1
Мзобретение относится к технике получения и подготовки проб примесей, встречающихся в водоемах, и может быть использовано при океанографических исследованиях, в частности для контроля за загрязнением глубинных вод.
Известны Т атометры в виде емкостей, опускаемых с судна па тросе с целью отбора пробы воды с заданной глубины и последуюш,сго исследования отобраппой пробы. Существуют также батометры вакуумные, в которых вода засасывается с нужной глубины по шлангу в резервуар, в котором насосом создают вакуум .
Наиболее близким но технической сущности к изобретению является устройство для отбора проб примесей в воде, содержащее иогружаемый аннарат, включающий трубопровод, уловители примесей, двигатель с насосом, датчик глубины, электромагнитные клапаны, кабель-трос 2.
Однако это устройство имеет следующие недостатки; для онускання данного агрегата необходим не нростой трос, а специальный кабель-трос, что ограничивает диапазон рабочих глубин, носкольку кабель-трос трудно сделать работоснособным для больщих океанских глубин. При этом необходима еще и специальная лебедка для работы с кабель-тросом, поскольку обычные
2
гидрометрические лебедки, имеющиеся на океанографических суднах, не пригодны для этой цели. Так как глубина погруження определяется по длине вытравленного кабельтроса, то возможны значительные ногрешности в определении расстояния от дна до спускаемого агрегата, что делает невозможным работы вблизи дна.
Целью изобретення является новышепие точности отбора путем расшнрения диапазона рабочих глубин и определения расстояния от дна до спускаемого агрегата. Это достигается тем, что предлагаемое
устройство снабжено гпдроакустическим из,:1учателем, двумя мультпвпбраторами, расходомером, автономным источником электроэнергии, командным блоком, содержащим шаговый распределитель, схему
сравнеиия, пускатель, причем автономный источнпк электроэнергии связан с датчиком глубины н гидроакустическим излучателем, раснределнтель соединен с одним из входов схемы сравнения и электромагнитными клапанами, второй вход которой соединен с выходом датчика глубины, а выход схемы сравнення соединен с нускателем, К выходам которого подключены распределитель, двигатель насоса, один из
мультивибраторов и расходомер, выходы
3
которого связаны с вторым мультивибратором, и пускателем командного блока.
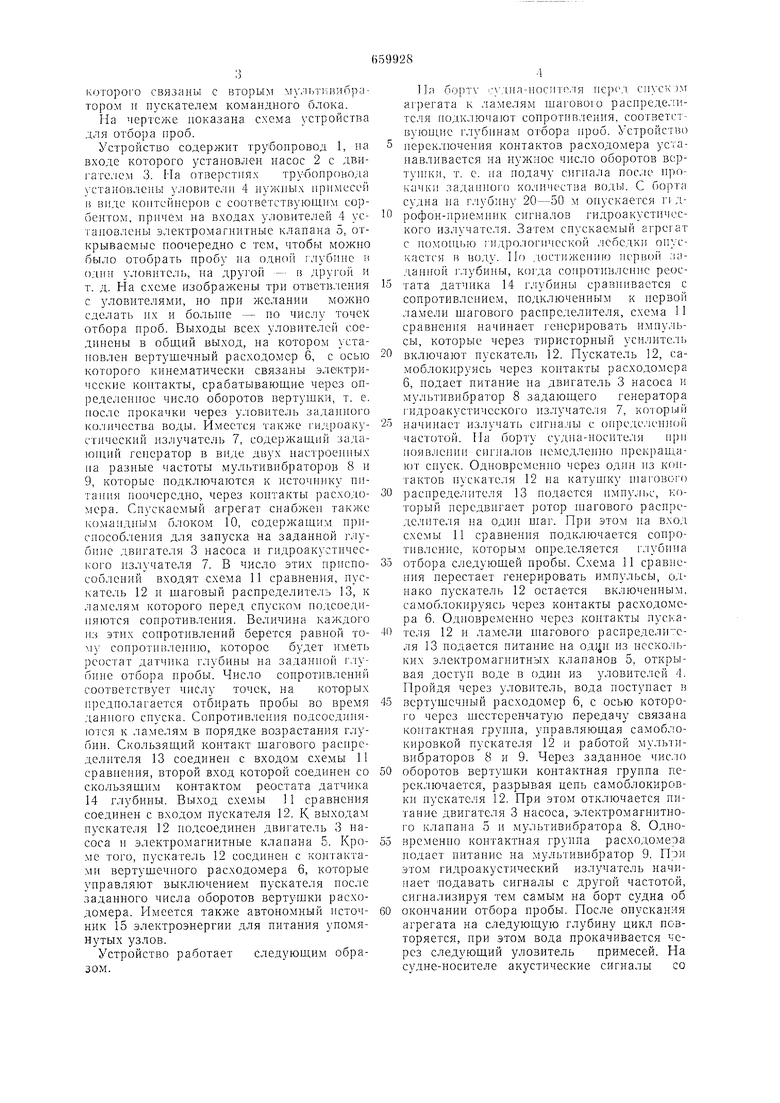
На чертеже показана схема устройства для отбора нроб.
