- 1
Изобретение относится к вычислительной технике и автоматике и может быть использовано для преобразования различных величин, приведенных к угловым перемещениям вала в код.
Известны преобразователи перемещения в код, содержащие датчик перемещения с системой пространственно-смещенных считьшающих элементов, блок формирования знака перемещения, соединенные со входами знака блока индикации и реверсивного регистра-накопителя 1. Известный преобразователь обладает невысокой помехоустойчивостью вследствие ложных считываний, обусловленных наводками и помехами.
Наиболее близким рещением является преобразователь, содержащий датчик перемещения с системой пространственнбсмещенных считывающих элементов, выходы которых через регистр текущего состояния подключены к последовательно соединенным между собой регистру предществующего состояния и блоку формирования импульсов смены состояний кода, выходы которого через блок формирования знака перемещения подключены ко входам знака
блока индикации и блока формирования счетных импульсов, счетные входы которого через реверсивный делитель частоты подключены к выходам блока смены состояний кода, а выходы через реверсивный регистрнакопитель - к входам блока индикации, которые через дешифратор нулевого состояния соединены со входом сброса блока формирования знака перемещения , генератор тактовых импульсов, блок произвольной установки нуля 2.
Недостатком известного преобразователя является его невысокая надежность, вызванная возможностью появления ложных им пульсов в результате сбоя в течение одного оборота вала датчика перемещения.
Целью изобретения является повыщение надей ности преобразователя.
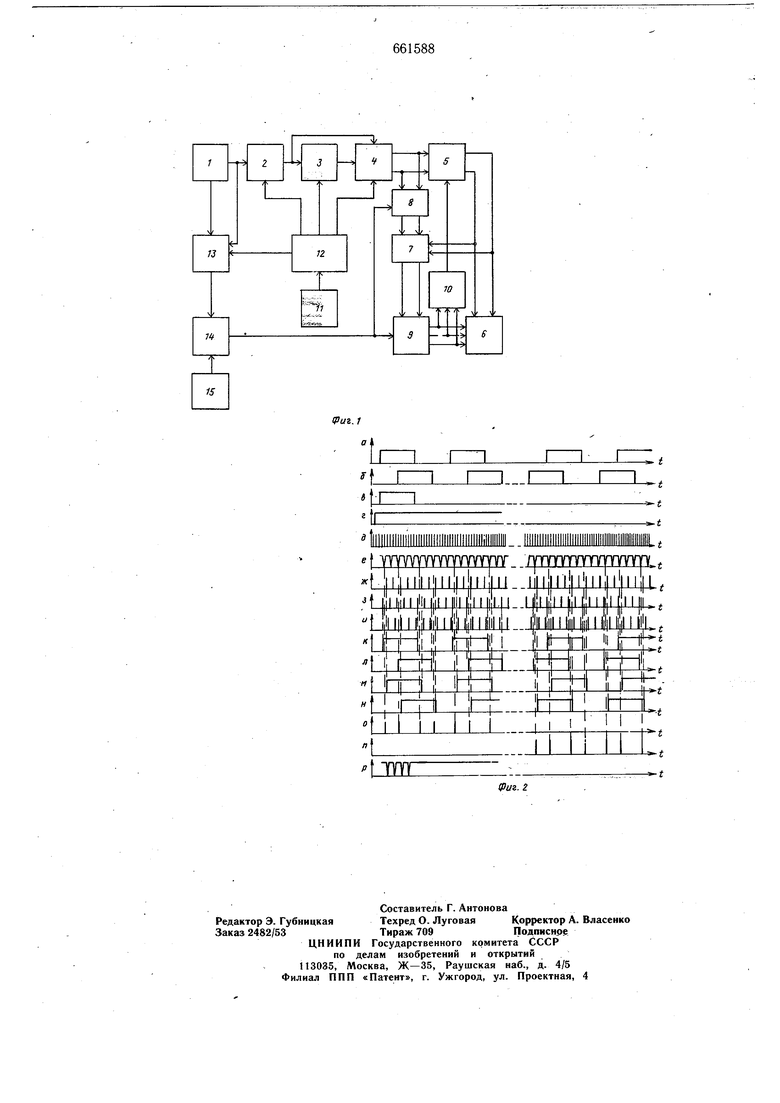
Это достигается тем, что в него введены распределитель тактовых импульсов, элемент ИЛИ и блок автоматической установки нуля, входы которого подключены к выходу нуля датчика перемещения, а выход - к одному входу элемента ИЛИ, другой вход которого подключен к выходу блока произвольной установки нуля, выход генератора тактовых импульсов соединен со входом распределителя тактовых импульсов, выходы котор ого подключены соответственно кстробирующим входам блоков автоматической установки нуля, формирования импульсов смены состояний кода и регистров текущего и предшествующего состояний, выход эле мента ИЛИ подключен ко входам сброса реверсивного регистра-накопителя и делителя частоты. На фиг. 1 приведена функциональная схема предлагаемого преобразователя. На фиг. 2 - диаграмма,которой поясняется работа преобразователя. Датчик 1 (см. фиг. 1) перемещения содержит систему считывающих элементов, пристранственно смещенных на величинуа (- + K), где - шаг квантующего эле. / I Т Ч Г rij VrFTYrtT TYTit ТГ Лг-ч-1 rt мента; n - число смешенных считываю щих элементов, К 0, 1,2....-ряд чисел, считывающих элементов (на чертеже не показаны) , выходы которых через регистр 2 текущего состояния подключены к последовательно соединенным между собой регистру 3 предшествующего состояния и блоку 4 формирования импульсов смены состояний кода, выходы которого через блок 5 формирования знака перемещения подключены ко входам знака блока 6 индикации и блока 7 формирования счетных импульсов, счетные входы которого через реверсивный делитель 8 частоты подключены, к выходам блока 4 смены состояний коДг1; а 6ь1ХодыЧ(ерёз рётвёрсивный регистр-накопитель 9 - к входам блока 6 индикации, которые через дешифратор 10 нулевого СОСТОЯНИЯ соединены со входом сброса Олока 5 формирования знака перемещения. Выход генердтора 11 тактовых