(54) ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ НАВЕСНЫМИ ОРУДИЯМИ ТРАКТОРА
opyiuiH; на фиг. 4 - то же, при опускании орудия в рабочее положение; на фиг. 5 то же, при подъеме орудия в транспортное положение.
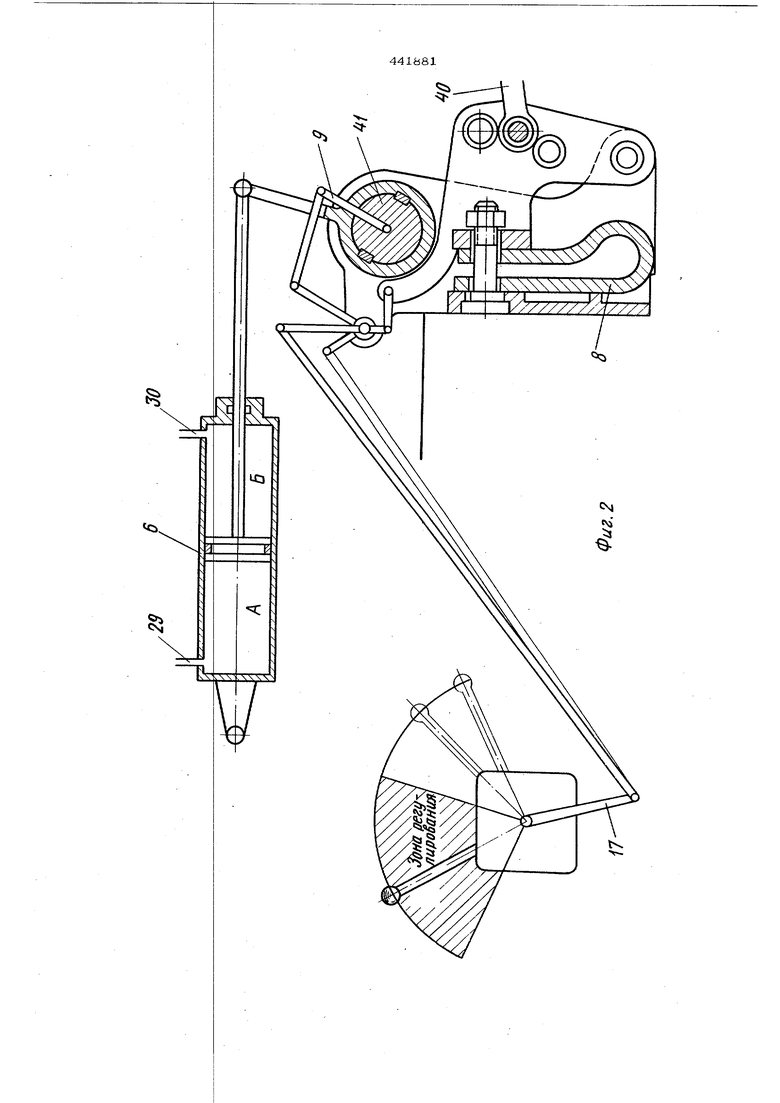
Гидравлическая система управления навесными орудиями трактора состоит из ре- зервуара 1, гидравлического насоса 2, распределителя 3, гидроувеличителя 4 сцепного веса с гидроаккумулятором 5, силового гидроцилиндра 6, дополнительных силовых 1-идро1шлиндров (на чертежах не показаны), регулятора 7 и датчиков 8 и 9 импульсов соответственно силового и позищюнного регулирования.
Регулятор и распределитель подключены к гидронасосу параллельно напорными магистралями 10 и 11. Регулятор представляет собой дополнительный распределитель в корпусе 12 которого перемещается гильза 13, управляемая через винтовую пару 14 рукояткой 15. Внутри гильзы перемещается золотник 16, его положение определяется величиной импульса, передаваемого датчиками 8 или 9 через систему рычагов и тяг 17 и винтовую пару 18. Внутри золотника установлена пружина. 19 П1оджимающая гильзу и золотник к торцам гаек соответствующих винтовых пар. В корпусе 12 находятся также обратный клапан 2О и запорный клапан 21 с толкателем 22.
