I
Изобретение относится к области машинестроения, а именно к захватам промышленных роботов и манипуляторов.
Известен захват, предназначенный для закрепления деталей, в котором содержатся шарнирно соединенные с корпусом губки, связанные со штоком силового цилиндра 1.
Недостатком указанного захвата является сложность конструкции и большие габариты.
Наиболее близким техническим решением к изобретению является захват, содержаш.ий упругую изогнутую ленту, закрепленную своими концами на корпусе, а средней частью связанную с приводом 2 -л- - -««- - i--w-A- Однако такой захват не обладает достаточной надежностью крепления цилиндрических деталей, вследствие того, что фиксация детали производится касанием с ней ленты в двух точках. Это исключает точное базирование зажимаемой детали и не позволяет надежно зажимать цилиндрические детали, для удержания которых необходимо не менее трех точек контакта с зажимами. Кроме того, фиксация детали гибкой лентой не обеспечивает жесткого базирования детали относительно захвата и тем самым не позволяет точно позиционировать детали на сборочной позиции.
Целью изобретения является повышение надежности крепления цилиндрических деталей.
Указанная цель достигается тем, что каждая концевая частЪ ленты снабжена прижимной планкой, закрепленной на перегибе этой части ленты, а в средней части корпуса выполнена направляющая для средней части этой ленты.
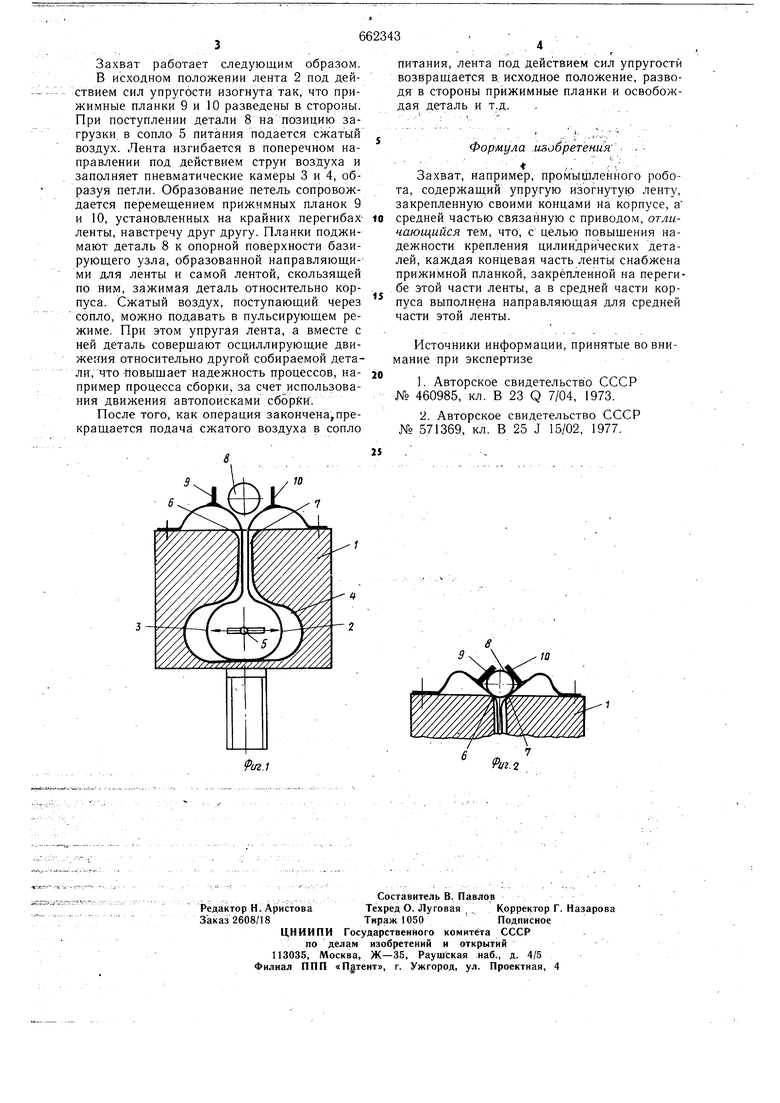
На фиг. 1 изображен обший вид захвата; на фиг. 2 - захват в рабочем положении.
