При пользовании наиболее распространенными типами пеленгаторов, предназначенных для кораблевождения, штурману, прежде чем приступить к прокладке курса по карте, приходится запомнить и записать отсчеты двух-трех пеленгов, взятых для обсервации. Запоминание нескольких трех-четырехзначных чисел весьма затруднительно и часто ведет к ошибкам, что вызывает необходимость повторного пеленгования.
Кроме того, при больших скоростях хода корабля для приведения пеленгов к одному моменту необходимо производить в момент пеленгования запись соответствующего отсчета лага.
Для исключения возможных ошибок и обеспечения контроля над правильностью кораблевождения весьма целесообразно производить указанные выше записи при помощи автоматического регистрирующего прибора.
Предметом изобретения является прибор для автоматической записи пеленга в градусах и времени на бумажной ленте при помощи типовых колес, дистанционно устанавливаемых в надлежащее положение, и электромагнитного механизма для приведения в действие печатающих молоточков.
Отличается прибор тем, что для приведения в действие типовых колес применен электрический диференциал, питаемый с одной стороны от датчика, связанного с визирной трубой оптического пеленгатора, а с другой - от датчика, связанного с компасом. Диференциал обеспечивает автоматическое сложение курса корабля и курсового угла пеленгуемого объекта.
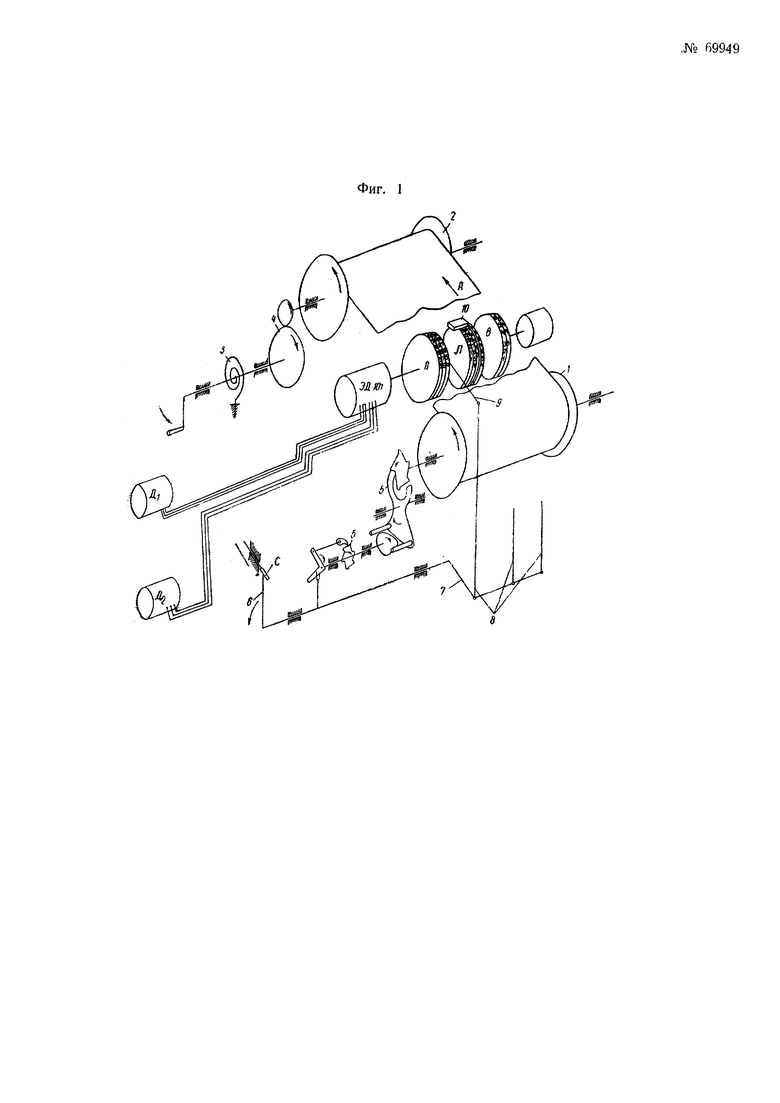
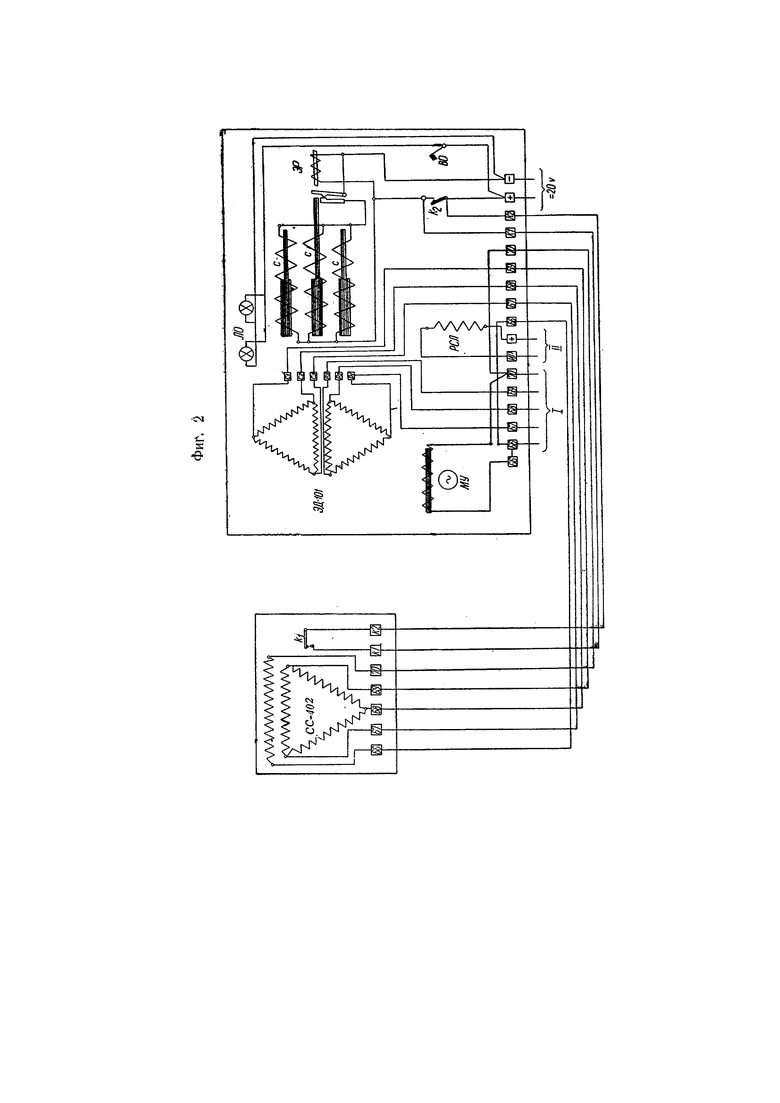
На фиг. 1 изображена кинематическая схема предлагаемого прибора, а на фиг. 2 - его принципиальная электрическая схема.
Поскольку пеленг на какой-либо объект представляет собой угол между направлением на истинный Север и направлением на пеленгуемый объект, то для получения пеленга достаточно иметь курс корабля и курсовой угол корабля при визировании цели, так как алгебраическая сумма этих величин и даст пеленг.
