i Изобретение относится к устройствам для транспортирования штучных крупногабаритных грузов.
Известен шаговый конвейер для циклического перемещения штучных грузов с возможностью реверсирования направления грузов, содержащий неподвижные опоры и подвижные опоры с двумя приводами, предназначенными для подъема и горизонтального перемещения грузов tl.
Однако из-за наличия двух приводов на конвейере, которые должны работать согласованно в каждом цикле движения подвижных опор с остановкой каждого привода, для конвейеров зтого типа характерна сложность конструкции и управления.
Наиболее близким к изобретению по технической сущности является шаговый конвейер, содержащий соединеннук) с приводом нижнюю ходовую, взаимодействующую с ней верхнюю опорную часть, наклонные направляющие, упор и кулачок с нижней наклонной поверхностью и осью 2.
Известный конвейер имеет один привод, обеспечивающий как подъем верхней опорной части, так и ее горизонтальное перемещение. Он обладает надежностью при транспортировке крупногабаритных тяжелых грузов, однако имеет ограниченные функциональные и технологические возможности, обусловленные односторонным направлением движения грузов.
Целью изобретения является обеспечение реверсирования движения i-py10за в противоположные стороны.
Поставленная цель достигается тем, что шаговый конвейер, содержащий связанную с приводом нижнюю ходовую часть, взаимодействующую с ней верх15нюю опорную часть, наклонные направля(ощие, упор и кулачок с нижней наклонной поверхностью и осью, снабжен дополнительным кулачком, установленным на одной оси с основным ку20лачком, установленным на одной оси с основным кулачком и дополнительным приводом, связанным с обоими кулачками, при зтом наклонные направляющие выполнены с,пилообразйым симметричным профилем, а нижние наклонные поверхности кулачков направлены в противоположные- стороны.
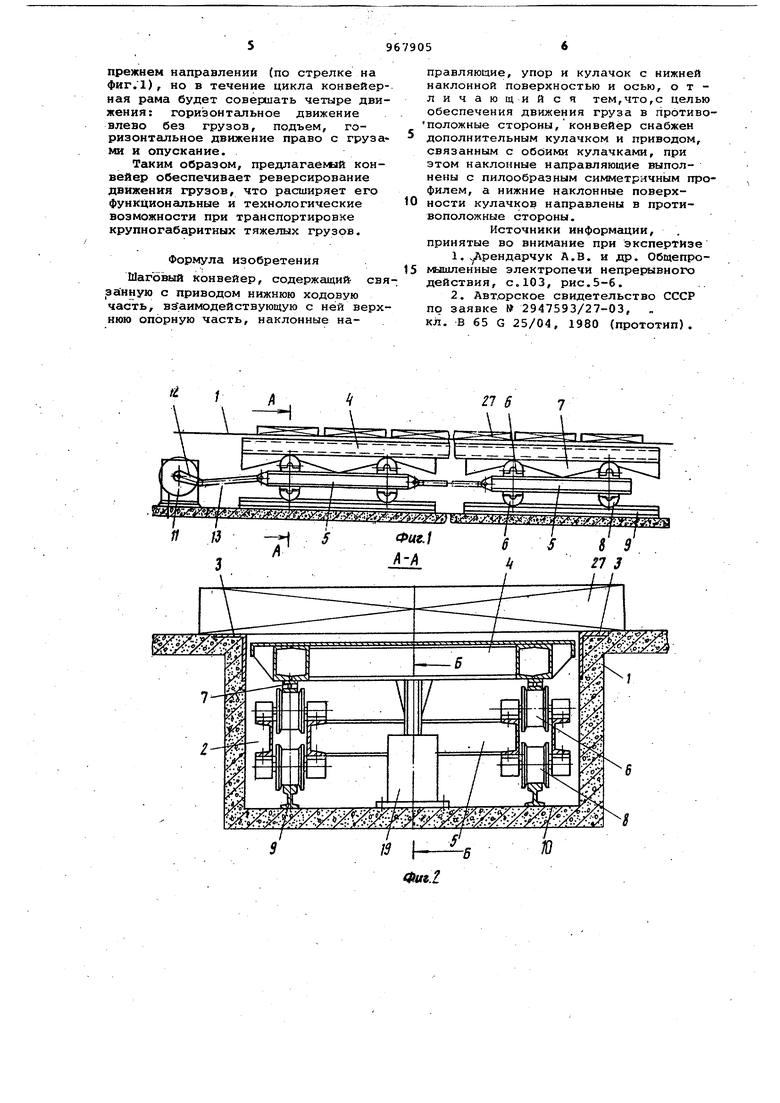
На фиг.1 показан шаговый конвейер, общий вид; на фиг.2 - разрез 30 А-А ца фиг.1; на фиг.З - разрез Б-Б на фиг.2; на фиг.4 - разрез 8-В на фиг.З. Конвейер содержит неподвижные опоры 1, образующие продолговатый лоток 2 в фундаменте. Опоры 1 имеют две каплгшарные поверхности 3, рас положенные наверху вдоль .противоположных сторон лотка. Вдоль лотка расположена верхняя опорная часть конвейера в виде; рамл. Под опорной частью 4 вдоль лотка расположена ни няя ходовая часть 5 в виде тележек На каждой тележке закреплены подъе ные ролики б, взаимодействующие с наклонными направляющими 7, прикрепленными снизу к конвейерной ра ме 4. Направляющие 7 выполнены с п лообразным симметричным . /Тележки 5 располагаются на дне 10 лотка 2, опираются своими катками на горизонтальные направляющие 9, проложенные на дне лотка. Для осуществления подъема-опускания и гори зонтального перемещения конвейерной рамы 4 при горизонтальном перемещении тележек в обеих направлениях конвейер имеет привод 11 с кривошип но-шатунным механизмом. Упомянутый механизм состоит из кривошипа 12, посаженного на валу привода, и шатуна 13, шарнирно связанного с кр вошипом 12 и с одной из тележек 5, Для обеспечения реверсирования движения штучных грузов з обоих на.