импульсов соединен со входом распределителя 12 тактовых импульсов, вы ХЪда кбт6рогб подключены соответственно к стробирующим входам блоков автоматической установки нуля 13, фУрмирования импульсов смены состояний кода 4, и регистров текущего 2 и предшествующего 3 состояний. Входы блока 13 автоматической 5 станбВ и ну-ля подклютены к выходам нуля датчика 1 пёрёмеЩШйя, а выход - к одному входу элемента ИЛИ 14, ТГ р5То1 У вШду которого подключен выход блока 15 произвольной установки нуля, а выход элемен,та ИЛИ 14 подключен ко входам сброса реверсивных регистра-накопителя 9 и делителя частоты На диаграмме работы преобразователя при П 2 обозначены:- « а)импульсы первой последовательности; б)импульсы второй последовательности; в)йм 11у71бШ тбчного нуля; г)импульсы «грубого нуля; д)сигналы на выходе генератора 11 тактовых импульсов; е)тактовые импульсы ТИ 2 с вь1хода распределителя 12; ж)тактовые импульсы ТИ 3 с выхода распределителя 12; з)тактовые импульсы ТИ 1 с выхода распределителя 12; и) тактовые импульсы ТИ 4 с выхода распределителя 12; к) единичный выход одного канала регистра 2; X л) единичный выход другого канала регистра 2; -- . м) единичный выход одного канала регистра 3; , . н) единичный выход другого канала регистра 3; о) импульсы смены состояний « + 4 (когда первая пос:ледовательность oneгм-1i.rr fi , режает вторую); п) импульсы смены состояний «- блока 4 .(когда вторая последовательность опережает первую, т. е. при противоположном направлении перемещения); р) импульсы установки нуля с выхода блока 13 автоматической установки нуля. Работа преобразователя происходит следующим образом. При перемещении с выхода датчика 1 перемещения снимается п последовательностей прямоугольнъ)х импульсов, сдвинутых между собой на градусов, импульсы «точного нуля 1 раз за оборот квантующего элемента датчика и импульс «грубого нуля 1 раз за оборот вала. Импульс «точного нуля совпадает по времени с одним импуЛьСОМ одной из последовательностей. Совпадение импульсов «точного и «грубого ну-, ля, поступающих на входы блока 13 автоматической установки нуля 6, происходит только один раз за оборот вала датчика 1 перемещения. Число импульсов в каждой последовательности в любой момент времени соответствует угловому положению вала датчика относительно нулевого, опредеЛЯЮп1ёгосй совпадением нулевых импульсов. Текущее состояние чувствительных элементов записывается в регистр 2. Содержимое регистра 2 через определенный промежуток времени переписывается в регистр 3, где хранится некоторое время после смены информации в регистре 2 и, таким образом. будет являться предыдущим состоянием чувствительных элементов. В блоке 4 формирования импульсов смены состояний кода Происходит сравнение текущего и предыдущего состояний и при каждой смене состояний чувствительных элементов вырабатываются импульсы « + 1 при вращении входного вала в одном направлении или «-1 при вращении в противоположном направлении. В течение периода следования импульсов одной последовательности вырабатываются 2п импульсов «+ 1 или «-.. Импульсы « + Ь и «-1 по двум щинам поступают на бходы реверсивного блока 8 деления частоты и блока 5 формирования знака перемещения. Реверсивный блок 8 деления частоты предназначен для деления частоты следования импульсов « + 1 или «-1. В зависимости от модифи саций коэффициент пересчета может изменяться. При коэффициенте пересчета равном 1, импульсы « + 1 или«-1 минуют блок 8. Сигналы с выходов триггеров блока 8 деления частоты поступают на входы блока 7 формирования счетных им.