Изобретение относится к автоматике и может быть использоэано в различных цифровых системах регулирования и управления, например для управ-, ления манипулятором.
Целью изобретения является повышение точности системы за счет устранения колебаний объекта около положения равновесия путем введения линей- полнен, например, в виде буферного
10
ного закона управления и расширение функциональных возможностей системы
Для устранения колебаний объекта около положения равновесия и, следовательно , для повышения точности работы устройства закон управления предлагается сделать не двухуровневым, как в прототипе, а с плавным линейным изменением уровня сигнала управления исполнительным блоком от максимума до нуля. При таком законе изменения управляющего сигнала в положении равновесия (N. ° л скорость объекта будет нулевой и, следовательно , не будет перерегулирования. Скорость объекта может быть нулевой в положении равновесия, так как управляющий сигнал, а следовательно , искорость объекта плавно уменьшаются при приближении к положению равновесия.
Коэффициент пропорциональности в линейной зависимости сигнала уп- равлени;я исполнительным блоком от сигнала ошибки N,-Nj выбирается в зависимости от степени инерционности объекта. Таким образом, можно управлят объектами с разной инерционностью, что расширяет функциональные возможности устройства. Величина коэффициента пропорциональности в линейной зависимости сигнала управления исполнительным блоком от сигнала ошибки , реализуется преобразователем 10 код - код.
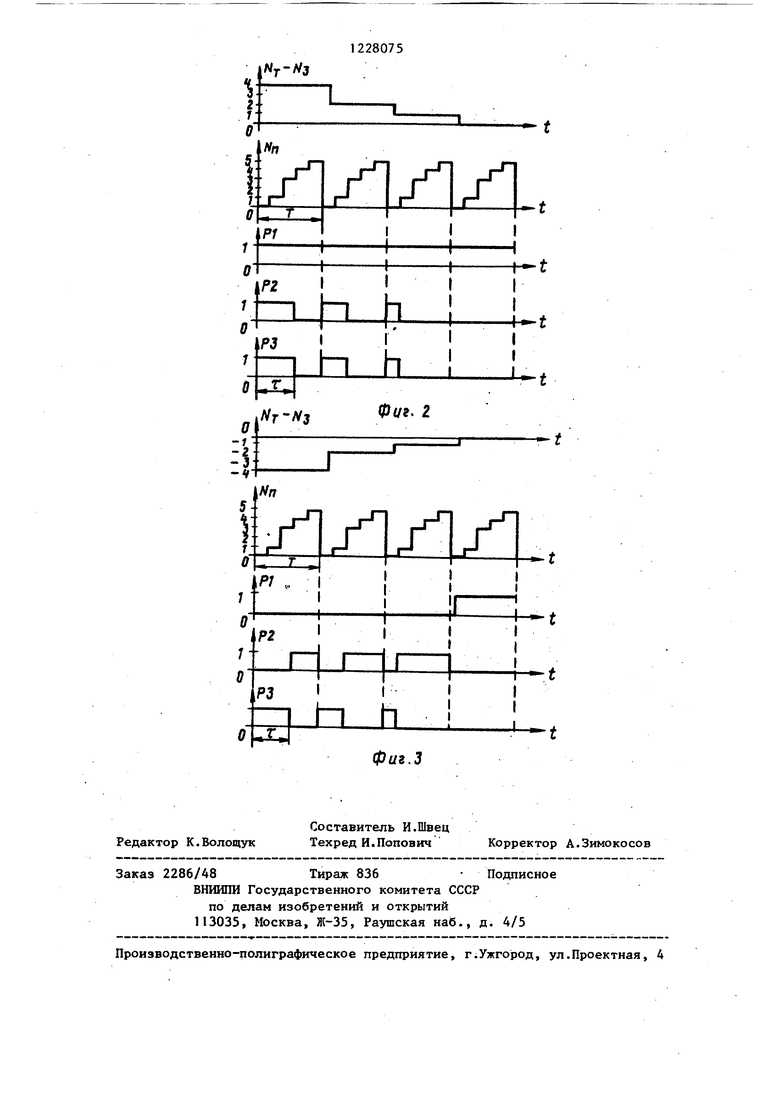
На фиг.1 представлена функциональная схема цифровой системы; на фиг.2 и 3 - эпюры, поясняющие работу устройства.
