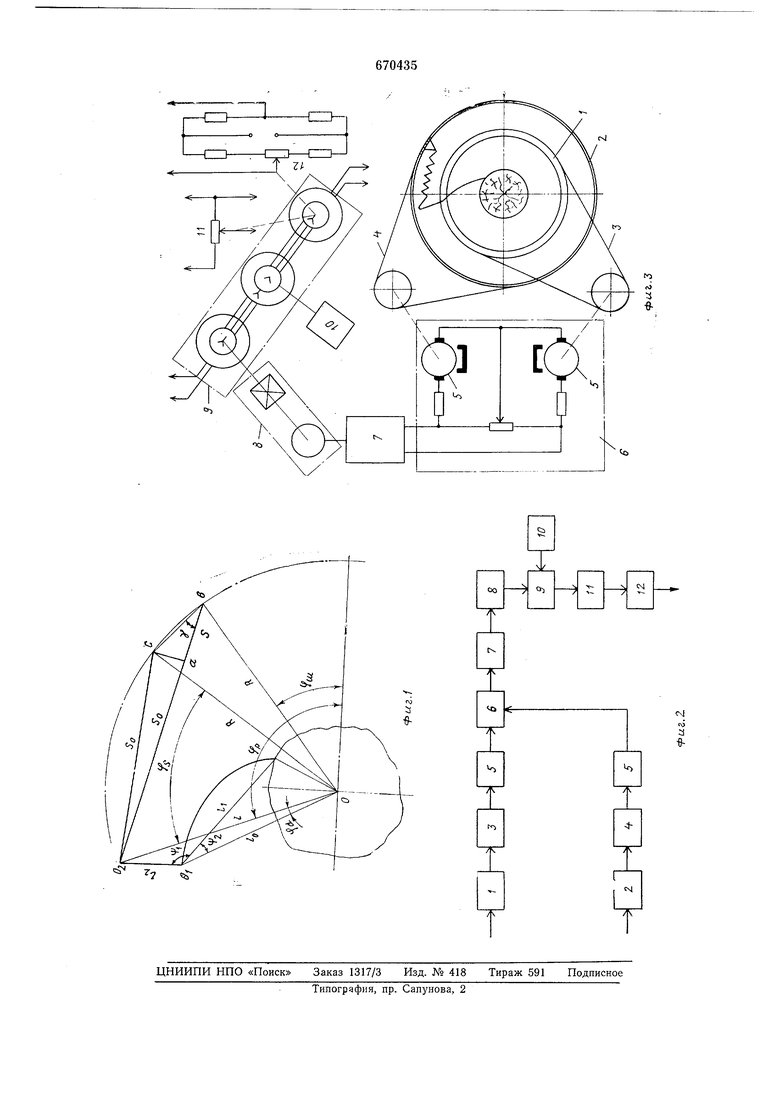
Сигналы, пропорциональные скоростям вращения ротора 1 станка и натяжного шкива 2, с выходов тахогеператоров 5 поступают на сравнивающее устройство (тахометрическую схему) 6, где происходит 5 выделение сигнала Uc(t), пропорционального разности скоростей вращения ротора 1 и натяжного шкива 2; fy,()./r,./C.r-Aco,(1) где Дсо - разность скоростей вращения ротора и натяжного шкива; Кс - коэффициент передачи сравнивающего устройства; Ктг - коэффициент передачи датчиков is угловой скорости. С выхода сравнивающего устройства (тахометрической схемы) 6 сигнал поступает на усилитель 7, с помощью которого осуществляется усилие сигнала и реализуется со- 20 отношение Uy(f) , где t/y(0-сигнал с выхода усилителя; /Су - коэффициент передачи усили- 25 С выхода усилителя 7 сигнал подается на интегрирующее устройство 8, в котором производится интегрирование его по времени:30р /с„./Су-/с :-/с„|А йг А:„лГуЛГс/Стг(р -Тш), где р - сигнал с выхода интегрирующего устройства; /Си - коэффициент передачи интегрирующего устройства; фр - угол поворота ротора станка за 40 время t (см. фиг. 1); фш - угол поворота натяжного шкива за время t. В свою очередь Тр - Тш Т + Pd + fs(4) 45 где ф - угол поворота ротора относительно натяжного шкива, определяющий растяжение упругого элемента S; фй - угол поворота ротора относитель- 50 но натяжного шкива, обусловленный отклонением диаметра бревна от максимально допускаемого станка; ф8 - угол поворота ротора относитель- gg но натяжного шкива, обусловленный начальной длиной упругого элемента. Для осуществления компенсации составляющей KiiK KcKir((fd + d) С выхода ИН- gQ тегрирующего устройства 8 сигнал подается на вход компенсационного устройства 9. На другой вход компенсационного устройства 9 подается сигнал KaK-yKcKtrffd с датчика 10 отклонения диаметра бревна от 65 максимального значения, допускаемого станком. Непосредственно в компенсационное устройство вводится величина KiiKyKcKffffs, которая вычитается из сигнала выхода интегрирующего устройства 8. Из этого же сигнала вычитается величина Ki KyKcKirffd с учетом ее знака. Таким образом, на выходе компенсационного устройства получают сигнал, пропорциональный углу растяжения упругого элемента устройства прижима короснимателей станка. Величина усилия F, создаваемого растяжением упругого элемента 5 (фиг. 1) F K,-S S 2R cos т sin If/2, где - коэффициент жесткости упругого элемента; а - угол наклона