пульсов. На знаковые входы блока формирования 7 поступают также плюсовой и минусовой выходы блока 5 формирования знака перемещения. Блок 7 формирования счетных импульсов вырабатывает импульсы сложения « + Г счета или вычитания «-1 счета с учетом знака и направления вращения. Импульсы сложения или вычитания ,мргут формироваться на каждый, каждый второй, каждый п-й, каждый 2 п-й импульсы « + 1 или «-1 в зависимости от модификации преобразователя. В первом случае реверсивный блок 8 деления частоты отсутствует. Импульсы «-f 1 счета вырабатываются при наличии знака плюс и импульсов « + Ь или при алтнт знака минус и импульсов «-1. Импульсы «-1 счета вырабатываются при. наличии знака минус и импульсов . Импульсы сложения и вычитания по двум щинам поступают на накопитель регистра 9. Дещифратор 10 нулевого состояния вырабатывает импульс при нулевом состоянии всех триггеров регистра-накопителя 9. И.мпульс нулевого состояния регистра-накопителя 9 поступает на вход блока 5-формирования знака перемещения. Блок 5 формирования знака перемещения вырабатывает знак плюс, еели после нулевого состояния регистра-накопителя 9 первым приходит импульс « + 1 и знак минус, если после нулевого состояния регистра-накопителя 9 первым приходит импульс «-1. Распределитель 12 тактовых импульсов управляется генератором 11 тактовых импульсов, имеющим частоту (около 1 МГц) значительно выще частоты смены еостояний чувствительных элементов. Распределитель 12 вырабатывает четыре тактовых импульса: ТИ 1, ТИ 2, ТИ 3 и ТИ 4 (см. фиг. 2). По первому тактовому импульсу ТИ 1 происходит запись текущего состояния чувствительных элементов в регистр 2. Затем по второму тактовому импульсу ТИ 2 происходит сравнение текущего и предыдущего состояний и формирование импульсов «+1 или «-1. После этого соде{)жимое регистра 2 по третьему тактовому импульсу ТИ 3 переписывается в регистр 3 предыдущего состояния. По четвертому тактовому импульсу-ТИ 4 происходит формирование сигналов автоматической установки НУЛЯ. Блок 13 автоматической установки нуля в момент совпадения импульсов с нулевых считывающих элементов и крайнего из «п считывающих элементов по тактовому импульсу ТИ4 вырабатывает импульсЫ установки нуля. Сигналь установки нуля с выхода элемента 14 поступают на вход установки нуля реверсивного делителя 8 частоты и реверсивного регистра-накопителя 9. Более подробно работа распределителя 12 и блока 4 формирования импульсов смены состояний кода рассмотрена для варианта п 2. При вращении вала датчика 1 перемещения в одном направлении импульсы с первого считывающего элемента (см. фиг. 2а) слева) опережают импульсы со второго считывающего элемента (фиг. 2 б) слева) и происходит запоминание их текущего состояния в виде циклического кода: 00, 10, 11, 01, 00 и т.д. Состояние «00 означает отсутствие сигналов обоих чувствительных элементов; «10 - наличие сигнала только с первого считывающего элемента; «11 - наличие сигналов обоих считывающих элементов; «01 - Нал ичйёсигнала только со второго считывающего элемента. При перемещении в противоположном направлении происходит уменьщение значений кода, т.е. 00, 01, 11, 10, 00 и т.д. По первому тактовому импулЬсу ТИ 1 (см. фиг. 2з) с расиоеделителя 12 состояние первого счи „-- -- -,,..-...- -. - тывающегб элемента записывается в один канал регистра 2 текущего состояния (фиг 2к), а состояние второго считывающего элемента запоминается триггером другого канала регистра 2 .