В предлагаемом приборе, схематично изображенном на фиг. 1, получение курса корабля предусмотрено от датчика Д1 гирокомпаса, а получение курсового угла корабля от датчика Д2 пеленгатора.
В качестве принимающего приспособления применен электродиференциал ЭД-101, который производит сложение курсового угла и курса, и полученный таким образом пеленг передает на счетчик П, например при помощи шестеренчатой передачи.
Счетный механизм прибора обычного барабанного типа с выпуклыми цифрами на барабанах состоит из счетчика пеленга П, счетчика времени В и счетчика лага Л.
Счетчик пеленга П, приводимый в действие электродиференциалом ЭД-101, имеет три барабана.
Первый барабан, связанный, например, шестеренчатой передачей с осью диференциала, совершает один оборот при изменении курса корабля или направления визирной трубы пеленгатора на 1°; его шкала разбита на десятые доли градуса. Второй барабан отсчитывает целые градусы и совершает 1 оборот за 10 оборотов первого барабана. 1 оборот третьего барабана соответствует повороту корабля или визирной трубы на 360°; его шкала разбита на 36 делений по 10° в каждом делении.
Счетчик лага Л имеет четыре барабана, приводимые во вращение при помощи электромагнитного привода, получающего импульсы тока от лага. Этот счетчик рассчитан на 100 замыканий на милю.
Счетчик времени В конструктивно выполнен подобно счетчику пеленга П, но имеет лишь два барабана, вращающиеся от синхронного электродвигателя типа СД. Первый барабан, связанный с осью электродвигателя, имеет шкалу, разделенную на 20 делений с ценой деления 0,5 мин. Шкала второго барабана имеет 6 делений с ценой деления 10 мин. Первый оборот второго барабана, соответствующий 6 оборотам первого, длится 1 час.
