Устройство для комплексного управления органами сложного механизма при помощи следящего привода, управляемого от модели указаного мехаппзма, и имеющее ряд следящих систем, связанных с отдельными органами механизма и управляющими осями модели, известгю. Однако оно не обладает возможностью задания исполнительному механизму многократного сложного перемещения с возвращением каждый раз в исходное положение.
В предложенном устройстве в каждом узле управления применены два комплекта следящих систем, один из которых связан с управляющей осью и осью исполнительного органа. Другой комплект связан только с осью исполнительного органа. iB схемах управления следящих комплектов одни реле включены в цепь торможения точных следящих систем и служат для поочередного подключения своими замкнутыми и разомкнутыми контактами других реле, снабженных самоблокировкой. В устройстве применен также счетный механизм с контактами и электромагнитом.Такая конструкция устройства позволяет задавать исполнительному механизму многократные сложные перемещения с возвращением каждый раз в исходное положение и осуществлять повторные перемещения лищь после отработки заданных перемещений всеми органами механизма.
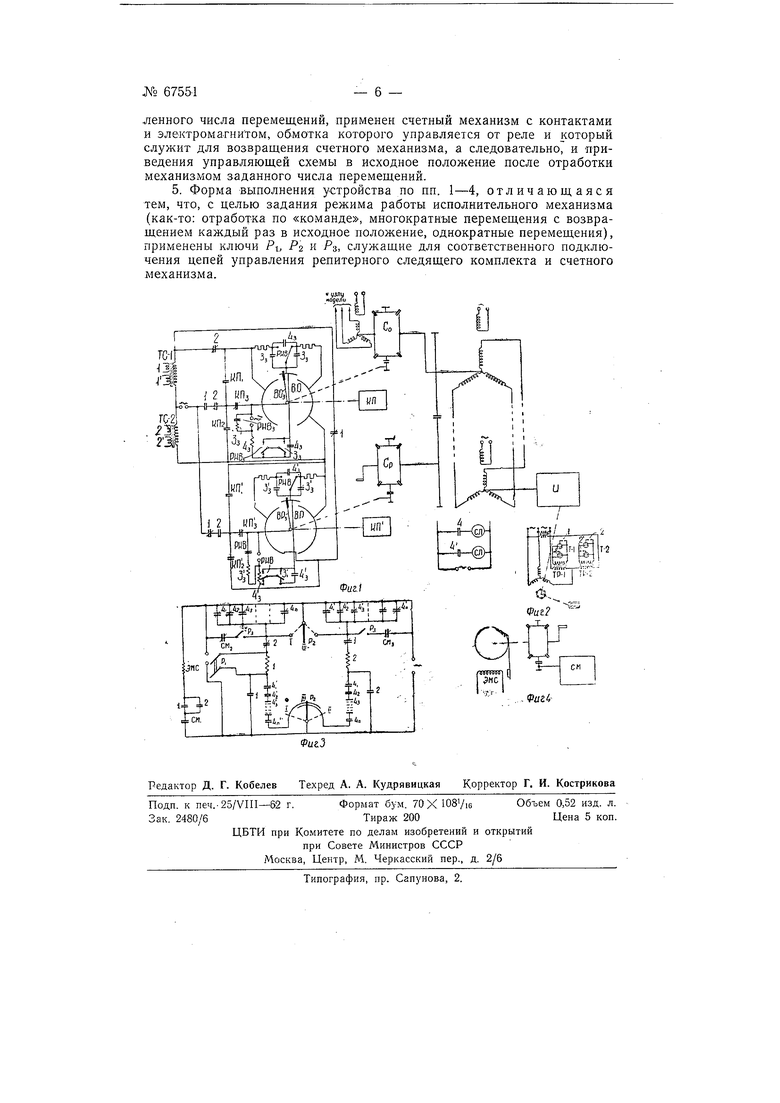
На фиг. 1 изображена основная схема устройства; на фиг. 2 - схема действия верньерной следящей системы; на фиг. 3 - схема устройства при разомкнутых ключах PI и Pj и замкнутом ключе Ра; на фиг. 4 - схема возврата устройства в исходное положение.
При задании угла с одного из сеточных трансформаторов ТС-1 или ТС-2 снимается запирающее напряжение. При этом зажигаются тиратроны группы Т-1 или Т-2 (фиг. 2). Двигатель, отрабатывая заданное перемещение, возвращает движок верньерной системы в исходное по№ 67551- 2 ложение. В конце отработки движок попадает на дужку противовключения, присоединенную через контакты реле направления вращения РНВ и его электрического демпфера (реле 3) к контактному полукольцу обратного направления вращения двигателя.
