(54) ЦЕПНОЙ КОНВЕЙЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| УСТАНОВКА ДЛЯ ГРОХОЧЕНИЯ ПЕСКОВ | 1991 |
|
RU2011433C1 |
| САМООЧИЩАЮЩИЙСЯ КРУТОНАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2005 |
|
RU2279393C1 |
| Забойный пластинчатый ковейер | 1975 |
|
SU662441A1 |
| Пластинчатый конвейер | 1974 |
|
SU603617A1 |
| ПОЛОЧНЫЙ ЛЕНТОЧНЫЙ ЭЛЕВАТОР | 2009 |
|
RU2406672C1 |
| Машина для набора комплектов печатной продукции | 1988 |
|
SU1676980A1 |
| Грузонесущий орган пластинчатого конвейера | 1983 |
|
SU1102725A1 |
| Линия для настилания и раскроя полотна | 1978 |
|
SU791579A1 |
| Пластинчатый конвейер | 1977 |
|
SU619397A1 |

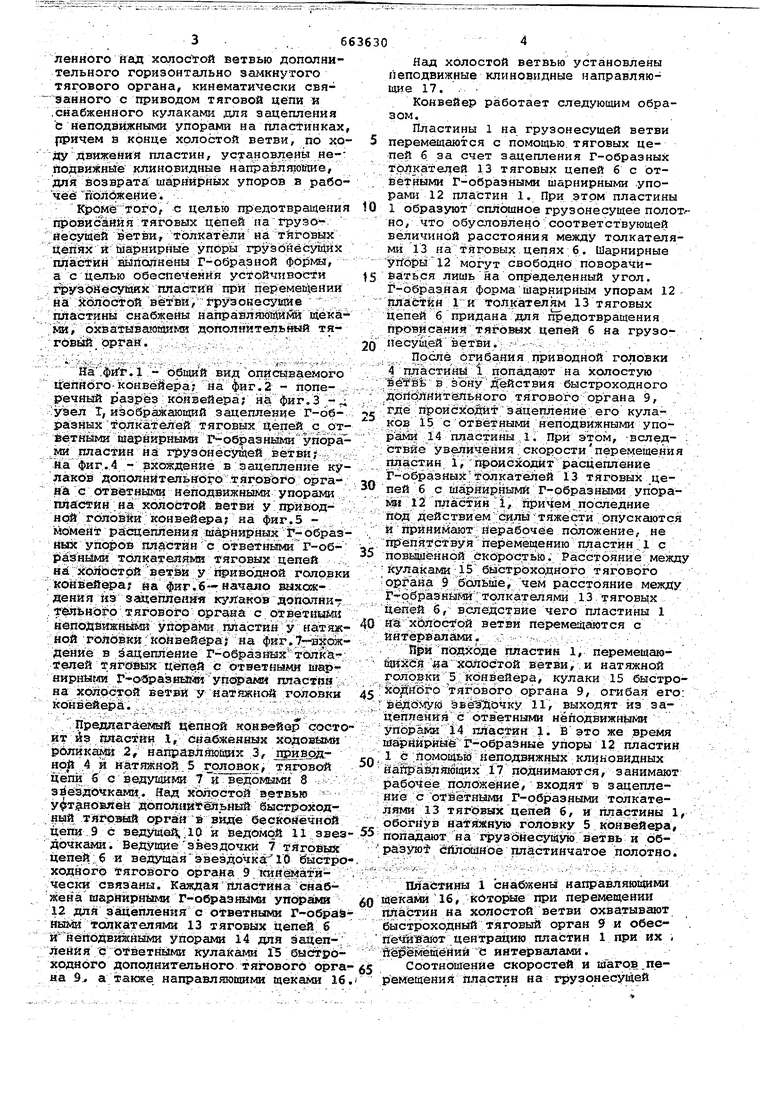
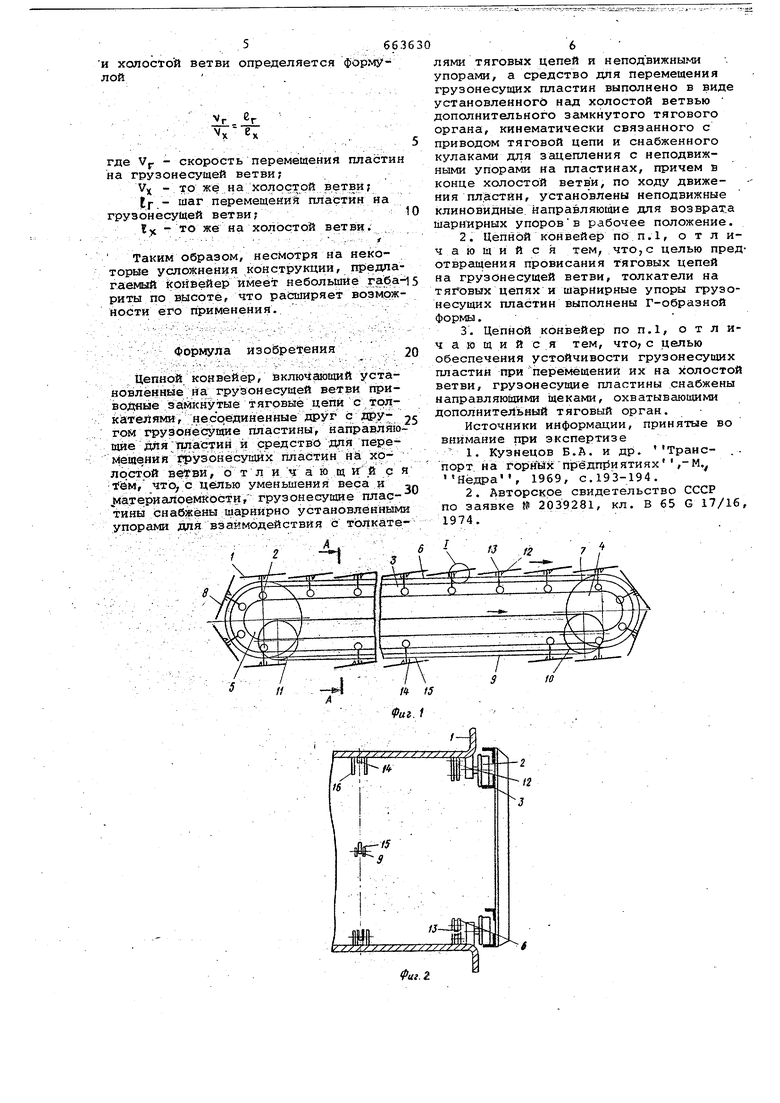
Изобретение относится к транспортирующим машинам непрерывного дей ствия, в частности, к цепным конвейерам. Известен цепной конвейер, включающий пластины, приводную и натяжную головки, бесконечные тяговые цепи, грузонесущее полотно. Конвейер снабжен направляющими для поддержания, пластинчатого полотна. Пластины не: соединены друг с другом, прикреплены к тяговым цепям и образуют сплошное полотно на грузонесущей и холостой ветвях 1 . Основным недостатком этого конвей ера является большая погонная масса и большая материалоемкость. Это обус (JlJJi OU-IC i J4VA A -i - - ловлено тем, что основную массу кон.«..«. .-.. 1.Л КЯ А Г V Л Н вейера составляет сплошное полотно из пластин, причем полезную функцию оно выполняет только на грузонесущей ветви.„ Известен также цепНой конвейер, включающий установленные на грузонесущей ветви приводные горизонтально замкнутые тяговые цепи с толкателями несоединенные друг с другом груэоне сущие пластины и средство для перемещения грузонесущи-х пластин на холостой ветви 2. В этом конвейере средство для перемещения грузонесущих пластин на холостой ветви выполнено в виде гравитационного спуска, по которому пластины возвращаются на грузонесущую ветвь конвейера. Такое выполнение позволяет устранить недостаток ранее сэписанного конвейера, поскольку на холостой ветви находится минимально возможное количество пластин. Однако, для перемещения пластин на холостой ветви со скоростью, превышающей Скорость перемещения пластин на грузонесущей ветви, необходим большой угол наклона трассы гравитационного спуска, что при большой протяженности конвейера приводит к значительному увеличению его высоты. Целью изобретения является уменьшение габаритов конвейера. Указанная цель достигается тем, что грузонесущие пластины снабжены шарнирно установленными упорами, для взаимодействия с толкателями тяговых цепей, и неподвижными упорами, а с-рёдство для перемещения грузонесущих пластин выполнено в виде установ-. 