Устройство содержит трубопровод 1, на входе которого установлен насос 2 с двигателем 3. На отверстиях трубопровода установлены уловители 4 нужных примесей в виде контейнеров с соответствующим сорбентом, причем на входах уловителей 4 установлены электромагнитные клапана 5, открываемые ноочередно с тем, чтобы можно было отобрать пробу на одной глубине в однн уловитель, на другой - в другой и т. д. На схеме изображены три ответвления с уловителями, но при желании можно сделать их и больше - по числу точек отбора проб. Выходы всех уловителей соединены в общий выход, на котором установлен вертушечный расходомер 6, с осью которого кинематически связаны электрические контакты, срабатывающие через определенное число оборотов вертущки, т. е. после прокачки через уловитель заданного количества воды. Имеется также гидроакустический излучатель 7, содержащий задающий генератор в виде двух настроенных на разные частоты мультивибраторов 8 и 9, которые подключаются к источнику питания ноочередно, через контакты расходомера. Спускаемый агрегат снабжен также командным блоком 10, содержащим приспособления для запуска на заданной глубине двигателя 3 насоса и гидроакустического излучателя 7. В число этих приспособлений входят схема 11 еравнения, пускатель 12 и шаговый распределитель 13, к ламелям которого перед спуском подсоединяются сопротивления. Величина каждого из этих сопротивлений берется равной тому сопротивлению, которое будет иметь реостат датчика глубины на заданной глубине отбора нробы. Число сопротивлений соответствует числу точек, на которых предполагается отбирать пробы во время данного спуска. Сопротивления подсоединяются к ламелям в порядке возрастания глубин. Скользящий контакт шагового распределителя 13 соединен с входом схемы 11 сравнення, второй вход которой соединен со скользящим контактом реостата датчика 14 глубины. Выход схемы 11 сравнения соединен с входом пускателя 12. К выходам пускателя 12 подсоединен двигатель 3 насоса и электромагнитные клапана 5. Кроме того, пускатель 12 соединен с контактами вертушечиого расходомера 6, которые управляют выключением пускателя после заданного числа оборотов вертушки расходомера. Имеется также автономный источник 15 электроэнергии для питания упомянутых узлов.
Устройство работает следующим образом.
4
На борту судна-носителя перед спуском агрегата к ламелям шагового распределителя подключают сопротивления, соответствующие глубинам отбора проб. Устройство 5 переключения контактов расходомера устанавливается на нужное чнсло оборотов вертушки, т. е. на подачу сигнала после прокачки задаиного количества воды. С борта судна на глубину 20-50 м опускается гид0 рофон-приемник сигналов гидроакустического излучателя. Затем спускаемый агрегат с помощью гидрологичеекой лебедки опускается в воду. Но достижению иервой заданной глубины, когда сопротивление реостата датчика 14 глубины сравнивается с сопротивлением, подключенным к первой ламели шагового распределителя, схема 1I сравнения начинает генерировать импульсы, которые через тиристорный усилитель включают пускатель 12. Нускатель 12, самоблокируясь через контакты расходомера 6, подает питание на двигатель 3 насоса и мультивибратор 8 задающего генератора гидроакустического излучателя 7, который
5 начинает излучать сигналы с определенной частотой. На борту судна-носителя при появлении сигналов немедленно нрекращают спуск. Одновременно через один из контактов пускателя 12 на катушку шагового распределителя 13 подается импульс, который передвигает ротор шагового распределителя на один шаг. Нри этом на вход схемы 11 сравнения подключается сопротивление, которым определяется глубина отбора следующей пробы. Схема И сравнения перестает генерировать импульсы, однако пускатель 12 остается включенным, самоблокируясь через контакты расходомера 6. Одновременно через контакты нуска0 теля 12 и ламели шагового распределителя 13 подается питание на од14н из нескольких электромагнитных клапанов 5, открывая доступ воде в один из уловителей 4. Нройдя через уловитель, вода поступает в
5 вертушечный расходомер 6, с осью которого через шестеренчатую передачу связана контактная группа, управляющая самоблокировкой пускателя 12 и работой мультивибраторов 8 и 9. Через заданное число
0 оборотов вертушки контактная группа переключается, разрывая цепь самоблокировки пускателя 12. При этом отключается питание двигателя 3 насоса, электромагнитного клапана 5 и мультивибратора 8. Одновременно контактная группа расходомера подает питание на мультивибратор 9. При этом гидроакустический излучатель начинает подавать сигналы с другой частотой, сигнализируя тем самым на борт судна об окончании отбора пробы. После опускания агрегата на следующую глубину цикл повторяется, при этом вода прокачивается через следующий уловитель примесей. На судне-носителе акустические сигналы со
спускаемого агрегата принимаются гидрофоном и поступают в акустическую систему, которая преобразует ультразвуковые сигналы в слышимые звуки. Одновременно сигнал поступает в измерительную систему, которая измеряет время между приходами прямого и отраженного сигналов, по которому определяют расстояние от спускаемого агрегата до дна, причем более точно, чем это делалось в прототипе с помощью кабель-троса, который может быть изогнут, н за счет этого глубина будет определена неточно.
