Радиус циркуляции корабля обычно определялся расчетом ро длине пути, измеренной лагом, за время поворота корабля на опрееленный угол, отсчитываемый репитером компаса.
Предлагаемое устройство имеет целью определение мгновенного радиуса циркуляции корабля автоматически, путем применения счетнорешающего механизма, который по вводимым в него импульсам от лага и компаса производит расчет, вызывающий отклонение стрелки по соответствующей шкале.
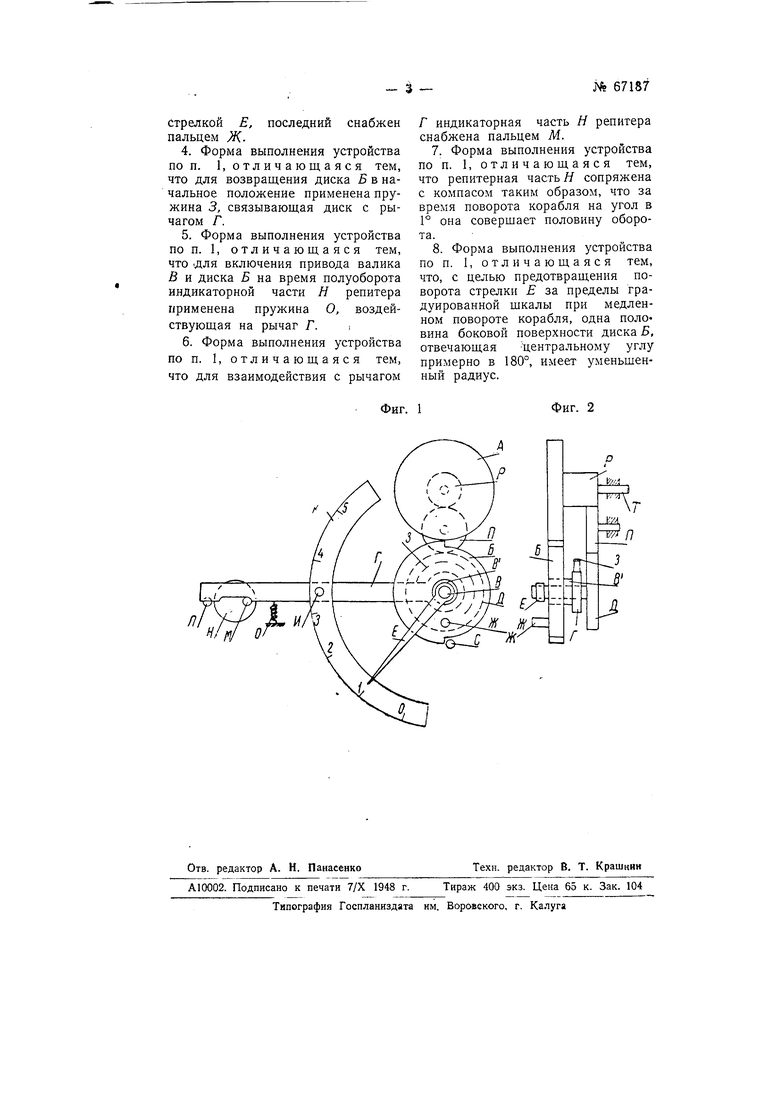
На чертеже фиг. 1 и 2 изображают кинематическую схему устройства для определения радиуса циркуляции корабля, представленную в двух проекциях
Устройство для определения радиуса циркуляции корабля решает
формулу:
S г 57,3 где г - радиус циркуляции,
5 - расстояние, проходимое кораблем за время его поворота на угол,
а - угол поворота корабля в градусах.
Диск А, насаженный на выходной вал /Г счетчика пройденного расстояния по лагу, приводится во вращение со скоростью, пропорциональной скорости движения корабля. Диск А фрикционно связан с диском -Б, свободно сидящем на валике В , закрепленном на одном конце двуплечего рычага Г, поворотно монтированного относительно оси И.
Валик В выполнен полым и через него проходит валик В, несущий на одном конце диск Д, фрикционно связанный через паразитный диск П с диском Р, жестко скрепленным с валом Т, а на другом конце - стрелку Е, удерживаемую на нем лишь трением. Другой конец рычага Г взаимодействует с пальцем М выходного вала Н репитера компаса и с неподвижным упором Л. Фрикционное замыкание дисков осуществляется пружиной О. Диск Б несет на себе палец Ж, взаимодействующий при повороте диска со стрелкой Е. На этом же диске закреплен один конец спиральной пружины 3, другой конец которой закреплен на сыч are Г.