3.6 ленного йаД холостой ветвью дополнительного горизонтально замкнутого тягового органа, кинематически связанного с приводом тяговой цепи и .снабженного кулаками для зацепления С неподвижными упорами на пластинках рричем а конце холостой ветви, по ходудвйясения пластин, уста.новлвиы не-; подвняснйе клиновидные нащэавляютйне, для возврата шарнирных упоров в рабочее положение. Кроме того, с целью предотвраадения провисания тяговых цепей па груэонесуией ветви, толкатели на тйговых цепях и шарнирные упоры грузойёс пДих пластин выполнены Г-обраэной формы, а с целью обеспечения устойчивости грузонесуйих пластин при перемещении на холостой ветви, грузонесуше пластины снабжены направляшшми щекаtm, охватывающими дополнительный тяговый орган. . ч , - ,t . - общий вид описываемого цепного-конвейера; на фиг.2 - поперечный разрез конвейера; на фиг.З узел Т, изображающий зацепление Г-образных толкателей тяговых цепей с от йетными шарнирными Г-образннми упора ми пластин на грузонесущей ветви; на фиг.4 - вхождение в зацепление ку лаков дополнительного тягового органа с ответными неподвижными упорами пластин на холостой ветви у приводной ГОЛОВИН конвейера; на фиг.З момент расцепленйя шарнирных 1 -образ ных упоров пластйн с ответными Г-образными толкателями тяговых цепей на холостой ветви у Щ)иводной головки .конвейера; на фиг.б-начало выхсйсдения из зацештеиня кулаков допоггнкт тельного тягового органа с ответными аеподвижньши упорами пластин у натяж ной гояовки конвейера; не фиг.Т -вхож дение в зацепление Г-образных толкателей тягбаых цепей с ответными шар нирныгяи Г-овразнь йи пяастйн на холостой ветви у натйжноа головки конвейера. Предлагаемый цепной нонвейор состо ит из пластин .1, снабженных ходог гми роликами 2, направляющих 3, jigHj6.oaHo|t 4 и натяжной 5 головок, тяговой цепи б с ведущими 7 и вед6мы1 ш 8 звездочками. Над холостой ветвью у т новяей дополнительный быстроходный тяговый орга в виде бесконечной цепи 9 с ведущей,.10 и ведомой 11 звез дочками. Ведущиезвездочки 7 тяговых цепей б