При этом один из сеточных трансформаторов (например, ТС-) обесточивается, а другой трансформатор (например, ТС-2) получает питание и, следовательно, тиратроны Т-2 тухнут, а тиратроны Т-1 зажигаются. Двигатель попадает в режим противовключения и затормаживается. При повороте на угол срабатывания реле РНВ в обратном направлении (30°) последнее перекидывает свои контакты и трансформатор ТС-1 снова получает запирающее напряжение. Таким образом, тиратроны группы Т-1 тухнут. При этом срабатывает реле 4, которое, самозаблокировавщись через свой нормально разомкнутый контакт, подает напряжение обоим запирающим сеточным трансформаторам ТС-1 и ТС-2, в результате чего обе группы тиратронов ТС-1 и ТС-2 тухнут. Таким образом, отработка угла всегда начинается с отпускаяия реле 4 и оканчивается его срабатыванием. В схеме применены два комплекта верньерных следящих систем. В. О.-верньер основной следящей системы и В. Р.-верньер репитерной следящей системы. Циклические перемещения рабочих органов исполнительных механизмов производятся посредством переключения с одного комплекта следящих систем на другой.
Принцип действия грубой следящей системы заключается в следующем.
При задании угла отработки, больщего угла чувствительности грубой следящей системы В.О., срабатывает контактное приспособление КП, которое своим нормально разомкнутым контактом КП или КПз подменяет верньерную следящую систему, а своим нормально замкнутым контактом КПз отключает от нее питание. Схема будет оставаться в таком положении до тех пор, пока угол не будет отработан настолько, чтобы смогло отпустить контактное приспособление КП. В момент, когда оно отпустит, движок BL/s верньерной следящей системы 5. О. будет находиться в том месте контактного полукольца, в котором он был при срабатывании приспособления КП, так как последнее и движок верньерной следящей системы сидят на одной оси. Эта система работает от модели. Поэтому вся часть автоматики вынесена на пульт, который связывается с одной стороны с управляющей моделью, а с другой стороны - с исполнительным механизмом U. В качестве синхронной связи с пультом рационально применить или систему сельсин, или систему С.П.Т. Последняя особенно пригодна, если модель имеет незначительные размеры, так как в системе С.П.Т. датчиком является ключкоммутатор. Связь между движком верньерной следящей системой, датчиком и исполнительным механизмом осуществляется через дифференциал Со. Верньер репитерной следящей системы В.Р. связывается с исполнительным механизмом U также через дифференциал Ср, и одна из дифференциальных щестерней служит для согласования систем. Непосредственной связи с датчиком (моделью) репитерная система В.Р. не имеет. Перемещения от датчика (модели) передаются на основную верньерную следящую систему ВО посредством системы синхронной связи. При задании основной следящей системы ВО угла отработки реле 4 отпускает, и исполнительный механизм U, соверщая заданное перемещение, возвращает движок ВОз основной верньерной системы в исходное положение. Одновременно при перемещении исполнительного механизма, посредством системы синхронной связи заводится
репитерная следящая система ВР на угол, пропорциональный отработанному углу.
Таким образом, когда ось основной верньерной следящей системы ВО полностью отработает заданный угол а, на репитерной следящей системе ВР этот угол будет воспринят, и ее движок ВР будет заведен на угол - а. Чтобы исполнительный механизм вернулся в исходное положение, достаточно переключить управление на репитерную систему, которая отработает имеющийся на ней угол (-а) и тем самым возвратит исполнительный механизм в исходное положение. При перемещении исполнительного механизма через систему синхронной связи и дифференциал основная верньерная следящая система ВО заводится на угол, пропорциональный перемещению исполнительного механизма и, после того, как репитерная система ВР закончит отработку угла (-а), движок основной верньерной следящей системы будет заведен на угол а. Если вновь перенести управление на основную следящую систему, то процесс отработки пойдет в рассмотренном порядке.
Таким образом, для того чтобы вернуть исполнительный механизм и в исходное положение, достаточно перенести управление на репитерную следящую систему ВР, а для того чтобы повторить заданное перемещение, нужно перенести управление с репитерной на основную следящую систему ВО. Подключение управляющих сеточных трансформаторов ТС-1 и ТС-2 к основной и к репитерной следящим системам производят командные реле 1 и 2. При срабатывании реле / реле 2 обесточивается и в нормально замкнутых контактах реле / разрывается цепь репитерной следящей системы, а через нормально разомкнутые контакты реле 1 замыкается цепь основной следящей системы. При срабатывании реле 2 обесточивается реле /ив нормально замкнутом контакте реле 2 разрывается цепь основной следящей системы, а через нормально разомкнутый контакт реле 2 включается репитерная следящая система. Сложные движения должны повторяться только после того, как все рабочие органы закончили свои перемещения.
