Предлагаемое устройство имеет целью дать возможность производить первоначальное обучение пеленгованию в классной обстановке.
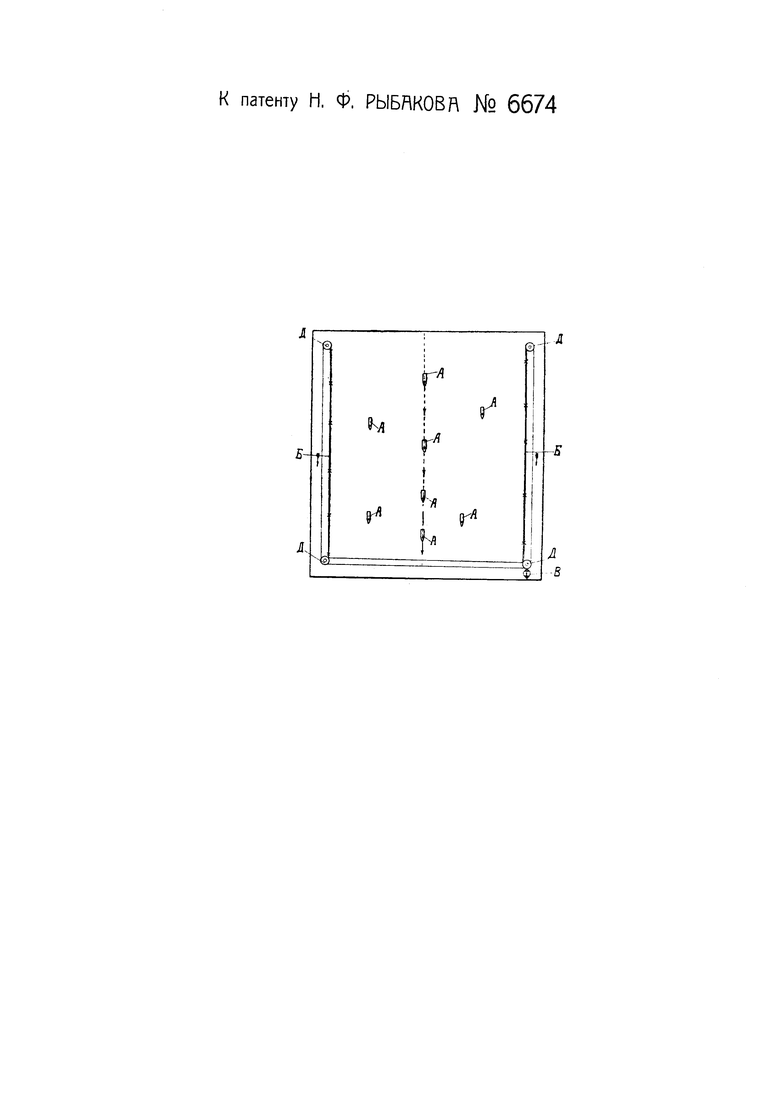
Для этой цели в классе устанавливается, как это схематически изображено на прилагаемом чертеже, ряд компасов А, линии 0-180 азимутальных кругов которых параллельны продольным стенам класса.
Вдоль двух или одной стены класса протягиваются на шкивах Д бесконечные шнуры и на них, на высоте пеленгаторов компасов, подвешиваются горизонтальные парусиновые бесконечные ленты Б, на которых нарисованы маяки или иные знаки.
Шкивы Д приводятся в медленное вращение ручной лебедкой или электродвигателем В, благодаря чему бесконечные полосы все время медленно передвигаются, как бы навстречу кораблю (компасу).
Таким образом воспроизводится явление, имеющее место, когда корабль идет в море на виду с берегов.
Для пользования устройством, лебедка или электродвигатель приводится во вращение и ленты начинают перемещаться. Обучающиеся у компасов берут пеленги, измеряют углы и прокладывают результаты своих наблюдений на карте соответствующего масштаба.
| название | год | авторы | номер документа |
|---|---|---|---|
| Учебное пособие для упражнения в решении навигационных задач в классной обстановке | 1935 |
|
SU45113A1 |
| ПРИБОР ДЛЯ АВТОМАТИЧЕСКОЙ ЗАПИСИ ПЕЛЕНГА В ГРАДУСАХ И ВРЕМЕНИ НА БУМАЖНОЙ ЛЕНТЕ | 1945 |
|
SU69949A1 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОГО ПЕЛЕНГОВАНИЯ РАДИОСИГНАЛОВ (ВАРИАНТЫ) | 2008 |
|
RU2393498C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2431156C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2444759C1 |
| СПОСОБ КАЛИБРОВКИ КОМПЬЮТЕРНО-ИНТЕРФЕРОМЕТРИЧЕСКИХ СИСТЕМ НА ПОДВИЖНЫХ ПЛАТФОРМАХ | 2005 |
|
RU2284043C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕЛЕНГА ИСТОЧНИКА ЗВУКА ПРИ РАЗМЕЩЕНИИ АКУСТИЧЕСКОЙ АНТЕННЫ АКУСТИЧЕСКОГО ЛОКАТОРА НА НАКЛОННЫХ ПЛОЩАДКАХ ПОВЕРХНОСТИ ЗЕМЛИ | 2014 |
|
RU2549919C1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ И НАДВОДНЫХ ОБЪЕКТОВ | 2017 |
|
RU2670176C1 |
Предлагаемое устройство имеет целью дать возможность производить первоначальное обучение пеленгованию в классной обстановке.
Для этой цели в классе устанавливается, как это схематически изображено на прилагаемом чертеже, ряд компасов А, линии 0-180 азимутальных кругов которых параллельны продольным стенам класса.
Вдоль двух или одной стены класса протягиваются на шкивах Д бесконечные шнуры и на них, на высоте пеленгаторов компасов, подвешиваются горизонтальные парусиновые бесконечные ленты Д на которых нарисованы маяки или иные знаки.
Шкивы Д приводятся в медленное вращение ручной лебедкой или электродвигателем В, благодаря чему бесконечные полосы все время медленно передвигаются, как бы навстречу кораблю (компасу).
Таким образом воспроизводится явление, имеющее место, когда корабль идет в море на виду с берегов.
Для пользования устройством, лебедка или электродвигатель приводится во вращение и ленты начинают перемещаться. Обучающиеся у компасов берут пеленги, измеряют углы и прокладывают результаты своих наблюдений на карте соответствующего масштаба.