и ведущаязвездочка 10 быстро ходного тягового органа 9 кинематически связаны. Каждая пластина снабжена шарнирными Г-обраэными упорами 12 для зацепления с ответными Г-обраЭ толкателями 13 тяговых цепей S и нейодвижными упорами 14 для зацепления с ответными кулаками f5 быстроходного дополнительного тягового орга на 9 а также направляющими щеками 16 Над холостой ветвью установлены неподвижные клиновидные направляющие 17. . Конвейер работает следующим образом. Пластины 1 на грузонесущей ветви перемещаются с помощью тяговых б за счет зацепления Г-образных Толкателей 13 тяговых цепей б с отбетными Г-образными шарнирными .упоpaNDj 12 пластин 1. При этом пластины 1 образуют сплошное грузонесущее полот--но, что обусловлено соответствующей величиной расстояния между толкателями 13 на тяговых цепях б. Шарнирные уггоры12 могут свободно поворачиеать.ся Лишь на определенный угол. Г-образйая форма Шарнирным упорам 12пластин 1 и толкателям 13 тяговых Цепей б придана для предотвращения провисаний тяговых цепей б на грузопесущей ветви. После огибания приводной головки 4 пластины 1 попадают на холостую в зону действия быстроходного дойолнитеЛьного тягового органа 9, где происходит зацепление его кулаков 15 с ответными неподвижными упорами 14 пластины 1. При этом, вслед- ; ствие увеличения скоростиперемещения пластин 1, происходит расцепление Г-образйЫ54толкателей 13 тяговых цепей б с шарнирными Г-образными упорами 12 пластин 1, причем последние пЗД действием силы тяжести опускаются и принижают нерабочее положение, не препятствуя перемещению пластин 1с повышенной скоростью. Расстояние между кулаками 15 быстроходного тягового органа 9 больше, чем расстояние между Г--образными толкателями 13 тяговых цепей 6, вследствие чего пластины 1 tfSf. холостой ветви перемещаются с интервалами. При подходе пластин 1, перемещаювдхся на холостой ветви, и натяжной головки 5 конвейера, кулаки 15 быстрохо його тягового органа 9, огибая его: ведомую зве очку 11, выходят из зацепления с ответные неподвижными упора№ 14 пластин 1. Ё это же время шарнирные Г-обрайные упоры 12 пластИй 1 с йомощыо неподвижных клиновидных на фавляющих 17 поднимаются, занимают рабочее положение, входят в зацепление с ответными Г-образными толкателями 13 тяговых цепей б, и пластины 1, обогнув на1 яжную головку 5 конвейера, попадают на грузонесущую ветвь и образую