Захват, например, промышленного робота, содержит расположенную в корпусе 1 упругую ленту 2, закрепленную концами на корпусе , и привод, взаимодействующ.ий со .средним перегибом ленты. Привод выполнен в виде пневматических камер 3 и 4 и сопла 5 питания. Захват имеет базирующий узел, выполненный в виде направляющих 6 и 7 для ленты 2, образую цих с ней опорную поверхность зажимаемой детали 8, и прижимных планок 9 и 10, установленных на крайних перегибах ленты. Захват работает следующим образом. В исходном положении лента 2 под действием сил упругости изогнута так, что прижимные планки 9 и 10 разведены в стороны. При поступлении детали 8 на позицию загрузки, в сопло 5 питания подается сжатый воздух. Лента изгибается в поперечном направлении под действием струи воздуха и заполняет пневматические камеры 3 и 4, образуя петли. Образование петель сопровождается перемещением прижимных планок 9 и 10, установленных на крайних перегибах ленты, навстречу друг другу. Планки поджимают деталь 8 к опорной поверхности базирующего узла, образованной направляющими для ленты и самой лентой, скользящей по ним, зажимая деталь относительно корпуса. Сжатый воздух, поступающий через сопло, можно подавать в пульсирующем режиме. При этом упругая лента, а вместе с ней деталь соверщают осциллирующие движения относительно другой собираемой детали, что-повыщает надежность процессов, например процесса сборки, за счет использования движения автопоисками сборки. После того, как операция закончена,прекращается подача сжатого воздуха в сопло
W
U2.1
питания, лента под действием сил упругости возвращается в исходное положение, разводя в стороны прижимные планки и освобождая деталь и т.д. Формула млобретения . Захват, например, промышленного робота, содержащий упругую изогнутую ленту, закрепленную своими концами На корпусе, а средней частью связанную с приводом, отличающийся тем, что, с целью повыщения надежности крепления цилиндрических деталей, каждая концевая часть ленты снабжена прижимной планкой, закрепленной на перегибе этой части ленты, а в средней части корпуса выполнена направляющая для средней части этой ленты. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 460985, кл. В 23 Q 7/04, 1973. 2.Авторское свидетельство СССР № 571369, кл. В 25 J 15/02, 1977.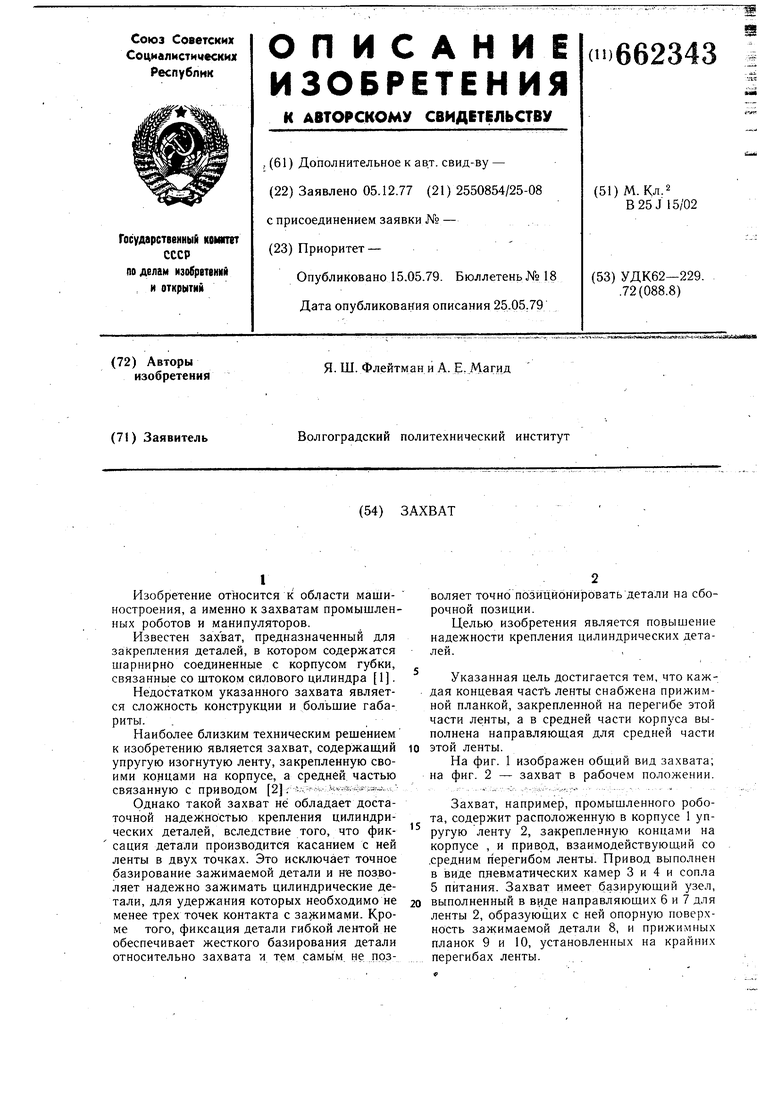
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2008 |
|
RU2371305C1 |
| Групповой схват промышленного робота | 1981 |
|
SU975389A1 |
| СХВАТ МАНИПУЛЯТОРА | 2007 |
|
RU2347674C1 |
| Загрузочно-разгрузочное устройство к горизонтальному поворотному столу | 1984 |
|
SU1180226A1 |
| Гибкий производственный модуль | 1988 |
|
SU1593915A1 |
| Схват промышленного робота | 1979 |
|
SU781055A1 |
| Многопозиционное захватное устройство | 1981 |
|
SU994254A1 |
| Устройство для крепления изделий под сварку | 1990 |
|
SU1787728A1 |
| Схват манипулятора | 1989 |
|
SU1722811A1 |
| Зажим | 1990 |
|
SU1812034A1 |