В распределителе 3 расположены золотник 23 для управления гидроцилиндром, з(Х1Югники 24 и 25 для управления дополи1п-ель 1ыми гмдроцилиндрами, перепускной 2(J н предохранительный 27 клапаны. Ре- i-yjuri-op сообщен сливной магистралью 28 с резервуаром 1, магистралью 29 - с полосгью А опускания и магистралью 30 че- рез запорный клапан 21 - с полостью Б подъема гидрошшиндра, управляющими магистралями 31 и 32 - с золотником 23 и магистралью 33 - с каналом 34 управления перепускного клапана.
Распределитель 3, кроме соединения с регулятором и гидронасосом, сообщен сливной магистралью 35 с резервуаром 1, а Тсжже с дополшгтельными гидроцилиндрами магистралями 36 и 37 от золотника 24 и маслопроводами 38 и 39 от золотника 25.Регулятором 7 управляют при liOMUJiui рукоятки 15 в нейтральном положении золотников 23-25 (фиг. 1). В этом положении золотников распределителя рабочая жидкость от гидронасоса может по- CTyiiciTb или по магистрали 11 через от- крыгын перепускной клапан 26 в сливную Majin-траль 35 и далее в резервуар 1, luiii (если перепускной клапан закрыт), по
магистрали 1О в регулятор 7. Перепускной клапан открыт и соединяет напорную магистраль 11 со сливной магистралью 35 тогда, когда канал 34 управления сообщен со сливной магистралью 28 через регулятор, и перекрывает напорную магистраль 11 от сливной магистрали 35 тогда, когда канал 34 управления сообщения со сливной магистралью 28 не имеет. Магистрали 31, 32, 36, 37 и маслопроводы 38, 39 в нейтральном положении золотников 23-25 перекрыты рабочими поясками золотников от напорной магистрали 11.
При силовом и позиционном регулировании управляпот гидросистемой только при помощи рукоятки 15 регуляторш, контроль позиций золотрикрй. распределителя 3 не требуется. . ... ..;.:..
Для силовсмго регулирования золотник 16 регулятора через винтовую пару 18 и систему рычагов и тяг 17 связывается с датчиком 8 импульсов. Импульсом регулирования является деформация силоизмери- тельной Пружины датчика.;
Гидросистема при силовом регулировании работает следующим образом.
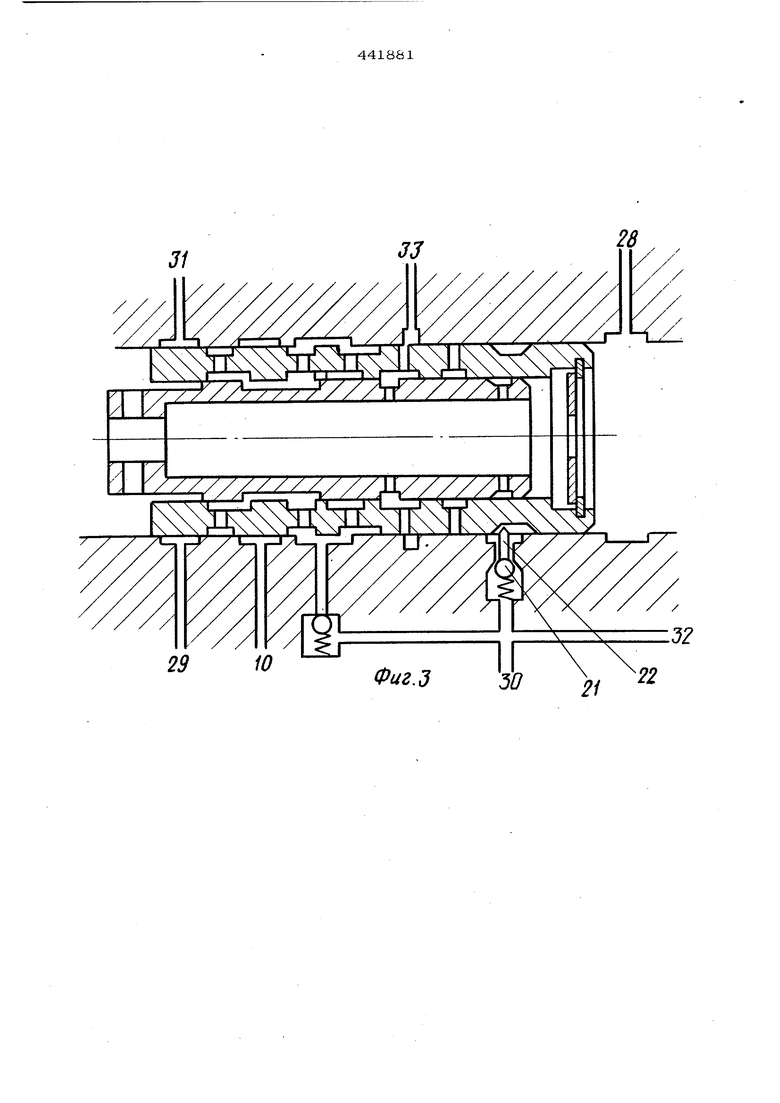
