(54) ШАГОВЫЙ КОНВЕЙЕР
| название | год | авторы | номер документа |
|---|---|---|---|
| Вертикальный накопитель для штучных грузов | 1985 |
|
SU1303504A1 |
| Шаговый конвейер | 1977 |
|
SU747777A1 |
| Пакеторазборная машина для штучных грузов | 1974 |
|
SU667469A1 |
| Шаговый конвейер | 1971 |
|
SU439446A1 |
| Станок для притирки кранов | 1980 |
|
SU944881A1 |
| Шаговый конвейер | 1990 |
|
SU1787881A1 |
| Шаговый конвейер | 1981 |
|
SU967905A1 |
| Вертикальный накопитель | 1989 |
|
SU1698148A1 |
| Шаговый конвейер | 1978 |
|
SU749757A1 |
| Шаговый конвейер | 1980 |
|
SU912606A1 |
Изобретение относигся к шаговым конвейерам с циклически (возвратнопоступательно) движущимися грузоноси- телями.
Известен шаговый конвейер, включающий прнвод и две подвижные рамы. Этот конвейер имеет два отдельных привода: гидравлический, сообщающий одной раме вертикальный подъем, и электромеханический, сообщающий другой раме горизонтальное перемещение 1 .
Наличие двух приводов усложняет конструкцию и снижает надежность работы конвейера, так как трудно обеспечить синхронизацию движения рам.
Наиболее близким рещением из известных является шаговый конвейер, вклк чающий привод, на валу которого установлены кулачки, подвижные несущую и поддерживающую рамы, кривошипно-шатунный механизм, соединенный с несущей рамой, и рычажную систему, соединенную с поддерживающей рамой 2.
Недостаток указанного конвейера заключается в том, что наличие в кри- воишпно-шатунном механизме коленчатых валов, продольных тяг, шатунов, коленчатых валов с качающимися роликами, зубчатых колес, а также конструкций подвески рамы, лежащей на эксцентриковых роликах и перемещающейся через систему тяг и рычагов, значительно усложняют конструкцию конвейера.
Целью изобретения является повьЕие ние надежности работы и упрощенна конструкции конвейера.
Указанная цель достигается тем, что рычажная система поддерживающей рамы выполнена в виде щарнирного параллело-, грамма, связанного с одной стороны с рамой, а с другой - с кулачком.
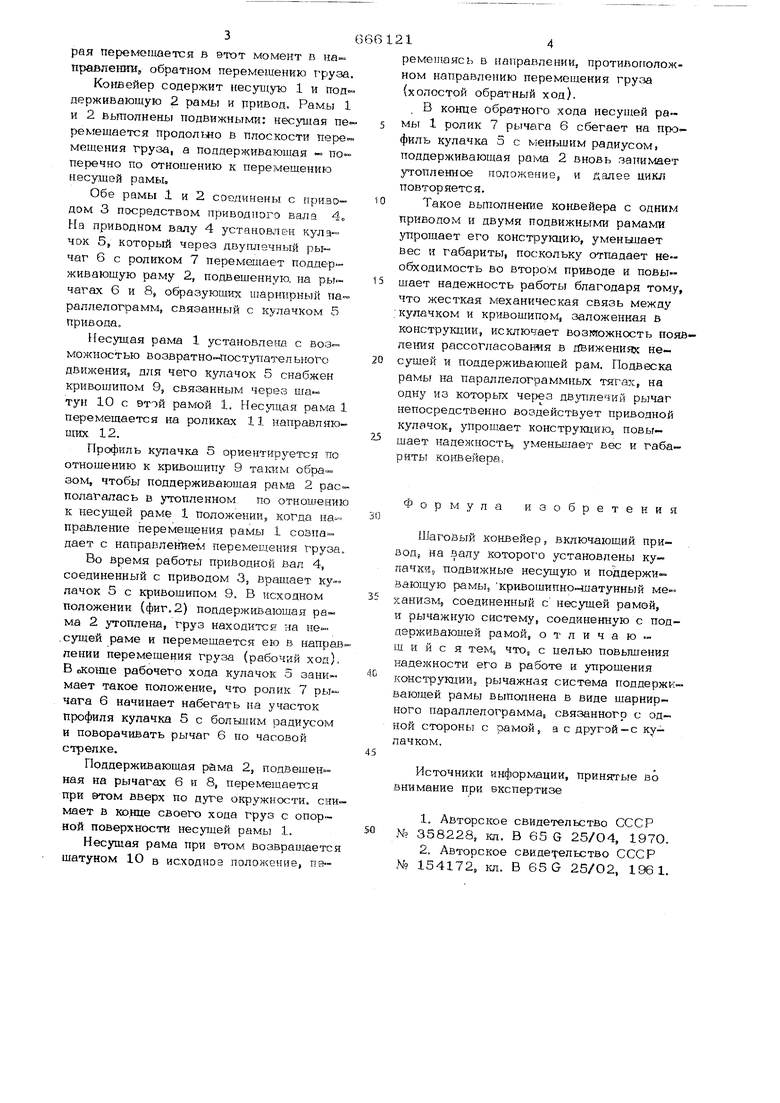
На фнг. 1 изображен общий вид ков- вейера; на фиг. 2 - разрез А-А фиг. I (поддерживающая рама утоплена и груз перемешается несущей рамой); на фиг, 3 - то же, но поддерживающая рама приподнимает груз над несущей рамой, кото- рая перемещается в втот момент в направлении, обратном перемещению груза Конвейер содержит несущую 1 и поддерживающую 2 рамы и привод. Рамы 1 и 2 вьгаопнеаы подвижными: несущая пе ремещается продольно в плоскости перемещения груза, а поддерживающая - поперечно по отношению к перемещению несушей рамьи Обе рамы 1 и 2 соединены с приво- дом 3 посредством приводного вала 4, На приводном валу 4 установлен кулачок 5, который через двупланный рычаг 6 с роликом 7 перемещает поддерживающую раму 2, подвешенную, на рычагах 6 и 8, образующих