механической характеристики упругого элемента;R-радиус окружности точек крепления упругих элементов на натяжном шкиве; -у - угол, характеризующий величину растяжения упругого элемента. Поскольку ((f) и пределы изменения и ф известны и ограничены, то функциональная зависимость F /Сэ2/ cos 7 sin ср/2 реализуется с помощью функционального преобразователя. С выхода компенсационного устройства 9 сигнал поступает на вход функционального преобразователя (профильного потенциометра) 11. Нри этом выходной сигнал профильного потенциометра 11 пропорционален усилию прижима короснимателей станка: (О cos т sin 9/2 . Д-ф / (О, (8) где /Сф - коэффициент передачи функционального преобразователя. Для получения сигнала по отклонению усилия прижима короснимателя от заданного значения профильный потенциометр 11 включает измерительную схему 12 системы автоматического управления рабочими органами станка, в которой производится сравнение сигнала (8) с заданным значением и выделение сигнала, пропорционального отклонению усилия прижима от заданного значения: ис(0 -- ис/СфД(0,(9) где Кис - коэффициент передачи измерительной схемы; F(t) -отклонение усилия прижима от заданного значения. Таким образом, при необходимости получения сигнала по усилию прижима короснимателей станка, его снимают с выхода профильного потенциометра 11, при необходимости получения сигнала но отклонению усилия прижима короснимателей станка от заданного значения сигнал снимают с выхода измерительной схемы 12.
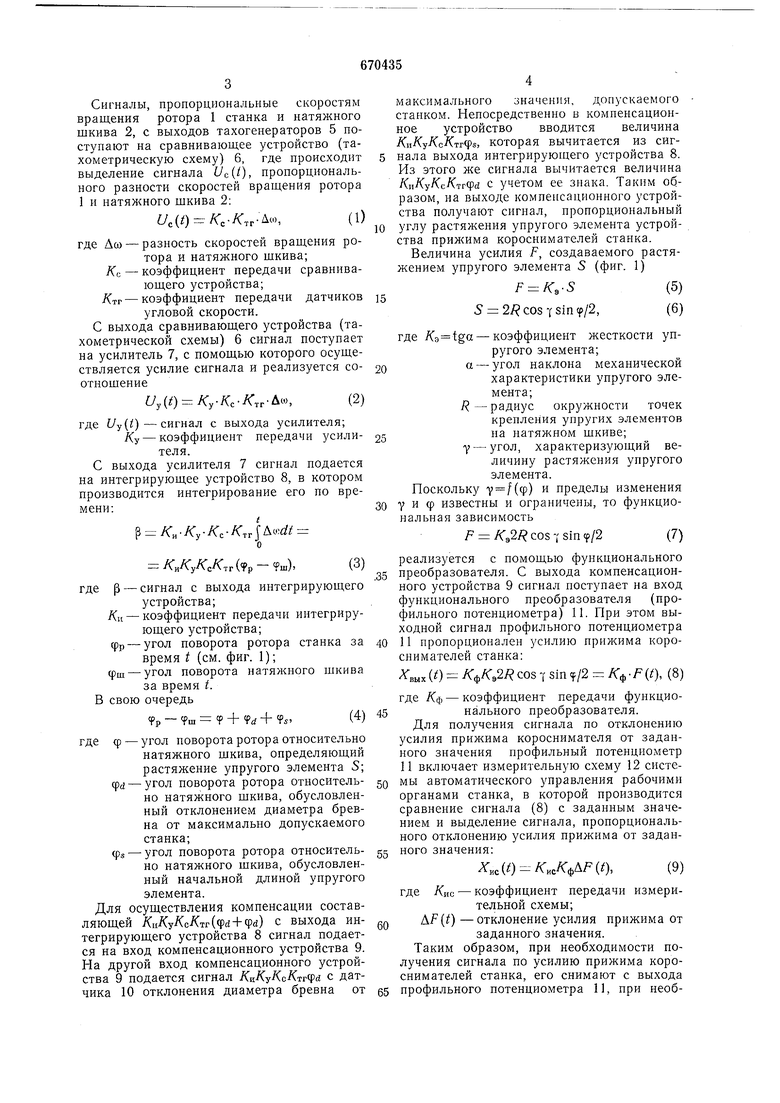
Выделение сигнала (формула 1) обеспечивается встречным включением тахогенераторов 5. Сигнал снимается с выходной диагонали моста. Поскольку напряжения тахогенераторов 5 пропорциональны скоростям вращения ротора 1 и натяжного шкива 2, то полярность и фаза выходного сигнала схемы б определяются соотношением скоростей вращения ротора 1 и натял ного щкива 2.
Сигнал с выхода схемы 6 поступает па вход усилителя 7, в котором происходит усиление его по напряжению и по мощности. К выходу усилителя 7 подключается обмотка управления реверсивного электродвигателя с редуктором, выполняющего функцию интегрирующего устройства 8. При выходной координате - напряжении (формула 2), снимаемом с выхода усилителя 7, выходной координатной интегрирующего устройства 8 будет угол поворота выходного вала редуктора, определяемый выражением (формула 3). Вьтходиой вал редуктора интегрируюн1,его устройства 8 жестко связан с ротором сельсина-дагчика