Цифровая система содержит задат- чик координат 1, первый преобразователь 2 код - код, первый сумматор 3 исполнительный блок А, кинематически связанный с объектом 5 и датчиком положения 6, второй преобразователь 7 код - код, генератор импульсов 8, счетчик импульсов 9, третий преобразователь 10 код - код, управв-,
а122807
ляемый инвертор 11 и второй сумматор J2.
На фиг.2 и 3 обозначено: N - код текущего положения объекта; N - задан- 5 ный код положения; Р - выход перенос первого сумматора; Р, - выход переноса второго сумматора,
Задатчик координат может быть выполнен, например, в виде буферного
регистра, выходы которого являются выходами задатчика координат, а его информационные входы через тумблеры подключаются к источнику напряжения, соответствующего значению 1 или О. Синхровход буферного регистра через кнопку подключается к источнику напряжения, соответствующего значению 1.
Запись набранного с помощью тумблеров двоичного кода в буферный регистр осуществляется нажатием кнопки. Записанное в, буферный регистр значение кода постоянно присутствует на выходе регистра и может быть считано в любое время. Буферный регистр может быть реализован, например, на микросхемах К155 ТМ8.
Управляем 1й инвертор 11 инвертирует (преобразует в обратный) и передает на выход в инверсном виде параллельный код, приходящий на его вход, при значении сигнала на его управляющем входе, равном 1, и передает без изменения на выход код, пивший на его вход, при значении сигнала на его управляющем входе., равном О. Управляемый инвертор 11 введен в устройство для вьшолнения операции вычитания на сумматоре 12 независимо от знака разности , вычисляемой на сумматоре 3. Управляемый инвертор И может быть реализован, например, на элементах ИСКЛЮЧАЮЩЕЕ ИЛИ (микросхема К155 Ж5). Выходы этих элементов образуют разряда выхода управляемого Инвертора 11. Один из входов каждого элемента ИСКЛЮЧАЩЕЕ ИЛИ является разрядом входа управляемого инвертора 11. Другие входы этих элементов объединены и образуют управляющий вход управляемого инвертора 11.
Сумматор выполняет операцию вычитания, если на один его вход подается прямой ход уменьшаемого числа, а на второй его вход подается дополнительный код вычитаемого числа или
Обратный код этого числа. В случае подачи обратного кода вычитаемого числа разность получается на единицу меньше младшего разряда. Подача нужных кодов на входы сумматора J 2 ббеспечивается тем, что при появлении на выходе сумматора 3 прямого кода, подаваемого на первый вход сумматора 12, на выходе переноса Р1 сумматора 3 появляется сигнал 1., который поступает на управляющий вход управляемого инвертора 11. При этом управляемый инвертор 1I в соответствии с логикой своей работь подает на второй вход сумматора 12 обратный «код. В случае появления на выходе сумматора 3 дополнительного кода, поступающего на первый вход сумматора 12, на выходе переноса Р1 сумма10
5
чением сигнала iPlj поступающего в исполнительный блок 4.
л
Код разности Si или S1 координа N и N с выхода сумматора 3 посту ет на вход первого числа сумматора 12. На вход второго числа сумматор 12 поступает прямой N или обратньШ код К„, формирующийся в результате последовательного прохождения сигн лов через ряд устройств, а именно: генератор импульсов 8 вырабатывает последвательность импульсов с частотой, f, которые поступают на вход двоичного сметчика 9, имеющего п р рядов. С выхода счетчика 9 периоди чески нарастающие с частотой Р„ /2 двоичные коды поступают на вход преобразователя 10 код - код, где изменяются в соответствии с пр
тора 3 появляется сигнал О, который20 , законом управления объектом.
25
30
35
поступает на управляющий вход управляемого инвертора 11. При этом управляемый инвертор 11 подает на второй вход сумматора 12 прямой код.
Система работает следующим обра- . зом.