правлениях и для удержания конвейер ной рамы при ее подъеме или опускании конвейер имеет упор 14 в виде ролика, закрепленного на раме 4 верхней опорной части, и переводными основным и дополнительным кулачками 15 и 16, изготовленными на общем вьщвижном штоке 17, установленном в направляющей 18 на стационарном упоре 19 с. возможностью вертикального перемещения. Нижняя поверхность 20 штока 17 опирается на плиту 21корпуса упора 19 и имеет возможность взаимодейстВИЯ с клином 22 дополнительного при вода 23 для перевода одного из кулачков 15 или 16 в рабочее положение, а клин 22 установлен в направляющих 24. Привод 23 выполнен в виде силового цилиндра, как показано на чертежах, но он. может быть сделан с винтовым механизмом и маховичком для перевода кулачков вручную. Нижние поверхности 25 и 26 кулачков 15 и 16 соответственно выполнены под углами противоположного направления. При нахождении опорной части 4 внизу грузы 27 располагаются на неподвижных опорах 1 (фиг.1 и 2), Шаговый конвейер работает следую щим образом. В исходном положении грузы 27 располагаются на неподвижных опоpax i. Между опорной частью 4 и гру зами 27 предусмот| ен зазор, необходимый для свободного пропускания рамы при ее холостом ходе. Рама 4, . занимая крайнее положение (нижнее), опирается впадинами наклонных направляющих 7 на подъемные ролики 6, В рабочем положении находится верхний кулачок 15 (фиг.З). При включении привода 11 конвейера кривошип 12 совершает круговое движение вокруг оси вала привода. Движение от него передается шатуну 13, который, перемещаясь в горизонтальном направлении с одновременным поворотом, тяне.т тележки 5 влево; Тележки на катках 8 перемещаются по горизонтальным направляющим 9 в ту же сторону. Конвейерная рама 4 поднимается, так как ее перемещению влево препятствует вертикальная поверхность кулачка 15, Вместе с рамой 4 поднимается упорный ролик 14 и переходит на горизонтальный участок кулачка (фиг.З). Рама 4 начинает двигаться в горизонтальной плоскости влево, где дальнейшему перемещению ее препятствует упор 19, с которым взаимодействует ролик 14. При этом шатун кривошипно-шатунного механизма привода 11 находится в крайнем левом положении и перемещается слева направо, и тянет тележки 5 вправо. Рама 4 опускается, ее перемещению в горизонтальной плоскости препятствует жесткий упор 19. Опускание рамы 4 прекращается, когда она займет крайнее нихшее положение, а подъемные ролики 6 находятся во впадинах между смежными направляющими 7. При даль-, нейшем перемещении шатуна 13 вправо, тележки 5 и рама 4 вместе