компенсационного устройства 9, представленного системой синхронной передачи, состоящей из сельсина-датчика, дифференциального сельсина и сельсина-приемника. Ротор сельсина-датчика электрически связан со статором сельсина-дифференциала. Ротор сельсина-дифференциала электрически связан с ротором сельсина-приемника и жестко механической связью - с валом выходного устройства датчика 10 отклонения диаметра окоряемого бревна от максимального значения, допускаемого роторным окорочным станком. Для исключения ногрещности, обусловленной начальной длиной упругого элемента So, ротор сельсинадифференциала поворачивают на угол ТСи/Су/СсХтгфв относительно нулевого положения до соединения механической связью с датчиком 10. В соответствии с принципом работы системы синхронной передачи с дифференциальным сельсином угол поворота ротора сельсина-нрнемника б определяется алгебраической суммой углов поворота ротора сельсина-датчика (формула 3) и ротора сельсина-дифференциала. В нашем случае, на выходе системы синхронной передачи получается сигнал в виде угла поворота ротора сельсина-приемника, определяемый выражением б ф/2.
Вал сельсина-приемника жестко связан с движком профильного потенциометра 11, реализующего зависимость Лп2/ соз7з пф/2.
Входной величиной профильного потенциометра 11 служит угол поворота движка, выходной - напряжение, снимаемое с потенциометра (формула 8) пронорциональное усилию прижима короснимателей
станка.
Для получения сигнала, пропорционального отклонению усилия прижима короснимателей от заданного значения, профильный потенциометр 11 включается в плечо
мостовой измерительной схемы 12 системы автоматического управления. На фиг. 3 связь движка профильного потенциометра измерительной схемы 12 с ротором сельсина-приемника компенсационного устройства
9 ноказана штрих-нунктиром. Сигнал с выхода нзмернтельной схемы 12 определяется выражением (формула 9).
Формула изобретен и я
Способ определения усилия короснимателей роторного стволообрабатывающего станка с имеющим упругий элемент натяжным щкивом, включающий измерение скорости вращения ротора станка, отличающийся тем, что, с целью повыщеиия точности способа, одновременно с измерением скорости вращения ротора станка измеряют скорость вращения натяжного шкива, сравнивают скорости враИ1ения ротора и натяжного шкнва, а разность скоростей интегрируют по времени н компенсируют иогрешности, обусловленные наличием упругого элемента натяжного
щкива.