Координаты объекта 5, задавае1 й)1е задатчиком I в некотором цифровом коде, преобразуются преобразователем 2 код - код в стандартный двоичный код И, инвертированное и дополненное значение которого N N + I поступает на входы второго числа сумматора 3. Координаты текущего положения объекта 5 воспринимаются датчиком 6 положения объекта 5 и вьздаваемые в некотором цифровом коде преобразуются преобразователем 7 40 код - код в стандартный двоичный код Щ, поступающий на входы первого числа сумматора 3. В результате выполнения операции сложения координаты заданного положения и дополнительно- 45 го кода координатой текущего положения (N + Nj, что соответствует вычитанию N - N), на выходах сумматора 3 устанавливается код разности координат в прямом коде Sj,ее- 50 ли зта разность не меньще нуля (), при этом на выходе переноса устанавливается сигнал , или В дополнительном коде S1, если эта разность меньше нуля (N ) РИ iS этом на выходе переноса устанавливается сигнал . Направление перемещения объекта 5 определяется знаС выхода преобразователя 10 коды N периодически изменяюпщеся по закон определяемому преобразователем 10, поступают на вход управляемого инв тора 11, на управляющий вход котор поступает сигнал переноса R1 с вы хода сумматора 3. В зависимости от уровня сигнала Р1 управляемый инв тор преобразует код N в прямой ко
Nn N
о
если , или в обратный код если , который поступает н первые входы сумматора 12. На вторые входы сумматора 12 поступает к S1 или S1. Таким образом, если раз ность координат текущего положения заданного меньше нуля, что соответ ствует низкому уровню сигнала Р1 (), то эта разность в дополнительном коде суммируется с периодически изменяющимся кодом Nn, которы проходит без изменений через управляемый инвертор на входы второго су матора 12. Если разность координат текущего положения и заданного не меньше нуля, что соответствует высо кому уровню сигнала Р1 (Р1 1), то эта разность в прямом коде суммируе ся с К(7-периодически изменякщимся и версным значением кода N,,, которое проходит на входы сумматора 12 с вы хода управляемого инвертора 1I.
На-сумматоре 12 производится опе рация сложения SI+N, если О ( Р1 1) или Sl+N, если . 0 ( ), что соответствует сложению N с разностью N и Nj , если эта разность меньше нуля, и вычитаниюП
чением сигнала iPlj поступающего в исполнительный блок 4.
л
Код разности Si или S1 координат N и N с выхода сумматора 3 поступает на вход первого числа сумматора 12. На вход второго числа сумматора 12 поступает прямой N или обратньШ код К„, формирующийся в результате последовательного прохождения сигналов через ряд устройств, а именно: генератор импульсов 8 вырабатывает последвательность импульсов с частотой, f, которые поступают на вход двоичного сметчика 9, имеющего п раз рядов. С выхода счетчика 9 периодически нарастающие с частотой Р„ /2 двоичные коды поступают на вход преобразователя 10 код - код, где изменяются в соответствии с при, законом управления объектом.
5
0
5
0 5
С выхода преобразователя 10 коды N , периодически изменяюпщеся по закону, определяемому преобразователем 10, поступают на вход управляемого инвертора 11, на управляющий вход которого поступает сигнал переноса R1 с выхода сумматора 3. В зависимости от уровня сигнала Р1 управляемый инвертор преобразует код N в прямой код
Nn N
о
если , или в обратный код если , который поступает на первые входы сумматора 12. На вторые входы сумматора 12 поступает код S1 или S1. Таким образом, если разность координат текущего положения и заданного меньше нуля, что соответствует низкому уровню сигнала Р1 (), то эта разность в дополнительном коде суммируется с периодически изменяющимся кодом Nn, который проходит без изменений через управляемый инвертор на входы второго сумматора 12. Если разность координат текущего положения и заданного не меньше нуля, что соответствует высокому уровню сигнала Р1 (Р1 1), то эта разность в прямом коде суммируется с К(7-периодически изменякщимся инверсным значением кода N,,, которое проходит на входы сумматора 12 с выхода управляемого инвертора 1I.
На-сумматоре 12 производится операция сложения SI+N, если О ( Р1 1) или Sl+N, если . 0 ( ), что соответствует сложению N с разностью N и Nj , если эта разность меньше нуля, и вычитаниюП
из разности N. и Nj, уменьшенной на единицу, если эта разность не меньше нуля. Сложение S1 с обратным кодом N, а не с дополнительным Н„ при
, Позволяет уменьшить зону нечувствительности до единицы младшего разряда кода координаты объекта.