перемещаются вправо. На своем пути упорный ролик 14 встретится с наклонной поверхностью 25 кулачка 15, поднимает шток 17 с кулачками 15 и 16 вверх и возвращается в исходное положение, совершая холостой ход. Таким образом, при нахождении кулачка 15 в рабочем положении за один цикл работы конвейера рама 4 совершает четыре движения: подъем, горизонтальное движение влево с грузами, опускание, и горизонтальное движение вправо без грузов. Грузы циклически перемещаются справа налево, но если появится необходимость в двихсении грузов в обратном направлении (реверсирование), то следует включить дополнительный привод 23, при этом клин 22 перемещается влево, а шток 17 с кулачками 15 и 16- поднимается. В рабочем положении будет находитьсякулачок 16 , Принцип работы конвейера при этом будет аналогичным описанному, причем вал привода 11 .будет вращаться в
прежнем направлении (по стрелке на фиг.1) , но в течение цикла конвейерная рама будет совершать четыре движения: горизонтальное движение влево без грузов, подъем, горизонтальное движение право с грузами и опускание.
Таким образом, предлагаекый конвейер обеспечивает реверсирование движения грузов, что расширяет его функционсшьные и технологические возможности при транспортировке крупногабаритных тяжелых грузов.
Формула изобретения Шаговый конвейер, содержащий свяэйнную с приводом нижнюю ходовую часть, взаимодействующую с ней верхнюю опорную часть, наклонные направляюаие, упор и кулачок с нижней наклонной поверхностью и осью, отличающийся тем,что,с целью обеспечения движения груза в противоположные стороны,конвейер снабжен дополнительным кулачком и приводом, связанным с обоими кулачками, при этом наклонные направляющие выполнены с пилообразным симметричным профилем, а нижние наклонные поверхности кулачков направлены в противоположные стороны.
Источники информации, принятые во внимание при экспертизе
1..Лрендарчук А.В. и др. Общепро5мышленные электропечи непрерывного действия, с.103, рис.5-6.
2.Авторское свидетельство СССР по заявке 2947593/27-03,
кл. в 65 G 25/04, 1980 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1980 |
|
SU912606A1 |
| Шагающий конвейер | 1978 |
|
SU804551A1 |
| Шаговый конвейер для перемещенияшТучНыХ КРупНОгАбАРиТНыХ гРузОВ | 1979 |
|
SU816886A1 |
| Устройство для загрузки тележечного конвейера | 1976 |
|
SU659479A1 |
| СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ПАРАМЕТРОВ НАКЛОННОГО КОНВЕЙЕРА С ПРИЖИМНОЙ ЛЕНТОЙ | 2008 |
|
RU2366597C1 |
| Шаговый конвейер | 1978 |
|
SU734092A1 |
| Шаговый конвейер | 1990 |
|
SU1794815A1 |
| Устройство для останова в заданной позиции перегрузочной каретки пакетоформирующей машины | 1990 |
|
SU1791303A1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ЛЕНТЫ КОНВЕЙЕРА | 1991 |
|
RU2041149C1 |
| Устройство для перемещения груза на транспортном средстве | 1989 |
|
SU1687537A1 |

Фиг.