Источники информации, принятые во внимание при экспертизе
1.Сиротин А. А. Автоматическое управление электроприводами. М., «Энергия,
1969, с. 339-340.
2.Авторское свидетельство СССР jYo 335096, кл. В 27L 1/00, 1970.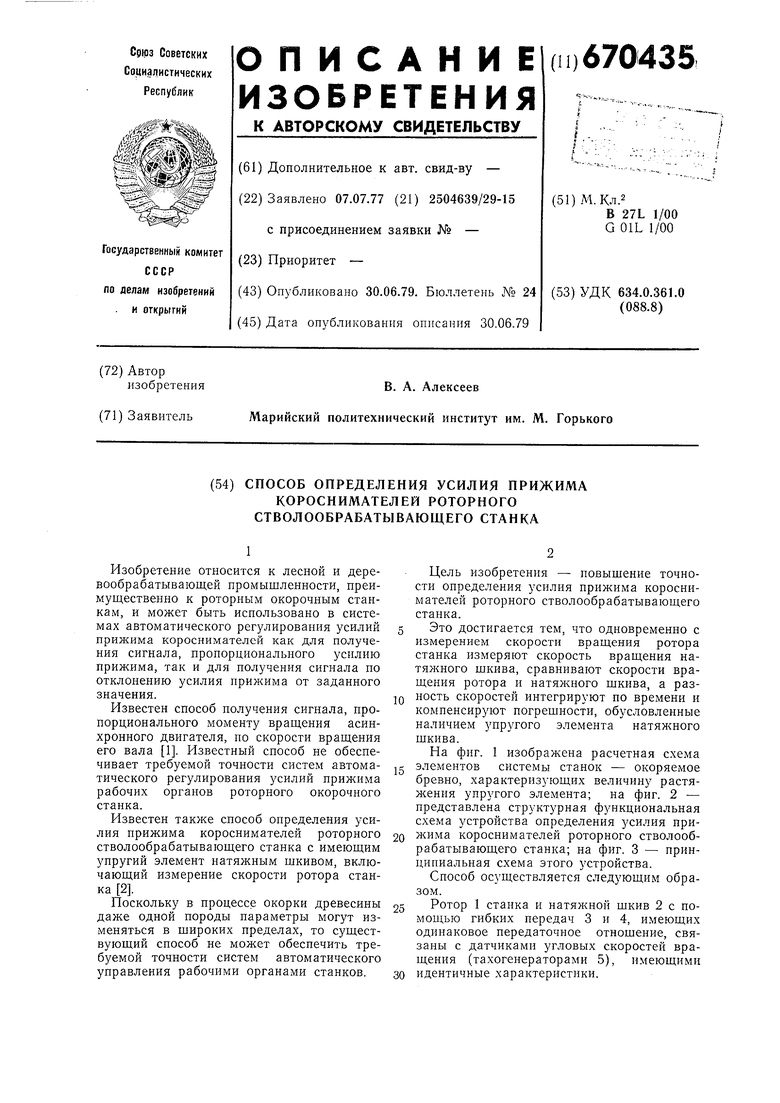
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для окорки бревен | 1983 |
|
SU1084131A1 |
| ОКОРОЧНЫЙ СТАНОК РОТОРНОГО ТИПА | 1973 |
|
SU368032A1 |
| Ротор окорочного станка | 1982 |
|
SU1108011A1 |
| Ротор окорочного станка | 1982 |
|
SU1074720A1 |
| Окорочный станок роторного типа | 1976 |
|
SU573345A2 |
| УСТРОЙСТВО для РЕГУЛИРОВАНИЯ УСИЛИЯ ПРИЖИМА КОРОСНИМАТЕЛЕЙ В ОКОРОЧНОМ СТАНКЕ РОТОРНОГОТИПА | 1969 |
|
SU245336A1 |
| Устройство для регистрации траектории движения наземного транспортного средства | 1973 |
|
SU478186A1 |
| Устройство для автоматического управления механизмами машин-орудий | 1937 |
|
SU55814A1 |
| ТЕХНИЧЕСКАЯ - ^ | 1965 |
|
SU172029A1 |
| Устройство для прижима короснимателей окорочного станка роторного типа | 1976 |
|
SU595156A1 |