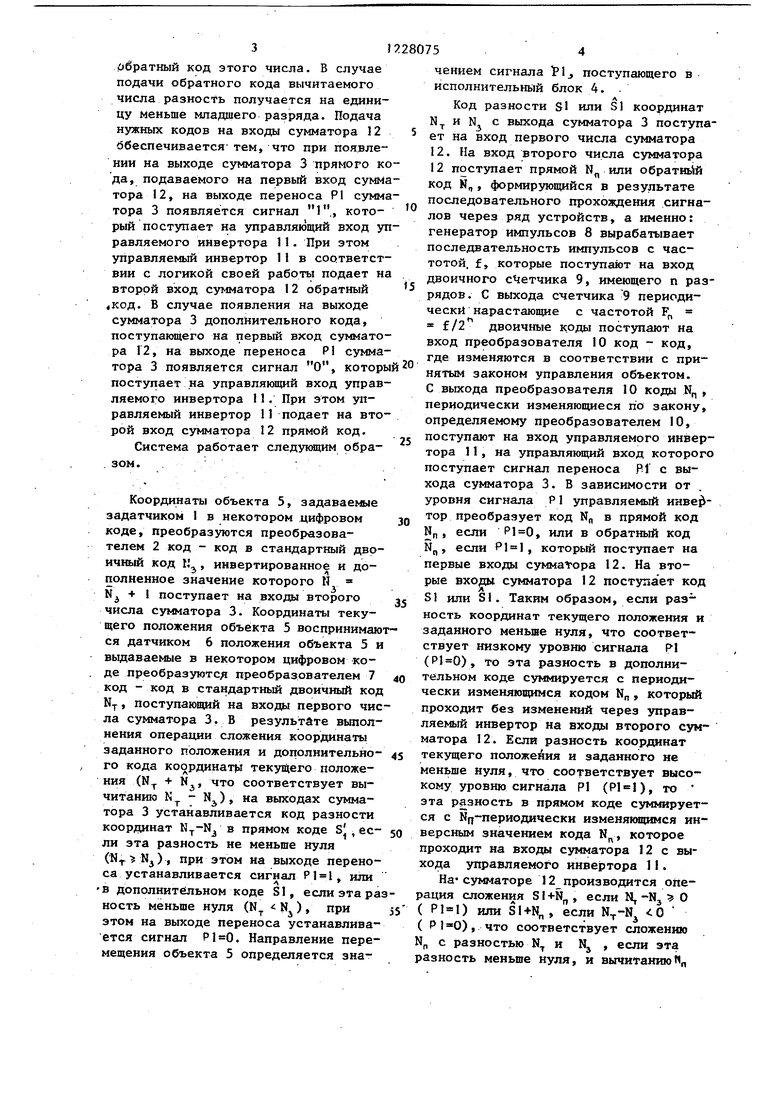
Такая операция сложения обеспечивает формирование сигнала переноса : Р2 на выходе сумматора 12 в соответствии со следующей таблицей.
1 1 О
о
Значения Р2 в таблице получают следующим образом. При на вы-30 ходе сумматора 12 имеем -результат: S2 Sl+N Nn-/N -N3I. На выходе переноса Р2 сумматора 12 формируется сигнал Р при , т.е. 1ри N , или при S2 0, т.е. 35 при N„4/ . При на вы-, ходе сумматора 2 имеем р1езультат: S2 Sl+Ni. При этом сумматор 12 выпол- няет эту операцию сложения как сло- жение S1 с дополнительным кодом некоторого числа N1: S2 Sl+Nl. Тогда,
40
N,.-N,
п
или
+ l 2 -l-Nn . 0тсюда N Nfl +1, S (N +1). Тогда на выходе переноса Р2 суммато-, ра 12 формируется сигнал при , т.е. при N $ , или при S2 0, т,е. при N -1. .,-
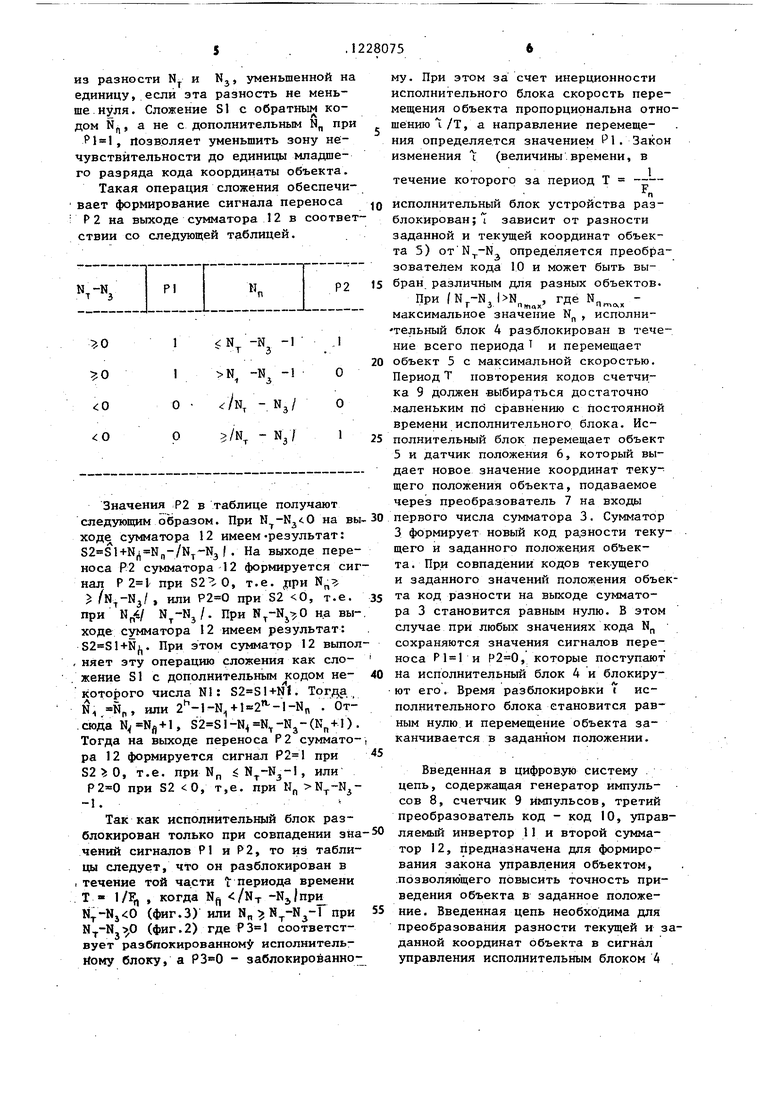