(см. фиг. 2л). Третьим тактовым импульсом ТИ 3 (см. фиг. 2ж) с распределителя 12 текущее состояние с триггеров обоих каналов регистра 2 переписывается-в соответствующие триггеры регистра 3 предществующего состояния считывающих элементов (см. фиг. 2 м,н). По второму тактовому импульсу ТИ 2 (см. фиг. 2 е) происходит сравнение текущего и предществующего состояний и вырабатываются импульсы смены состояний «+1 или «-1 в зависимости от направления вращения. Формирование импульсов « + 1 (см. фиг. 2 о) и «-1 (см. фиг. 2 п) осуществляется блоком 4 формирования импульсов сменЬ состояний кода. Процессы записи информации в регистры 2 ИЗ и формирование импульсов смены состояний в блоке 4 разнесены во времени и происходят в течение действия соответствующих тактовых импульсов с распределителя 12. I-К - триггеры современных интегральных схем записывают информацию по одному из фронтов тактового импульса, т.е. -в течение небольщой части длительности тактового импульса. Это время неизмеримо меньще периода смены состояний считывающих элементов, определяемого скоростью перемещения. Таким образом, время, в течение котооого кратковременная помеха может исказить информацию о состояниях чувствительных элементов, значительно минимизируется и помехозащищенность преобразователя увеличивается. По четвертому тактовому импульсу ТИ 4 (см. фиг. 2 и) с распределителя 12 в блоке 13 автоматической установки нуля формируются импульсы автоматической установки нуля блока 8 и регистра-накопителя 9. Функционально блок 13 можно представить многовходовой схемой совпадения. Если подать на его входы импульсы ТИ 4, импульсы «промежуточного нулевого положения квантующего элемента (см. фиг. 2 в), импульсы «грубого нулевого положения оси датчика 1 перемещения (см. фиг. 2 г) с соответствующих считывающих элементов, то при совпадении их импульсыТИ 4 проходят на выход блока 13 (см. фиг. 2р). В этом случае обеспечивается однозначность отсчета нулевого положения с точностью до щагового интервала квантующего элемента датчика 1 перемещения. Если же дополнительно на входы блока 13 подать импульсы первой последовательности (см. фиг. 2 а) и инвертированные импульсы второй последовательности, то импульсы установки нуля с выхода блока 13 определяют однозначность нулевого положения с точностью до 1/4 шагового интерйала. Приведем конкретный пример простейшей модификации датчика, в которой п 2, , (. Такой датчик вырабать1вает две последовательности информационных импульсов, сдвинутые одна относительно другой на sr по пространственной фазе. В каждой из этих последовательностей 21600 импульсов на 1 оборот вала датчика. В этом случае период следования импульсов, равный шаговому интервалу (см. фиг. 2 а, б) соответствует 1 угловой минуте поворота входного вала датчика. Период следования импульсов нулевого положения квантуюшего элемента (см. фиг. 2 в) соответствует 1° поворота входного вала. При этом, как известно, (см. фиг. 2 а,в) обеспечивается совпадение «промежуточного нулевого импульса с каждым в данном случае 60-м импульсом первой последовательности. Чувствительный элемент «грубого нулевого положения оси датчика юстируется таким образом, чтобы длительность его импульса была меньше периода следования импульсов (см. фиг. 2 в). Преобразователь с таКИМ датчиком может иметь дискретность отсчета 15, 1. Нулевое положение может фиксироваться в этом случае однозначно с точностью до 15, 1. Отсутствие набегающей погрешности отсчета легко определяется, если в диапазоне перемещений от 0° до 360° существует только одно нулевое значение кода преобразователя. Таким образом, технико-экономический эффект предлагаемого .