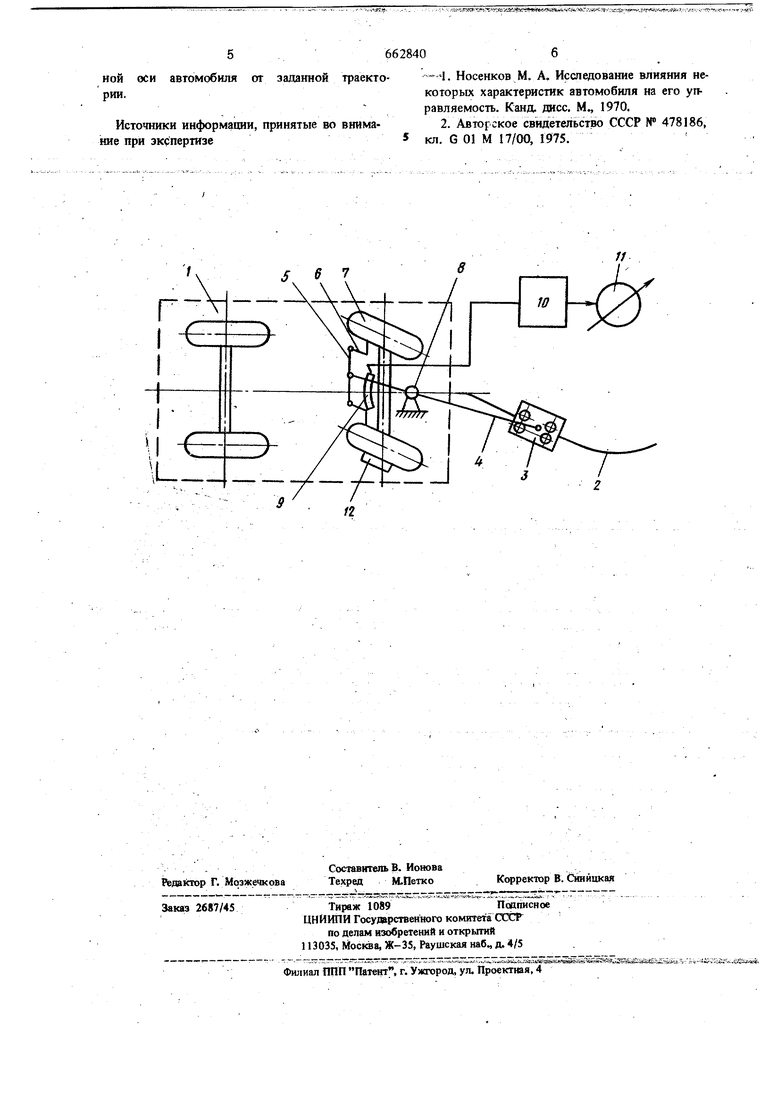
характеристик движения автомобиля, а выход с регистрирующим прийром 2. Недостатком указанного устройства йвляётся fS, Ч1б bito пЬзволяёт определить указанньй угол лишь при 1фям6лин№н01йИ1 йМй И Жя определения указанного угла необходимо серию заездов, измеряя угол riojebpota рулевого колеса, который в силу индивидуальных особенностей водителя в различный заездах бы im различен. Цель изобретеШ1я -ТтбвйшёЖГтечиоШ и усйорйёниё п юцесса йзйёренйя при ,аизто мЬбиля пЬ криво1ганеЙной трлёктрш. Это достигается тем, что в способе для опредёлёнйяс1Йдяёго интегрального угла отклонения продольной оси автомобиля от заданной траекторий измеряют текущие значёгая углов отклонения продольной оси автомобиля при движении последнего по криволинейной направляющей, после чего определяют укайнный сред.НИИ интегральньш угол. Устройство для осуществления способа снабжено тележкой, установленной с возможностью деремёщёния по криволинейной направляющей, жестко закрепленной ни полютне дороги, и продольнь1м pibwaroM, срейияя часть issitopbiro шщ) нирно соеданена с кузовом автомобиля, один из концов - с тележкой, а другой - связан с поперечной тягой рулевой трапещш автомобиля f . . f --..f:- ; :-r- - - и с измерителем характеристик даи)к:енйя автомобиля, вытюлненным в виде датчика угла отктюнеш1я продольной оси автомобиля от заданЙ6Й траектории. На чертеже схематично изображено устройства для определения среднего интегрального угла отклонения 1фодольной оси автомобиля от зада ной траектЬрии. ,, f,. - ,;,...А ;j.-.:v.L ;. -..„(..ь.,::;;йлайг;азгм гк«.--Ус1ройство для исследования автомобиля вклтает жестко закрепленную на полотне доро П рт фильчую направляющую 2, тележку 3, ра мещенную с возможностью продольного перемещения на профильной направляющей, прод(&1ьиьм рьпаг 4, один конец которого соединен с тележкой 3, а другой - связан через попереч1|ую Тягу рртевой трапеции 5 и поворотные рь14аги ё с управляющими колесами 7, закрёпленнь1й на кузове автомобиля щарнир 8, вокруг которого поворачивается продольный рычаг 4, датчик 9 угйа Ьтклонения продол,ьндй оси ттомобиля от заданного направления, интегрируюшдай блок 10, связанный с датчиком 9, регистрирующий прибор 11 и датчик 12 скорости ав мобиля........-.. - . ..... На полотне дороги устанавливают направляющую 2, и(Л1тирующую заданную траекторию движения автомобиля. Продольный рычаг 4 при HanHiiiffl нёпрямблинейной заданной траектории .или бокового увода автомобиля повсграчивает Й &зй - -