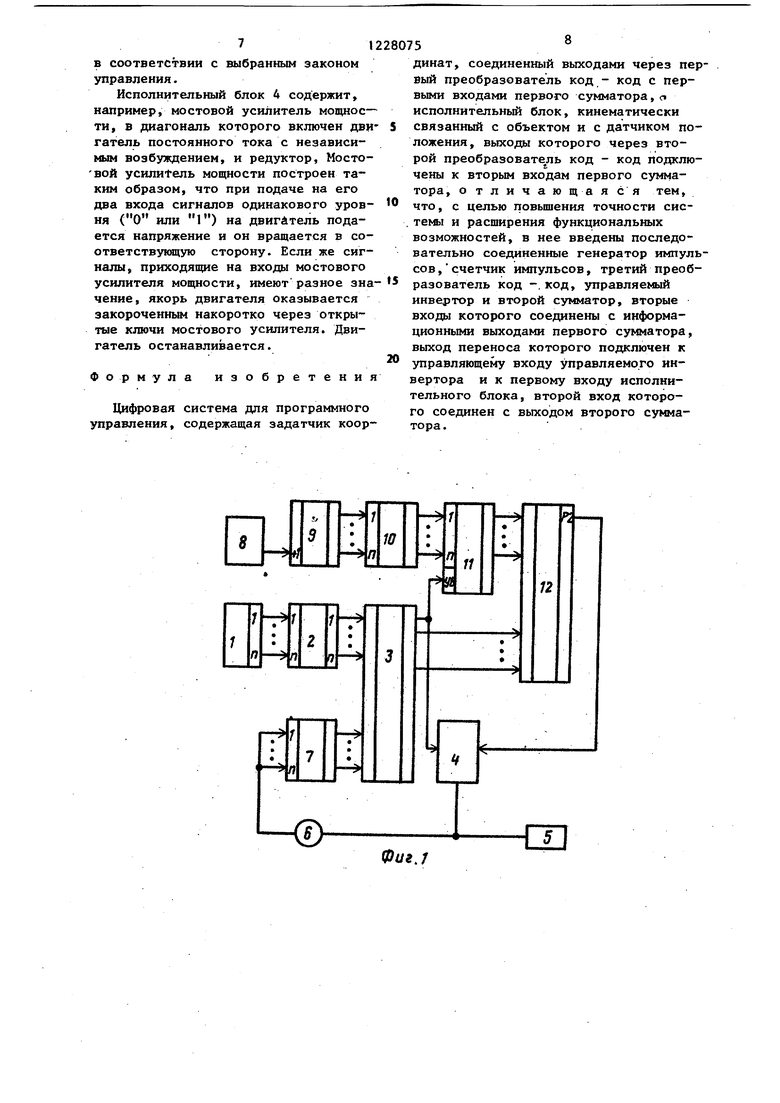
Так как исполнительный блок разблокирован только при совпадении зна-50 чений сигналов Р1 и Р2, то из таблицы следует, что он разблокирован в течение той части t периода времени Т - 1/Г„ , когда Nfj /NT -N,,/npH
(фиг.З) или Н„ РИ (фиг.2) где соответствует разблокированном исполнитель- Кому блоку, а - заблокированно0
0
0
0
му. При этом за счет инерционности исполнительного блока скорость перемещения объекта пропорциональна отношению t /Т, а направление перемещения определяется значением Pi. Закон изменения 1 (величины.времени, в
течение которого за период Т
п
исполнительный блок устройства разблокирован; 7 зависит от разности заданной и текущей координат объекта 5) определяется преобразователем кода 10 и может быть выбран различным для разных объектов.