В транспортном положении орудия рукоятка 15 регулятора и связанная с ней гильза 13 устанавливаются в положение, показанное на фиг. 3. В этом положении .толкатель 22 запорного клапана 21 попадает в профильную канавку на наружной поверхности гильзы 13, давая возможность шарику запорного клапана 21 опуститься. При этом независимо от положения золотника 16 магистраль 30 перекрывается от сливной магистрали 28 щариком запорного клапана 21, а магистраль 32, соединенная с магистралью ЗО, перекрыта от сливной магистрали 35 поясками золотника 23, В результате рабочая жидкость в полости В гидрошшиндра 6 запирается, а орудие удерживается в транспортном положении. Канал 34 управления в этом положении через магистраль 33, проточки и отверстия в гильзе и золотнике регулятора сообщен со сливной магистралью 28, перепускной клапан 26 благодаря этому открыт, и . основной поток рабочей жидкости от гидронасоса 2 по магистрали 11 направляется в сливную магистраль 35, обеспечивая работу гидронасоса в режиме холостого перепуска.
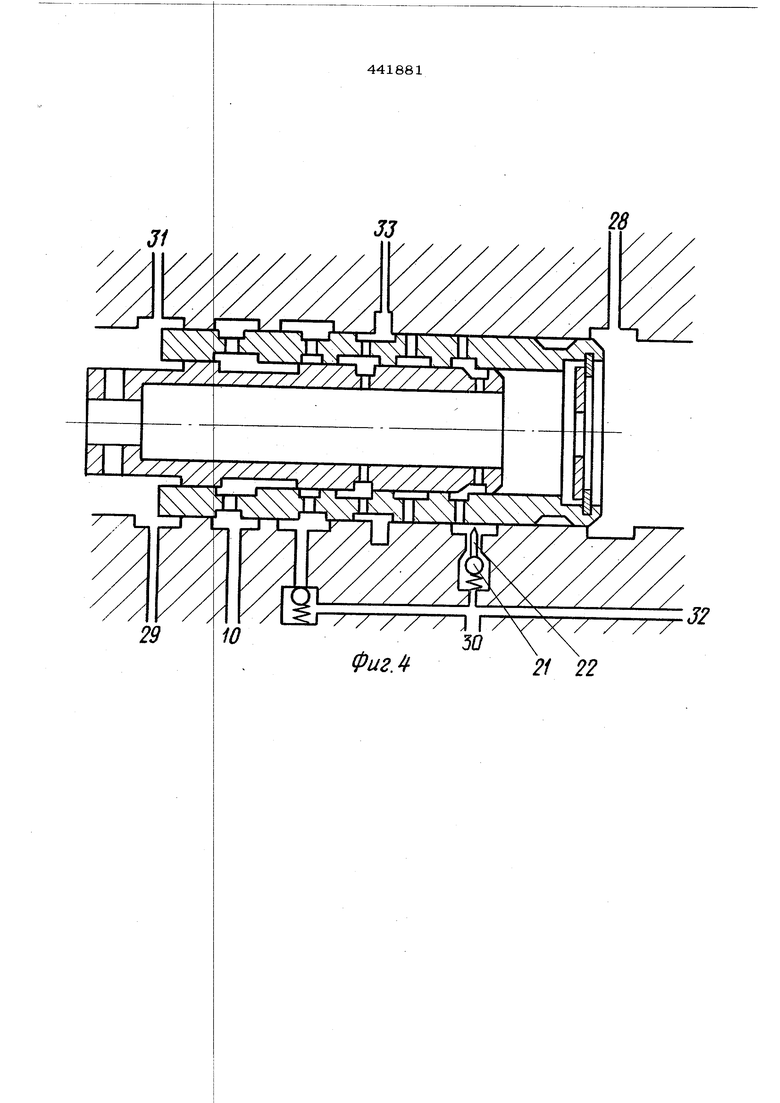
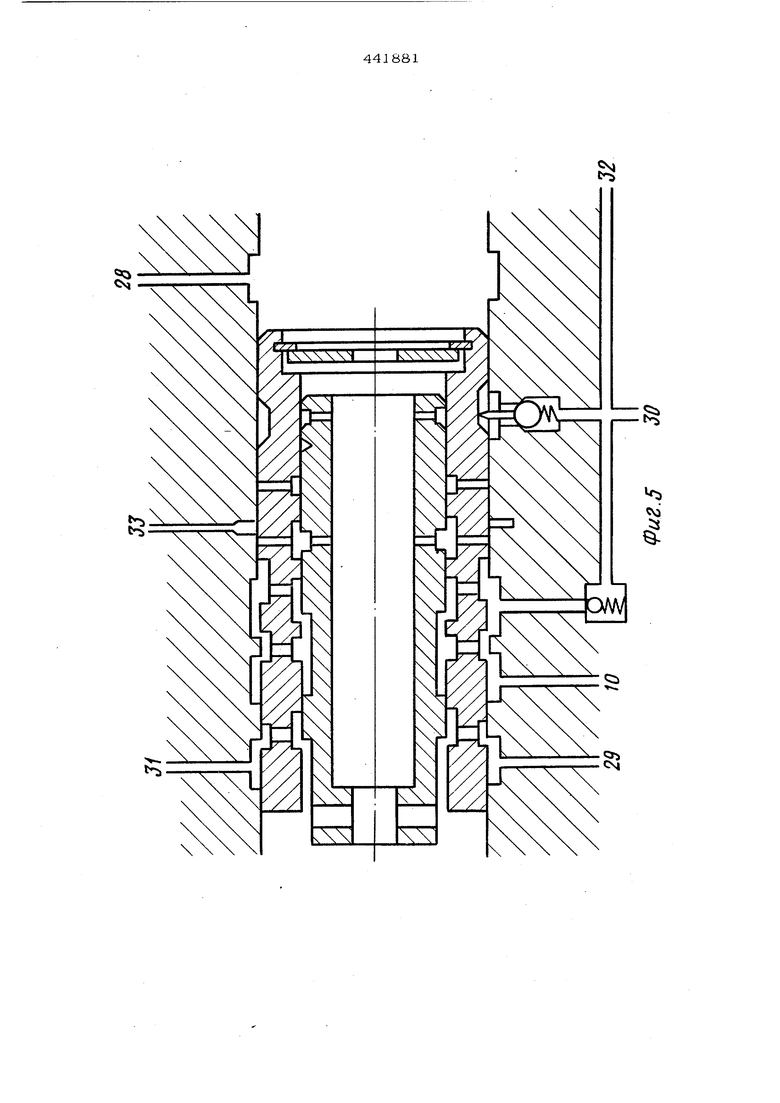
Для опускания орудия в рабочее положение рукоятка 15 регуляпюра и связанная с ней гильза I 3 yci-анавливаются в положение, пока.чанное на фиг. 4 (соответствующее заданной глубине хода рабочих органов орудия), и гильза 13 сдвигается вправо. При этом толкатель 22 выталкивается из профшшной канавки на наружную поверхность гильоы, приподнимая шарик запорного клапана 21. В результате полость Б гидроцилиндра 6 через магистраль ЗО, открытый запорный клапан 21, проточки и отверстия в гильзе и золотнике регулято за соединяется с полостью А гидроцилиндра и сливной магистралью 28, и орудие опускается под действием своего веса. При заглублении рабочих орханов оруди в почну тяговое сопротивление орудия воздействует на верхнюю тягу 40 навесного устройства, трактора, усилие от кото рой воспринимается силоизмерительной пружиной датчика 8. Деформация пружины передается на золотник 16 регулятора, золотник сдвигается вправо вслед за сместившейся ранее гильзой 13. Заглубление рабочих органов орудия в почву будет происходить до тех пор, пока магистраль ЗО не перекроется золотником 16 регуля тора от сливной магистрали 28 и рабочая жидкость в полости Б гидроцилиндра 6 опять не запрется, что соответствует потложению золотника, показанному на фиг. 1 По достижении золотником 16 регулятора ,это1о положения