шарнирный па раллелограмм, связанный с кулачком 5 привода. Несущая рама 1 установлена с возможностью Возвратно-поступательного движения, для чего кулачок 5 снабжен кривошипом 9, связанным через шатун 10 с втой рамой 1. Несущая рама 1 перемешается на роликах 11 направляющих 12. Профиль кулачка 5 ориентируется по отнощению к кривошипу 9 таким образом, чтобы поддерживающая рама 2 рас полагалась в утопленном, по отношению к несущей раме 1 положении, когда направление перемещения рамы 1 совпадает с направлением перемещения груза Во время работы приводной вал 4, соединенный с приводом 3, вращает кулачок 5 с кривощипом 9. В исходном положении (фиг. 2) поддерживающая рама 2 утоплена, груз находится на не, сущей раме и перемешается ею в направ лении перемещения груза (рабочий ход) В сжонце рабочего хода кулачок 5 занимает такое положение, что ролик 7 рычага 6 начинает набегать на участок профиля кулачка 5 с большим радиусом и поворачивать рычаг 6 по часовой стрелке. Поддерживающая рама 2, подвешенная на рычагах 6 и 8, перемешается при этом вверх по дуге окружности, сни мает в конце своего хода груз с опорной поверхности несущей рамы 1. Несущая рама при втом возвращаетс шатуном 1О в исходное положение, пе14ремешаясь в направлении, противоположном направлению перемещения груза (холостой обратный ход). В конце обратного хода несушей рамы 1 ролик 7 рычага 6 сбегает на профиль кулачка 5 с меньшим радиусом, поддерживаюшая рама 2 вновь занимает утопленное положение, и далее цикл повторяется. Такое выполнение конвейера с одним приводом и двумя подвижными рамами упрошает его конструкцию, уменьшает вес и габариты, поскольку отпадает необходимость во втором приводе и повышает надежность работы благодаря тому, что жесткая механическая связь между кулачком и кривошипом, заложенная в конструкции, исключает возможность появления рассогласования в йвиженияк несущей и поддерживающей рам. Подвеска рамы на параллелограммных тягах, на одну из которых через двуплечий рычаг непосредственно воздействует приводной кулачок, упрощает конструкцию, повышает надежности уменьшает вес и габариты конвейера. Формула изобретения Шаговый конвейер, включающий привод, на валу которого установлены кулачки, подвижные несущую и поЬдерживающую рамы, кривошипно-шатунный механизм, соединенный с несущей рамой, и рычажную систему, соединенную с поддерживающей рамой, отличающийся тем, что, с целью повышения надежности его в работе и упрощения ксянструкции, рычажная система поддерживающей рамы Выполнена в виде шарнирного параллелограмма, связанногр с одной стороны с рамой, ас другой-с кулачком. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 358228, кл. В 65 G 25/04, 197О. 2.Авторское свидетельство СССР 154172, кл. В 65G 25/О2, 1961. №
АА
f 1
-тггггггг, Tfrrrrrr
л II IIIIII X
2
А -А
Г 1
Фиг.З