сйлошное пластинчатое полотно. Пйастины 1 снабжены направляющими щеками 16, которые при перемещении пластин на холостой ветви охватывают быстроходный тяговый орган 9 и обеспеЧййают цевтрацию пластин 1 при их . перемещении е интервалами. Соотношение скоростей и шагов перемещения пластин на грузонесущей и холостой ветви определяется форму лойгде Vf. - скорость перемещения пласти на грузонесуией ветви; V - то же на холостой ветви; If - шаг перемещений пластин на грузонесущей ветви; ЕХ - то же на холостой ветви. .- . - ; : - . - : 1 Таким Образом, несмотря на некоторые усложнения конструкции, гаемый йрнбейер имеет небольшие габа риты по высоте, что расширяет возмож ности его применения. Ф ормула и 3 о бр еТен и я Цепной конвейер, вклю сающий установленные на грузонесущей ветви приводные йййкнутые тяговые цепи с толкателями, несоединенные друг с й)угрм грузонёкзупдае пластины; напра в ляю идае длятшастий и средство Для переЦещенйй фузонёсущйх плайтин н& хрлрстой аефви, 6 т ли ч а и щ и; и с тём, что, с Целью уменьшения веса и 5а5герйалоемкости, грузонесущие плае тины снабжены шарнйрно установленныьо упорами для взаимодействия с толкате
Фиг. г лями тяговых цепей и неподвижными упорами, а средство для перемещения грузонесущих пластин выполнено в виде установленного над холостой ветвью дополнительного замкнутого тягового органа, кинематически связанного с приводом тяговой цепи и снабженного кулаками для зацепления с неподвижными упорами на пластинах, причем в конце холостой ветви, по ходу движения пластин, установлены неподвижные клиновидные, направляющие для возврата Шарнирных упоровв рабочее положение. 2.ЦепнОй конвейер пО п.1, о т л ича Ю Щи и с я тем, что,с целью предотвращения провисания тяговых цепей на грузонесущей ветви, толкатели на тягловых цепях и шарнирные упоры грузонесущих пластин выполнены г-образной формы. 3.Цепной конвейер по п.1, о т л ич а ю щ и и с я тем, что с целью обеспечения устойчивости грузонесущих пластин При перемещений их на холостой ветви, грузонесущие пластины снабжены направляющими щеками, охватывающими дополнительный тяговый орган. Источники информации, принятые во внимание при экспертизе 1. Кузнецов Б.А. и др. Транс- .. порт на орныЯ прёдп15и ятиях ,- М. Яегфа, 1969, с.193-194. 2. Авторское свидетельство СССР по заявке № 2039281, кл. В 65 G 17/16, 1974.
4 ---- / -уС-1
:2О
/
f/
-//
