 начинает выдавать уставки скорости (ускорения) (эквивалентами могут быть токи и напряжения). Задатчик 5 согласно выходному сигналу за-. датчика 1 через инвертор 6 i уставку на вход, сумматора 15. Конечная величина уставки определяется режимом инвертора 6, который определяется направлением движения или выходным сигналом детекторэ 8. Дд равевства выходного сигнала дат1хика 2 с выходным сигналом задатчика 1 реле 4 включено, а выход блока 12 отключен. Поэтому выходной сигнал датчика 11, отфильтрованный в фильтре 10 от высокочастотных соста яющих/ поступает на третий вход сумматора 15. Одновременно с выходов блоков 7 и 16 в суквлатор 15 поступают сигналы в функции пути и направления движения сосудов. Если движение сосудов или разгон .двигателя происходит при нормальных условиях, т.е. в отсутствии непредусмотренных изменений тока двигателе, то н.а выход сумматора 15 разностный сигнал должен быть близок к нулю и поэтому двигатель начинает набирать необходимую скорость задаваемую задатчиком 1. Когда сигнал на входе сумматора 3 снизится до величины зоны нечувствитель.ности реле
времени, последнее с заданной ыдержкой времени выдает сигналы на отключение выходного сигнала задатчика5 и подключение -выхода блока 12 ho 3x0 ду сумматора Г5. Таким образом, блок 12 в промежутке отработки динамической ошибки по скорости движения сосудов (иди вала двигателя) запоминает тока двигателя при нор-. Мёшьных У.СЛОВИЯХ пус.ка, И далее испойьэует эту величину в. качестве уставки тока до завершения процесса , разгона. После снятия сигнала ускорения реле 4 под воздейстнием динамической ошибки по скорости опять включается и на время переходного процесса (конкретизируется экспериментально на конкретном приводе) выход блока 12 замыкает на выход фильтра 10. Таким образом, сохраняется равенство нулю сигнала на выходе сумматора 15.и осуществляется запись нового значения тока двигателя. Посл.е истечения временив выдержки реле 4 приходит в исходное состояние, при котором первый вход блока 12 отключается, а выход его подключается ко входу сумматора 15. При равномерном движении динамич-еская ошибка, близка к:нулю и реле 4 отключено. Взависимости от местонахождения и напраления движения сосудов блоки 7 и 16 выдают сигналы, компенсирующие ожидамые изменения сил сопротивления , движению сосудов и веса кайатов в-функции местонахождения сосудов., Таким образом, текущие значения тока якоря не будут равны заданному, если появятся какие-либо.дефекты в элементах предлагаемого устройства, при которых изменяется величина тока. При превышении разностиого сигнала на выходе сумматора 15 наперед заданных величин зоны нечувствительности блоков 14 и 13 последние приводят в действие соответствующую сигнальную и аварийную аппаратуру.
Использование предлагаемого устройства позволяет свести к минимуму (и пределах зоны высокочастотных колебаний тока двигателя, определяемое частотой упругих колебаний канала и т.д. ) зону, нечувстйительностн заодаты, независимость той зоны ; к весу и направлению движения сосудов, -что обеспечивает повышение безаварийности работы подъемной установки.
Формула изобретения
Устройство для контроля режимов работы подъемной установки, содержащее датчик и задатчик скорости сосуда соединенные со входами одного из сумматоров, к выходу которого подключено реле времени,, датчик и задаГчик тока двигателя, соединенные о одним и другим входами другог Э румматора, к выходу которого подключены блоки скгнгшизацйи и аварийной эдиты отличающееся тем, что, с целью повышения точности, оно снабжено датчиком пути, детектором Hcinpab леиия Движения и блоком компенсации изменения веса каната, соединенными последовательно, блоком программирования ожидаемого изменения нагрузки на валу двигателя, инвертором, регулируемым фильтром и блоком памятиf выход.которого соединен с третьим входом второго сумматора, а вэюды .с выходом регулируемого фильтра и одними из выходов реле времени и задатчика скорости сосуда, другие выходы KOTopbix соединены со входдьм задатчика тока двигателя, причем Дат« чик и задатчик тока двигателя подключень) ко входам второго cyMMatopa соответственно через регулируемой фильтр и инвертор, соединенный входо1Л с выходом-детектора направления движения, соединенным дополнительно со входом блока программирования . ожидаемого изменения нагрузки на ЛА лу двигателя, выход которого подклю чен к Четвертому- входу второго сУмматора, пятый вход которого соединен с выходом блока ког шенсации изменения веса каната. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 546551, кл. В 66 В 5/02, 29.01.75 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для токовой защиты электропривода шахтной подъемной установки | 1977 |
|
SU674141A1 |
| Устройство токовой защиты электропривода | 1981 |
|
SU964835A1 |
| Устройство для автоматического управления асинхронным электродвигателем в режиме рекуперативного торможения | 1990 |
|
SU1782332A3 |
| Способ управления горной машиной | 1990 |
|
SU1781426A1 |
| Способ управляющей электродвигателем буровой лебедки и устройство для его осуществления | 1989 |
|
SU1705994A1 |
| Система обнаружения застревания сосуда в стволе шахты | 1977 |
|
SU765176A1 |
| Электропривод лебедки экскаватора-драглайна | 1991 |
|
SU1775832A1 |
| Электропривод подъемной машины | 1987 |
|
SU1511837A1 |
| Электропривод возвратно-поступательного движения | 1983 |
|
SU1136295A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