На рычаге же закреплена шкала К,. градуированная в единицах измерения радиуса циркуляции.
Диск Л при своем вращении увлекает диск Б, который своим пальцем Ж ведет за собой стрелку Е, преодолевая трение, связывающее ее с валиком Д, получающим вращение в сторону, обратную вращению диска Б. Поворот диска Б будет происходить до тех пор, пока палец М вала Я репитера не повернет рычаг Г вокруг оси И и не отсоединит этот диск от диска А.
Полный поворот вала Н осуществляется за время поворота корабля на угол 1а (например, 2°). Тогда за время поворота корабля
«,;Гхза первые -„- палец М не будет
взаимодействовать с рычагом Г и пружина О будет прижимать диск Б к диску А; во время же поворота корабля за вторые -;у палец М
будет поворачивать рычаг Г и отключать диск Б от диска А. В последнем случае диск Б пружиной 3 будет возвращен в исходное положение, определяемое упором С. Стрелка Б, ввиду того что диск Д в это время отсоединен от диска (П, остановится, указав на шкале искомый радиус циркуляции.
В следующий момент - при повороте корабля на палец М
выйдет из-под рычага Г, который плавно прижмется пружиной О к упору Л и замкнет диски Б к А, а также диски Д и П. Диск Д будет вести стрелку к исходному положению до тех пор, пока она не встретит палец Ж вращающийся навстречу диску Б.
Палец Ж вновь увлечет за собой стрелку и будет вести ее до следующего поворота рычага ..Г.
Указанный цикл взаимодействия частей будет повторяться через каждые а в течение всего периода циркуляции корабля.
Таким образом за поворота
Zi
корабля в приборе происходит набор радиуса циркуляции, а за поа.
следующий - поворота - фиксация радиуса циркуляции на шкале К и подготовка к следующему циклу.
Как только циркуляция корабля окончена и он выходит на прямой курс, диск Б повернет стрелку Е до предела и она останется в этом положении, удерживаемая упором Ж.
Предмет изобретения
1. Устройство для определения радиусациркуляции корабля, заключающее в себе лаг для измерения пути, проходимого кораблем за время его ,поворота на определенный угол, измеряемый репитером компаса, отличающееся применением стрелки Е, насаженной фрикционной посадкой на валик В, приводимый во вращение выходным валом лага, и поворачиваемой на этом валике навстречу его вращению диском Б, свободно насаженным на валик В и приводимым во вращение от того же лага, каковой валик поворотно монтирован на конце двуплечего рычага Г, другой конец которого находится под воздействием индикаторной части Я репитера в течение полуоборота, соответствующего определенному углу поворота корабля, и обеспечивает выключение привода валика В и диска Б в течение второго полуоборота индикаторной части Я, во время которого диск Б автоматически прекращает воздействие на стрелку и возвращается в начальное положение.
2.Форма выполнения устройства по п. 1, отличающаяся тем, что привод диска Б от выходного вала Т лага осуществлен фрикционной связью этого диска с диском Л, насаженным на вал Г, а привод валика В - фрикционной связью насаженного на этот валик диска Л, паразитного диска П и ведущего диска Р, насаженного на вал Т.
3.Форма выполнения устройства л о п. , от ли ч а ЮЩ а яс я тем, что для взаимодействия диска1;5со
стрелкой Е, последний снабжен пальцем Ж.
4.Форма выполнения устройства по п. 1, отличающаяся тем, что для возвращения диска Б в начальное положение применена пружина 3, связывающая диск с рычагом Г.
5.Форма выполнения устройства по п. 1, отличающаяся тем, что для включения привода валика В и диска Б на время полуоборота индикаторной части Я репитера применена пружина О, воздействующая на рычаг Г. ,
6.Форма выполнения устройства по п. I, отличающаяся тем, что для взаимодействия с рычагом
TV 77
nl,f-f, И А
H/fj/ о
Г индикаторная часть Н репитера снабжена пальцем М.
7.Форма выполнения устройства по п. 1, отличающаяся тем, что репитерная часть Я сопряжена с компасом таким образом, что за время поворота корабля на угол в 1° она совершает половину оборота.
