Изобретение относится к машиностроению и может быть использовано в роботах и манипуляторах для обслуживания технологических процессов.
Известен схват манипулятора, содержащий корпус, упругую изогнутую ленту, имеющие прижимные планки, направляющие и привод.
Однако известный схват не обеспечивает сохранения постоянной координаты центра деталей различных типоразмеров, что ограничивает его технологические возможности.
Наиболее близким по технической сущности к предлагаемому является схват манипулятора, содержащий корпус, гибкую ленту с прикрепленными к ней пальцами, привод, а также механизм сведения-разведения пальцев, выполненный в виде системы опорных роликов, огибаемых гибкой лентой, и центрального прижимного элемента, причем концы гибкой ленты подпружинены относительно корпуса, а средняя часть ленты через опорные ролики механизма сведения-разведения пальцев жестко со- единена с центральным прижимным элементом, связанным с приводом.
Недостатком схвата является то, что его сложно использовать для зажима различных деталей за внутреннюю поверхность разного размера, так как усилие зажима будет зависеть от величины развода пальцев и, следовательно, от деформации пружин. Вытяжка пружин схвата в процессе эксплуатации снижает надежность его работы. Надежность и точность зажима детали в схвате в значительной степени зависит и от упругих изгибных деформаций гибкой ленты в зоне ее крепления к пальцам схвата. возникающих под действием усилий зажима в месте контакта пальцев с деталью, Привод схвата размещен в непосредственной близости от пальцев, что ухудшает динамические характеристики манипулятора, увеличивая перемещаемые массы и инерционность схвата. Привод, гибкая лента и опорные ролики открыты и подвергаются загрязнению, что также снижает надежность и долговечность схвата.
Цель изобретения -- расширение технологических возможностей за счет обеспечения регулируемого усилия зажима как за наружную, так и за внутреннюю поверхности.
Цель достигается тем, что в схвате манипулятора, содержащем механизм, сведения-разведения пальцев схвата, включающий приводной элемент, жестко связанный с основной гибкой лентой, согласно изобретению механизм сведенияразведения пальцев схвата снабжен двумя ведомыми роликами, на которых смонтированы пальцы схвата, при этом приводной элемент механизма сведения-разведения
пальцев схвата выполнен в виде ведущего ролика, а ведомые ролики связаны между собой дополнительной гибкой лентой, соответственно смонтированной на них своими концами, причем направления навивки ос0 новной и дополнительной гибких лент на
каждом ведомом ролике разнонаправлены.
На фиг. 1 изображен схват в разрезе; на
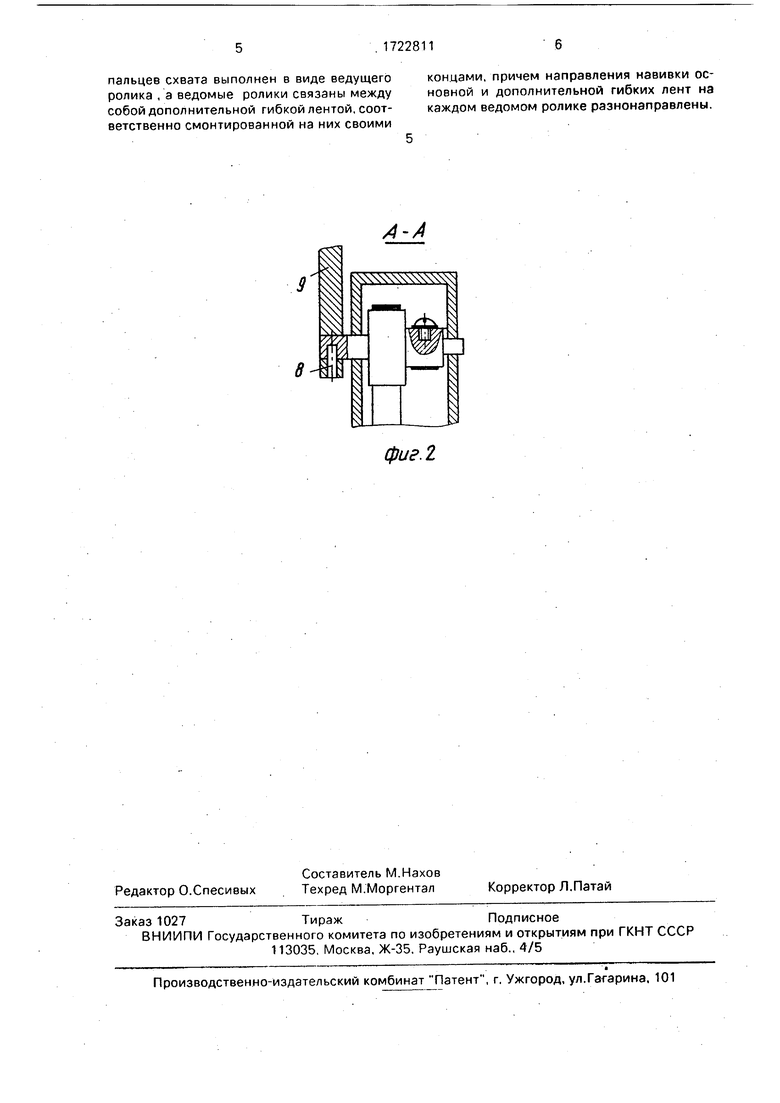
фиг. 2 - крепление пальцев к ролику, разрез
А-А на фиг. 1.