Таким образом, за счет снабжения спускаемого агрегата автономным источником питания удалось обойтись обычным тросом вместо специального кабель-троса, что увеличило диапазон рабочих глубин и позволило использовать имеющиеся на судах гидрометрические лебедки, в противном случае прищлось бы налаживать производство специального кабель-троса и лебедок для него. За счет введения расходомера, датчика глубины и командного блока, а также за счет уномянутого выше особого выполнения излучателя удалось автоматизировать работу насоса и получать более точную информацию о глубинах погружения аппарата и работе его узлов, необходимую для управления устройством без кабеля-троса. В результате предложенное устройство позволяет работать на больщих глубинах и притом на -меньщих расстояниях от дна, чем при работе с известным устройством.
Формула изобретения
Устройство для отбора нроб примесей в воде, содержащее погружаемый аппарат,
включающий трубопровод, уловители нри.месей, двигатель с насосом, датчик глубины, электромагнитные клапаны, отличающееся тем, что, с целью повышения точности отбора нутем расошрения диапазона рабочих глубин и определения расстояния от дна до спускаемого агрегата, оно снабжено гндроакустнческим излучателем, двумя мультивибраторами, расходомером, автономным источником электроэнергии, командным блоком, содержащим шаговый раснределитель, схему сравнения, пускатель, причем автономный источник электроэнергии связан с датчиком глубины и гидроакустическим излучателем, раснределитель соединен с одним из входов схемы сравнения и электромагнитными клапанами, второй вход которой соединен с выходом датчика глубины, а выход схемы сравнения соединен с нускателсм, к выходам
которого подключены распределитель, дви1-атель насоса, один из мультивибраторов и расходомер, выходы которого связаны с вторым мультивибратором и пускателем командного блока.
Источники информации,
принятые во внимание прн экспертизе 1. Справочник по гидрометеорологическим приборам и установкам. Гидрометеоиздат, 1971, с. 141.
2. Патент США Л 3409771, кл. 250-83, 1968.

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ПОЛУЧЕНИЯ ДАННЫХ ПРИДОННОЙ РАДИОАКТИВНОСТИ В ГЛУБОКОВОДНЫХ АКВАТОРИЯХ | 2020 |
|
RU2739136C1 |
| ГЛУБОКОВОДНЫЙ ЗОНД ДЛЯ ОТБОРА ПРОБ ЖИДКОСТЕЙ В БАТОМЕТРЫ | 2022 |
|
RU2807544C1 |
| ПРОФИЛОГРАФ ДЛЯ ВЕРТИКАЛЬНОГО ЗОНДИРОВАНИЯ МОРСКОЙ СРЕДЫ | 2012 |
|
RU2499280C2 |
| КОМПЛЕКС ДЛЯ ДОБЫЧИ РАССРЕДОТОЧЕННЫХ ПО МОРСКОМУ ДНУ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 2022 |
|
RU2788227C1 |
| БУКСИРУЕМАЯ ГИДРОАКУСТИЧЕСКАЯ АППАРАТУРА СУДНА | 2000 |
|
RU2171197C1 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| Способ определения поправок к глубинам, измеренным однолучевым эхолотом при съёмке рельефа дна акватории, и устройство для его осуществления | 2017 |
|
RU2649027C1 |
| Устройство для автоматического отбора проб воды | 1977 |
|
SU726469A1 |
| УСТРОЙСТВО для ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ГРУППОЙ ДВУХПОЗИЦИОННЫХ ОБЪЕКТОВ | 1973 |
|
SU368704A1 |
| ГИДРОАКУСТИЧЕСКИЙ ЗОНД ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ЗВУКА В МОРЕ | 2015 |
|
RU2599916C1 |