При (N;-NJ N, где N, максимальное значение N, , исполни- тельный блок 4 разблокирован в течение всего периода и перемещает объект 5 с максимальной скоростью. Период Т повторения кодов счетчика 9 должен выбираться достаточно .маленьким по С15аБнению с постоянной времени исполнительного блока. Исполнительный блок перемещает объект 5 и датчик положения 6, который выдает новое значение координат текущего положения объекта, подаваемое через преобразователь 7 на входы первого числа сумматора 3. Сумматор 3 формирует новый код ра.зности текущего и заданного положения объекта. При совпадении кодов текущего и заданного значений положения объекта код разности на выходе сумматора 3 становится равным нулю. В этом случае при любых значениях кода N,, сохраняются значения сигналов переноса и , которые поступают на исполнительный блок 4 и блокируют его. Время разблокировки Т исполнительного блока становится равным нулю и перемещение объекта заканчивается в заданном положении.
Введенная в цифровую систему цепь, содержащая генератор импульсов 8, счетчик 9 Импульсов, третий преобразователь код - код 10, управляемый инвертор 11 и второй сумматор 12, предназначена для формирования закона управления объектом, .позволяю щего повысить точность приведения объекта в заданное положение . Введенная цепь необходима для преобразования разности текущей и заданной координат объекта в сигнал управления исполнительным блоком 4
в соответствии с выбранным законом управления.
Исполнительный блок А содержит, например, мостовой усилитель мощное- ти, в диагональ которого включен дви гатель постоянного тока с независимым возбуждением, и редуктор, Мосто- вой ycилиteль мощности построен таким образом, что при подаче на его два входа сигналов одинакового уровня (О или 1) на двигАтель подается напряжение и он вращается в соответствующую сторону. Если же сигналы, приходящие на входы мостового усилителя мощности, имеют разное зна чение, якорь двигателя оказывается закороченным накоротко через открытые ключи мостового усилителя. Двигатель останавливается.
Формула изобретения
Цифровая система для программного управления, содержащая задатчик коор
10
228075
динат, соединенный выходами через первый преобразователь код - код с первыми входами первого сумматора,а исполнительный блок, кинематически связанный с объектом и с датчиком положения, выходы которого через второй преобразовате ль код - код подключены к вторым входам первого сумматора, о тличающая ся тем, что, с целью повышения точности системы и расширения функциональных возможностей, в нее введены последовательно соединенные генератор импульсов , счетчик импульсов, третий преобразователь код -. код, управляемый инвертор и второй сумматор, вторые входы которого соединены с информа- ционньши выходами первого сумматора, выход переноса которого подключен к управляющему входу управляемого инвертора и к первому входу исполнительного блока, второй вход которого соединен с выходом второго сумматора .