5Схват содержит расположенный в корпусе 1 механизм сведения-разведения пальцев схвата, включающий приводной ролик 2 с прикрепленной к нему с помощью винта 3 основной гибкой лентой 4, а также ведомые
0 ролики 5 и 6, к которым прикреплена лента 4 с помощью винтов 7. С роликами 5 и 6 жестко связаны с помощью штифтов 8 пальцы схвата 9. Дополнительная гибкая лента 10, жестко закрепленная на роликах 5 и 6 с
5 помощью винтов 11, обеспечивает связь между ними. Пальцы 9 взаимодействуют с деталью 12, зажимаемой на наружной поверхности, или с деталью 13, зажимаемой по внутренней поверхности.
0Схвэт работает следующим образом.
При вращении приводного ролика 2 против часовой стрелки основная лента 4 сматывается с ролика 5, вращая последний
5 по часовой стрелке. При этом дополнительная лента 10 наматывается на ролик 5, сматываясь при этом с ролика 6, вращая последний против часовой стрелки. В свою очередь, лента 4 наматывается на ролик 6 и
0 сматывается с приводного ролика 2. За счет поворота роликов 5 и 6 соответственно по часовой и против часовой стрелки производится сведение жестко закрепленных с роликами пальцев 9 и зажим детали 12.
5 Разведение пальцев 9 и зажим детали 13 осуществляется аналогично при вращении приводного ролика 2 по часовой .стрелке. Формула изобретения Схват манипулятора, содержащий меха0 низм сведения-разведения пальцев схвата, включающий приводной элемент, жестко связанный с основной гибкой лентой, отличающийся тем, что, с целью расширения технологических возможностей за счет
5 обеспечения регулируемого усилия зажима деталей как за наружную, так и за внутреннюю поверхности, механизм сведения-разведения пальцев схвата снабжен двумя ведомыми роликами, на которых смонтированы пальцы схвата, при этом приводной элемент механизма сведения-разведения
пальцев охвата выполнен в виде ведущего ролика , а ведомые ролики связаны между собой дополнительной гибкой лентой, соответственно смонтированной на них своими