рабочие органы орудия пойдут на глубине, заданной положением рукоятки 15.. Регулирование глубины хода рабочих органов осуществляется рукояткой 15. Чем дальше будет повернута рукоятка 15 от транспортного положения, тем дальше гзправо сдвинется гшллза 13 и тем дальше вправо сдвинется золотник 16, перекрывая полость Б гидроцилиндра 6 от сливной магистрали 28. Так как перемещение золотника 16 определяется деформ цией силоизмерительной пружины датчика 8, перекрытие полости Б гидрошшиндра 6 произойдет, когда деформация пружины будет достаточно большая, что может наступить лишь на большой тлубине. И наоборот, чем ближе будет расположена рукоятка 15 к транспортному положению, тем меньшая деформащш пружины требует ся для перекрытия золотником 16 полости Б от сливной магистрали 28 и соответственно тем меньше будет глубина хода рабочих орг-анов орудия. рукояткой регулятора глубина ма рабочих ч Ганов орудия поддерживается юматичоскн. глубина хода увеличитс или уменьшится и будет от/шчаться от за данной, то изменение деформации силоизм рительной пружины вызовет перемещение золотника в соотве-гственно вправо или влево от положения, показанно1 о на . При перемещении золотника 16 вправо ма.гистраль 33, соед1шяюшая канал 34 управления со сливной магистршлью 28, пирекры-вается золотником 16, .вследствие перепускной клапан 26 закрывается, направляя рабочую жидкость от гидронасоса 2 по магистрали 1О, через проточки и отверстия в гильзе и золотнике, обратный клапан 2О и магистраль ЗО в полость Б гидроцилиндра 6. При перемещении же золотншса 16 влево полость Б гидроцилиндр)а через магистраль 30, открытый запорный клапан, проточки и отверстия в гильзе и.золотнике соединяется со сливной магистралью 28. И в том, и в другом случае поршень гидроцилиндра 6 перемещается и вызывает движение орудия по высоте, направленное на исправление отклонения фактической глубины хода от заданной. В процессе силового регулирования полость А гидроцилиндра 6 через магистраль 29 и отверстия в золотнике 16 постоянно сообщена со сливной магистралью 28 во всех положениях рукоятки, кроме положения, показанного на фиг. 3. В результате этого гидроцшпкщр О работает как гидроцилиидр одностороннег-о действия, что и требуется для силового регулирования. Орудие