20
Фиг
V ГNf-Hj
1/1/1/1д
Р2
b
P3 I
l-iK
:
-4
a
Редактор К.Волощук
Составитель И.Швец Техред И.Попович
Заказ 2286/48 Тираж 836 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
-f-t
L
Фиг 2
Фиг.З
Корректор А.Зимокосов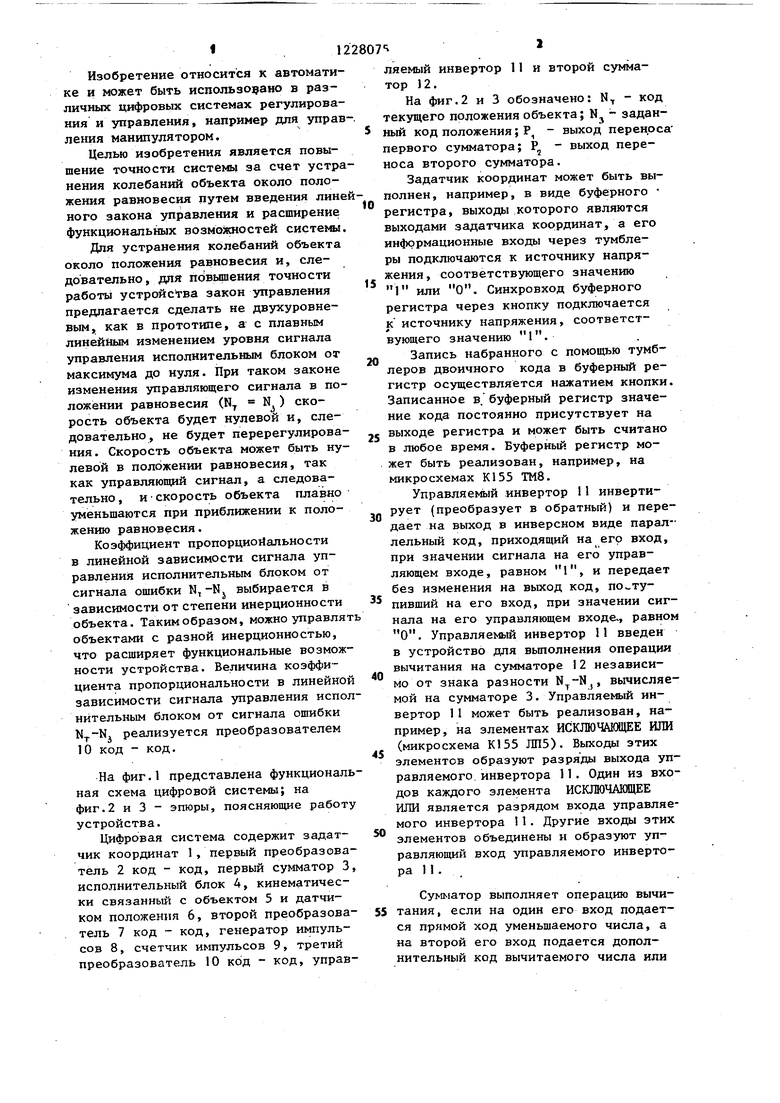
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для цифрового позиционного управления | 1982 |
|
SU1084740A1 |
| Формирователь сигнала цифровой следящей развертки | 1980 |
|
SU936454A2 |
| Устройство для аналого-цифрового преобразования | 1984 |
|
SU1226663A1 |
| Устройство для адресного управления объектом | 1985 |
|
SU1272309A1 |
| СПОСОБ УПРАВЛЕНИЯ СКОРОСТЬЮ ВЗАИМОСВЯЗАННЫХ ПРИВОДОВ | 1989 |
|
RU2025036C1 |
| Цифровое устройство управления | 1983 |
|
SU1128221A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Система оптимального управления | 1979 |
|
SU824140A2 |
| ИМИТАТОР УГЛА ПОВОРОТА АНТЕННЫ РЛС | 1987 |
|
SU1841003A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
Изобретение относится к автоматике и может быть использовано в различных цифровых системах регулирования и управления, например, для управления манипулятором. Целью изоб- ретения является повышение точности системы за счет устранения колебаний объекта около положения равновесия путем введения линейного закона управления и расширения функциональных возможностей системы. Цифровая система датя программного управления содержит задатчик координат, соединен- ньш выходами через первый преобразователь код - код с первыми входами первого сумматора, исполнительный блок, кинематически связанный с объектом и датчиком положения, второй преобразователь код - код и введенные последовательно соединенные генератор импульсов, счетчик импульсов, третий преобразователь код - код, управляемый инвертор и второй сумматор. Введенная цепь указанных признаков предназначена для формирования закона управления объектом, позволяющего повысить точность приведения объекта в заданное положение. 3 ил., 1 табл. i (Л ю 1C 00 vj ел
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для приведения объекта в заданное положение | 1981 |
|
SU999013A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