изобретения заключается в следующем: в повыщении помехозащищенности преобразователя из-за разнесения опер аций записи информации в регистры форми-р1ования импульсов смены состояний и импульсов установки нуля за счет введения распределителя и блоки автоматической установки нуля; - в увеличении разрешающей способности за счет формирования последовательностей импульсов, сдвинутых на ; - в устранении набегающей погрешности отсчета за счет формирования нулевых импульсов ц введения блока автоматической установки нуля. Предлагаемое устройство реализовано в ряде приборов на интегральных схемах, предназначенных для преобразования угловых и линейных перемещений, фазовых сдвигов, величин, ослаблений сигнала в код. Разработанные устройства, благодаря заявленной схеме, более технологичны и дешевы, чем аналогичные по точности приборы, реализующие другие принципы построения. Формула изобретения Преобразователь перемещения в код, содержащий датчик перемещения с системой пространственно-смещенных считывающих элементов, выход которого через регистр текущего состояния подключен к последовательно-соединенным между собой регистру предшествующего состояния и блоку формирования импульсов смены состояний кода, выходы которого через блок формирования знака перемещения подключены ко входам знака блока индикации и блока формирования счетных импульсов, счетные входы которого через реверсивный делитель частоты подключены к выходам блока смены состояний кода, а выходы через реверсивный регистр-накопитель - к входам блока индикации, которые через дешифратор нулевого состояния соединены со входом сброса блока формирования знака перемещения, генератор тактовых импульсов, блок произвольной установки нуля, отличающийся тем, что,с целью повь1шения надежности преобразователя, в него введены распределитель тактовых импульсов, элемент ИЛИ и блок автоматической установки нуля, входы которого подключены к выходу нуля датчика перемещения, а выход - к одному входу элемента ИЛИ, другой вход которого подключен к выходу блока произвольной установки нуля, выход генератора тактовых импульсов соединен со входом распределителя тактовых импульсов, выходы которого подключены соответственно к стробирующим входам блоков автоматической установки нуля, формирования импульсов смены состояний кода и регистров текущего и предшест вующего состояний, выход элемента ИЛИ подключен ко входам сброса реверсивного регистра-накопителя и делителя частоты. Источники информации, принятые во внимание при экспертизе . 1. Авторское свидр-тельство СССР № 260980, кл. G 08 С 9/06, 21.06.68. 2. Патент США, № 3670324, кл. 340-347, 1972.

| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь перемещения в код | 1980 |
|
SU934522A2 |
| Преобразователь перемещений в код | 1984 |
|
SU1181142A1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ СИГНАЛОВ С ПРОГРАММНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ | 1997 |
|
RU2110890C1 |
| Устройство для сортировки информации | 1986 |
|
SU1365075A1 |
| Устройство для определения абсолютного положения вала исполнительного механизма | 1988 |
|
SU1781822A1 |
| Электропривод постоянного тока | 1983 |
|
SU1100697A1 |
| Устройство для вычисления содержания углерода в жидкой стали | 1985 |
|
SU1262525A1 |
| Дискретно-цифровой электропривод | 1985 |
|
SU1350800A1 |
| Устройство для контроля раствора валков прокатного стана | 1983 |
|
SU1088832A1 |
| Электрогидравлический следящий привод | 1985 |
|
SU1269092A1 |
t
-, I ..11 1X f
HH PHT
ь
I
il ти-If
TYTT