поднимается в транспортное положение, если рукоятку 15 и гильзу 13 установить так, как показано на фиг. 5. В этом положении магистраль 33 перекрыта гильзой от сливной магистрали 28, перепусююй клапан 26 закрыт, и поток рабочей жидкости но магистрали Ю поступает в регулятор и далее через обратный клапан 2О мимо запорного клапана 21 в магистраль 30 и затем в полость Б подъема гидроцилиндра, а полость А опускания через магистраль 29 и отверстия в золотнике 16 сообщается со сливной магистралью 28. В результате поршень гидроцидипдра 6 переместится влево до ynopva, а орудие поднимется в транспортное положение. После подъема рукоятка 15 опять устанинливается в положение, соответствую1лее положению гильзы на фиг. 3, в котором гидронасос переключается на работу в лилостом режиме, а полость Б подъема гидрошшиндра отсоединена запорным клапаном 21. Для позиционного регулирования золсиник 16 регулятора через винтовую пару 18 и систему рычагов и тяг 17 связывается с датчиком 9 импульсов. IlNtпульсом регулирования является поворот сштового вала 41. При позиционном регулировании угол поворота силового вала, а значит и позиция навесного орудия относительно трактора на высоте, однозначно . опреде ляется положением золотника 16, и наобо рот. В свою очередь, каждому положению золотника 16 соответствует лишь одно положение гильзы 13 и рукоятки 15, при котором положение поршня гидроцилиндра 6, а значит и позиция орудия относительно трактора фиксированы (фиг. 1). Таким образом, каждому положению рукоятки 15 будет соот ветстврвать лишь одно положение орудия по высоте, а значит и определенная глубина хода рабочих органов орудия. При управлении гидросистемой рукоятка 15 занимает положение с такой же по следовательностью, как и при силовом регулировании. J При высотном рег|улироБании рукоятка 15 и гильза 13 устанавливаются и фиксируются в положения, показанном на фиг. 3. В этом полоз ении соединенные общей проточкой в кс )рпусе 12 регулятора магистрали 29, 31, а также магистраль 10 перекрываются ш ружной поверхностью гильзы 13, магистраль 30, а значит и магистраль 32 перекрываются запорным клапаном 21. Магистраль 33 через проточки и отверстия в гильзе и золотнике сообщается со сливнс1Й магистралью 28. Таким образом, управляющие