Над барабанами-шкалами помещена красящая лента (на чертеже не показана), подобная применяемой на пишущих машинках. Над лентой расположена бумага А, перематываемая с барабана 1 на барабан 2 при помощи пружины 3, приводящей в движение барабан 2 через передачу 4, и анкернохрапового спускового механизма 5, связанного с барабаном 1. Спусковой механизм приводится в действие скачкообразно сердечником С соленоида при замыкании цепи последнего. От сердечника С через рычажную передачу 6, 7, 8 и 9 приводятся в действие печатающие резиновые молоточки 10, от ударов которых на бумажной ленте производится запись показаний счетчиков. Эти отсчеты могут быть прочитаны через окошко, изготовленное из прозрачного материала в крышке прибора.
В качестве пеленгатора используется репитер гирокомпаса, на азимутальном круге которого устанавливается и жестко соединяется с осью картушки грубого отсчета визирная труба оптического пеленгатора. При наводке визирной трубы на пеленгуемую цель репитерный электродвигатель вращается и работает как датчик курсового угла, вызывая синхронное вращение подключенного к нему электродиференциала ЭД-101, работающего на счетчик пеленга. Точная наводка визирной трубы производится штурвальчиком, посаженным на картушки точного отсчета. Стекло с репитера удалено и заменено металлической крышкой. В центре крышки имеется сальник, через который одна внутри другой выводятся наружу оси визирной трубы и штурвала точной наводки. На азимутальном круге репитера делаются углубления для фиксации визирной трубы в диаметральной плоскости корабля. На пеленгаторе устанавливается кнопка, при нажатии которой регистрирующий прибор автоматически производит запись отсчетов.
На фиг. 2 изображена принципиальная электрическая схема прибора, на которой условно обозначено: СС-402 - датчик курсового угла (репитерный электродвигатель); K1 - кнопка на пеленгаторе; ЛО - лампочки освещения отсчетов; ЭР - электромагнитное реле размыкания; С - соленоиды; K2 - кнопка в регистрирующем приборе; ВО - выключатель освещения; РСЛ - реле датчика лага; МУ - синхронный электродвигатель типа СД; ЭД-101 - электрический диференциал, I - соединения от гирокомпаса и II - соединения от лага. Нумерация контактов соответствует принятой в схеме гирокомпаса.
Для питания соленоидов и электромагнитного реле размыкания на зажимы (+) и (-) подается постоянное напряжение 20 в от умформера лага.
От плюсового зажима ток протекает через кнопку K2 двумя путями: первый путь - от плюса через обмотку электромагнитного реле размыкания и на минус источника питания; второй путь - через параллельно соединенные обмотки трех соленоидов и разделительные контакты электромагнитного реле размыкания, причем при замкнутых контактах ток имеет выход на минус, а при размыкании контактов хвостовиком сердечника среднего соленоида цепь тока в соленоидах прервется до следующего нажатия кнопки.
Электродиференциал ЭД-101 питается с одной стороны от синхронного датчика курса гидрокомпаса переменным трехфазным током, подключенным к зажимам 67, 68, 69 и далее протекающим на обмотки диференциала через зажимы Р1, Р2 и Р3, а с другой стороны - от датчика курсового угла СС-402 пеленгатора через зажимы 67, 68 и 69 на зажимы обмоток С1, С2 и С3.
Питание на обмотку возбуждения датчика курсового угла СС-402 подается от контактов синхронного датчика гирокомпаса через зажимы в регистрирующем приборе 66 и 70. От этих же зажимов питается и обмотка синхронного электродвигателя - типа СД. Реле лага получает питание от лага через зажимы ИР и (+). Параллельно кнопке K2 через зажимы K1 и K2 подключена кнопка K1 на пеленгаторе. Действие кнопок K1 и K2 одинаково. На лампочки освещения отсчетов ЛО подается, напряжение 20 в через зажимы (+) и (-) и выключатель ВО.
Помимо своего основного назначения, предлагаемый прибор может быть использован также для записи курса корабля в любой момент хода и для записи радиопеленгов. При этом в первом случае визирная труба пеленгатора закрепляется в диаметральной плоскости корабля, а во втором - катушка гониометра соединяется с датчиком СС-402.
Прибор для автоматической записи пеленга в градусах и времени на бумажной ленте при помощи типовых колес, дистанционно устанавливаемых в надлежащее положение, и электромагнитного механизма для привода печатающих молоточков, отличающийся тем, что для привода типовых колес применен электрический диференциал, питаемый с одной стороны от датчика, связанного с визирной трубой оптического пеленгатора, а с другой - от датчика, связанного с компасом, и обеспечивающий автоматическое сложение курса корабля и курсового угла пеленгуемого объекта.