концами, причем направления навивки основной и дополнительной гибких лент на каждом ведомом ролике разнонаправлены.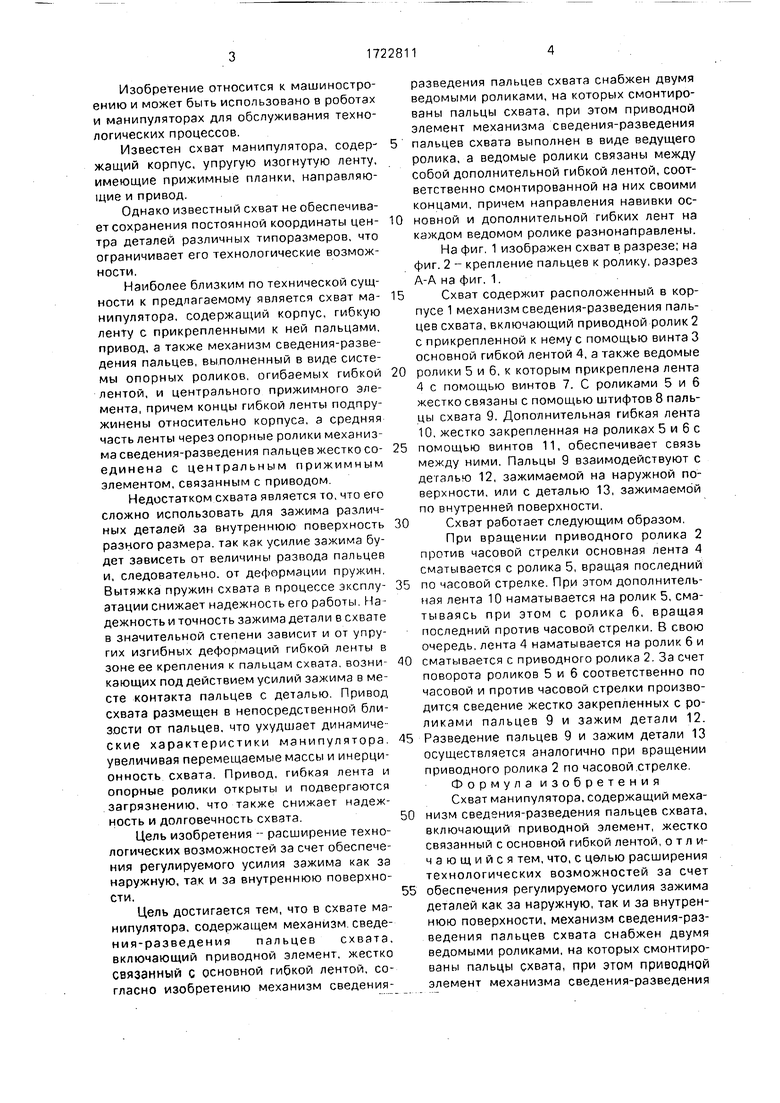
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство манипулятора | 1988 |
|
SU1572807A1 |
| Схват манипулятора | 1984 |
|
SU1184664A1 |
| Манипулятор к прессу | 1986 |
|
SU1346321A1 |
| Кистевой узел манипулятора | 1990 |
|
SU1743856A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Исполнительный орган промышленного робота | 1987 |
|
SU1493462A1 |
| Схват манипулятора | 1981 |
|
SU965655A1 |
| Устройство для изготовления витых чувствительных элементов | 1983 |
|
SU1125084A1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ПЕРЕДВИЖЕНИЯ ГРУЗА | 2001 |
|
RU2194005C2 |
Изобретение относится к машиностроению и может быть использовано в роботах и манипуляторах для обслуживания технологических процессов. Цель изобретения - расширение технологических возможностей за счет обеспечения регулируемого усилия зажима как за наружную, так и за внутреннюю поверхности. Схват содержит корпус 1, расположенный в ней механизм сведения - разведения пальцев схвата, включающий приводной ролик 2 и ведомые ролики 5 и 6, связанные между собой основной гибкой лентой 4. На ведомых роликах 5 и 6 смонтированы пальцы схвата. Ведомые ролики связаны между собой дополнительной гибкой лентой 10, при этом направления навивки основной и дополнительной гибких лент на каждом ведомом ролике разнснап- равлены. При вращении приводного ролика 2 против часовой стрелки основная лента 4 сматывается с ролика 5. а дополнительная лента 10 наматывается на ролик 5. В свою очередь лента 4 наматывается на ролик 6, т.е. производится сведение пальцев 9 и зажим детали. 2 ил. (Л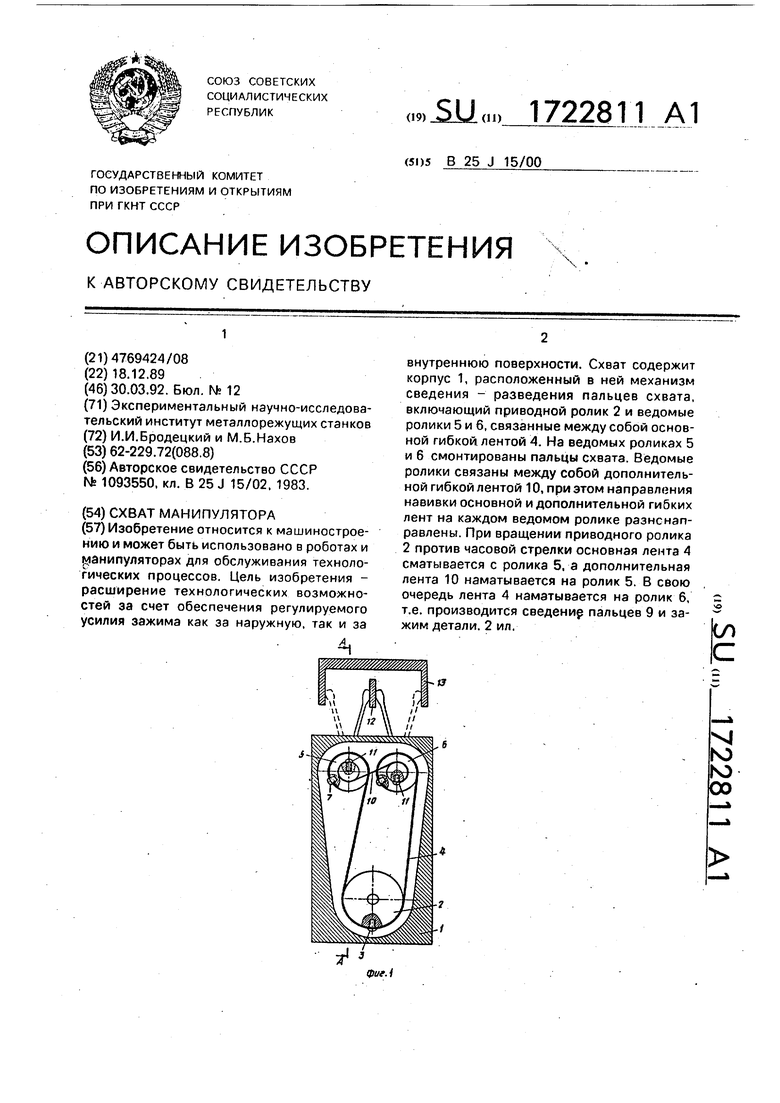
А-А
фиг.2
| Схват манипулятора | 1983 |
|
SU1093550A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Гребенчатая передача | 1916 |
|
SU1983A1 |