магистра ли 31 и 32 от золотника 23 распределителя 3, соединенные напрямую соответственно с полостью А опускания и полостью Б подъема гидрошшиндра 6, не будут сообщены с . каналами распределения регулятора, а канал 34 управления соединяется со сливной магистралью 28. В результате регулятор 7 исключается из работы, и управление гидросистемой производится только рукоятками {на чертежах не показаны) распределителя 3, связанными с золотниками 23-25 и рукояткой гидроувеличителя 4 сцепного веса, если требуется его включение. Предмет изобретения Гидравлическая система управления навесными орудиями трактора, содержащая золотниковый распределитель и регулятор с концентрично расположенными золотником и гильзой, сообщенные напорной магистралью сгидронасосом и управляющими магистралями между собой и полостями гидроцилиндра, отличающаяся тем, что, с целью надежного удержания сельскохозяйственного лрудия в транспортном положении, управляющая магистраль одного из золотников распределителя и регулятор параллельно подключены к полости подъема гидроцилиндра, причем регулятор сообщен с последним через запорный клапан, кинематически связанный с гильзой регуля- тора.
CM
«Ч)
Фиг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлическая система управления навесными сельскохозяйственными орудиями | 1975 |
|
SU668636A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ НАВЕСНЫМИ ОРУДИЯМИ СЕЛЬСКОХОЗЯЙСТВЕННОГО ТРАКТОРА | 1970 |
|
SU280074A1 |
| Гидравлическая система управления навесными сельскохозяйственными орудиями | 1973 |
|
SU441880A1 |
| Гидравлическая система управления сельскохозяйственными орудиями | 1988 |
|
SU1538909A2 |
| Гидравлическая система управления сельскохозяйственными орудиями | 1986 |
|
SU1429959A1 |
| Гидровлическая система трактора с гидропневматической подвеской задних колес | 1973 |
|
SU511887A1 |
| Позиционно-силовой регулятор гидравлической навесной системы итрактора | 1974 |
|
SU523655A1 |
| Гидросистема управления сельскохозяйственными орудиями | 1988 |
|
SU1618301A1 |
| Регулятор гидросистемы управления положением рабочего органа сельскохозяйственной машины | 1989 |
|
SU1701135A1 |
| Гидравлическая система управления навесными сельскохозяйственными орудиями | 1983 |
|
SU1165249A2 |