8.Форма выполнения устройства по п. 1, отличающаяся тем, что, с целью предотвращения поворота стрелки Е за пределы градуированной шкалы при медленном повороте корабля, одна половина боковой поверхности диска Б, отвечающая -центральному углу примерно в 180°, имеет уменьшенный радиус.
Фиг. 2
Фиг. 1
.J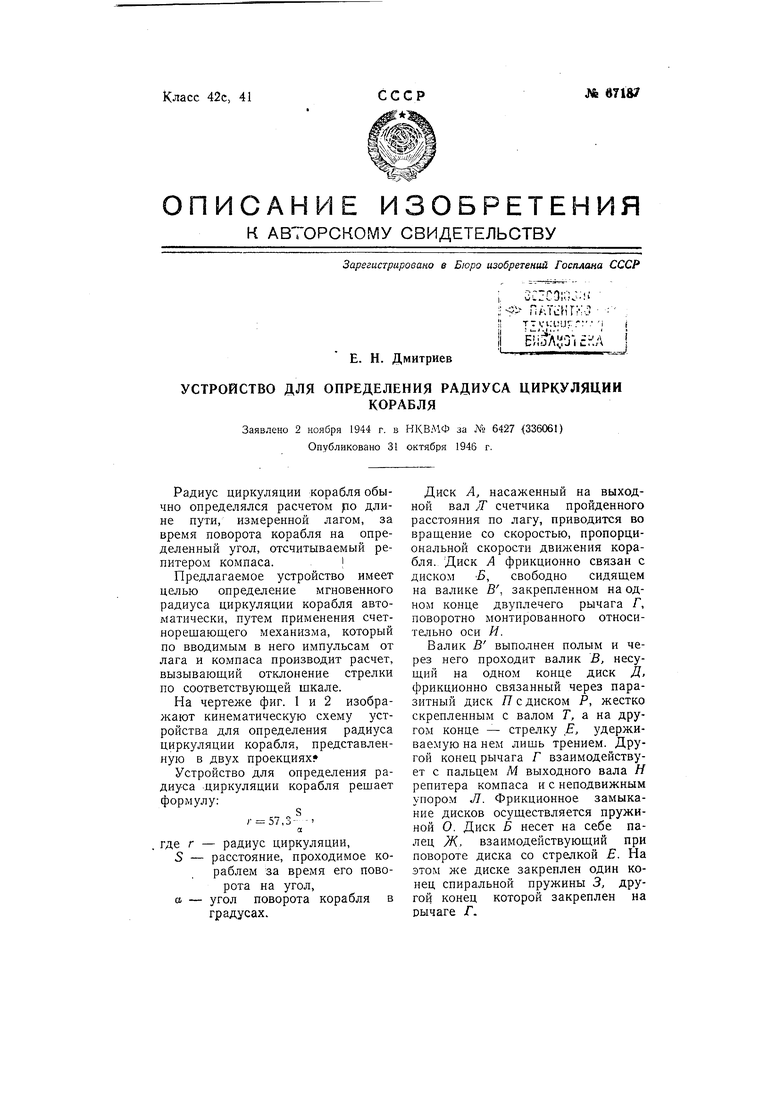
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИБОР ДЛЯ АВТОМАТИЧЕСКОЙ ЗАПИСИ ПЕЛЕНГА В ГРАДУСАХ И ВРЕМЕНИ НА БУМАЖНОЙ ЛЕНТЕ | 1945 |
|
SU69949A1 |
| УПРАВЛЯЕМЫЙ ЛАГ | 1925 |
|
SU12580A1 |
| Программное устройство | 1988 |
|
SU1733370A1 |
| Прибор для прокладывания на карте пройденного пути | 1932 |
|
SU49853A1 |
| Интегратор | 1938 |
|
SU56663A2 |
| Устройство для периодического изменения направления вращения электрического двигателя | 1930 |
|
SU39860A1 |
| Тренажер для рулевых вертикальщиков | 1939 |
|
SU60187A1 |
| УСТРОЙСТВО ДЛЯ НАКАТЫВАНИЯ ТКАНИ В РОЛИКИ | 1937 |
|
SU59400A1 |
| Секстант с искусственным горизонтом | 1946 |
|
SU67830A1 |
| Логарифмическая счетная машина | 1928 |
|
SU20375A1 |