662840 ся вокруг шарнира 8 и перемещает поперечную тягу рулевой трапеции 5 в то перечном направлении, что приводит к повороту рьиагов 6 и 5травляемых колес 7, В результате образуется Эамййута й система автомат-автомобиль. Продольная ось автомобиля при его движений стремитя снова .занять положение, совпадающее с заданной траекторией. Сигнал об угле отклонения продольной оси.автомобиля определяется датчиком 9 .и подается через интегрирующий блок 10 Н регистрирующий прибор И. Эффективность предложенного способа и устройства заключается ,в сокращении продолжительности испытаний автомобиля за счет сведения до минимума количества заездов, повьпиепий )йти и точности результатов путем исключения влияния индивидуальных особенности водителя нарезультат йспьпганий и распространении возможности далучения результатов на случай непрямолинейного Движения автомобиля. Формула .изобретения 1. Способ опреде;|«шя cpWHero; интегрального угла отклонения продольной оси автомобиля от заданной ТраектЬрии, включающий операции; измерения и регистрации характеристик движения автЬмобйяя При ййияНёнгаи Последнего по заданной траектории и определевдй среднего ййтёТралЬного угла отклонения продольной оси . автомобиля от задашой траектории, о t л ич а ю щ и и с .я тем, что, с целью повышения точности и ускорения щюцесса {13мерешя При движении автомобиля го крив(инейной траекторий, измёряют текуидае значения углов откло ™ Щ°В95У ° автомобиля при движеяии шследаёго по (срйболинейной направляющей, после чего определяют указанный средний интегральный угол.. 2. Устройство для осуществления способа по п. 1, садержащее интегрирующий блок, вход котОрогО сшязан с выходом измерителя характе ристик движения автомобиля, а выход - с регистрирующим йрибором, о т л и ч а ю щ е еС я тем, то оно снабж |(к тележкой, установленной с возможностью перемещения по криволинейной направляющей жестко закрепленной на полотне дороги, и продольным рычагом, средняя часть которого щарнирНо соединена с кузовом автомобиля, один из концов - с тележкой, а другой - связан с поперечной тягой рулевой Трапеции автомобиля и с измерителем характеристик движения автомобиля, вьшолненным в виде датчика угла отклонения продоль5ной оси автомобиля от заданной рии. Источники информации, принятые во ние при экспертизе траекто- I. Носенков М. А, Исследование влияния невнима-2. Авторское свидетельство СССР N 478186, 662840б которых характеристик автомобиля на его управляемость. Канд. дисс. М., 1970. кл. G 01 М 17/00, 1975.