Из рассмотрения схемы (фиг. 1) следует, что реле 4 w. 4 отпускают в начале задания угла и срабатывают, как только отработка угла будет закончена. Двигатель затормозится противовключением. Поэтому командные реле / и .2 (общие для следящих систем всех рабочих органов) поставлены в зависимость от реле - -основных следящих систем и s-репитерных следящих систем. При разомкнутых ключах PI и РЗ и замкнутом ключе Ра (фиг. 3) все основные и все репитерные следящие системы стоят в начальных положениях, а все реле 4 и 4 находятся под током. (Индексами 1, 2, 3,... на чертеже обозначены реле следящих систем рЗбочих органов № 1, 2, 3,..., например 4,-- обозначает реле 4 рабочего органа № 3 и т. д.). В этом положении все нормально разомкнутые контакты и 4„- замкнуты, а нормально разомкнутые и разомкнуты. Таким образом, командные реле 7 и 2 обесточены. При задании одной или нескольким основным следящим системам угла отработки а реле 4 этих систем отпускают (например, отпускает реле 4) и замыкают свои нормально разомкнутые контакты (например, контакт 4$). Образуется цепь для командного реле /, так как репитерная система находится в начальном положении и нормально разомкнутые реле i замкнуты. Сработавщее реле 1 самоблокируется и подключает к управляющим сеточным трансформаторам ТС-1 и ТС-2 основные следящие системы ВО. Двигатель (третьего рабочего органа) начинает отрабатывать заданный ему угол и при этом заводится репитерная следящая система ВР, а движок БОз основной верньерной еле-:
- 3 -№ 67551
№ 67551
дящей системы ВО возвращается в исходное положение. Как только ВРз. репитерной верньерной следящей системы сойдет с дужки противовключения, отпустит реле и разорвет свой нормально разомкнутый контакт цепи, по которой сработало командное реле /; однако оно продолжает держаться на самоблокировке. Одновременнс замыкается нормально разомкнутый контакт реле 4з в цепи реле 2, но последнее сработать не может, так как разомкнут нормально замкнутый контакт реле / и разомкнут нормально разомкнутый контакт реле 4з. Основная следящая система третьего рабочего органа отрабатывает заданное перемещение, и реле 4з обеспечивается. По заверщении третьим рабочим органом заданного перемещения движок BOz основной верньерной следящей системы возвращается в исходное положение, и срабатывает реле 4з, которое разрывает свой нормально замкнутый контакт в цепи командного реле /,и замыкает свой нормально разомкнутый контакт в цепи командного реле 2. Цепь реле 2 подготовлена, так как все основные следящие системы ВО находятся в начальном положении и их реле 4- под током. Следовательно, все нормально разомкнутые контакты реле 4 замкнуты и, кроме того, замкнут нормально замкнутый контакт реле 4, так как репитерная следящая система ВР заведена, и реле 4 отпустило. Размыкание нормально замкнутого контакта в цепи реле / приводит к отпусканию этого реле, вследствие чего отключаются основные следящие системы ВО и замыкается нормально замкнутый контакт реле /, включенный в цепь командного реле 2. Командное реле 2 срабатывает, самоблокируется и .подключает к управляющим сеточным трансформаторам ТС-1 и ТС-2 репитерпые следящие системы ВР. Движок верньерной репитерной следящей системы заведен на угол (-а), и двигатель третьего рабочего органа начинает возвращать рабочий орган в исходное положение. При этом заводится основная следящая система ВО и отпускает реле 4s, командное же реле 2 остается на самоблокировке. По отработке угла (-а) срабатывает реле 4;j, разрывая цепь реле 2. По следпее отпускает и отключает репитерные следящие системы. Реле /, цепь которого подготовлена нормально замкнутым контактом , срабатывает и подключает основные следящие системы ВО. Основная следящая система ВОз начинает отрабатывать заданный ей угол а. Таким образом, рабочий орган будет повторять заданное перемещение неограниченное число раз.
Если одновременно будут заданы перемещения нескольким рабочим органам, то командные реле У и 2 не будут обеспечены до тех пор, пока все органы не соверщат заданных перемещений, т. е. не сработают все реле 4 и 4i. Если в схеме автоматики произощла авария и одно из реле 4 или 4 не сработало, то ложных повторных движений производиться не будет, так как в этом случае не образуется цепь для командных реле / или 2 и переключение следящих систем не произойдет.
Если условия эксплуатации не требуют повторения перемещений, то достаточно работать только на основных следящих системах. Для этого нужно замкнуть ключ PI, что влечет за собой срабатывание реле 1, подключающего основные следящие системы.
Ключи PI, Р2.-Рз представляют собой многократные джеки или ключи типа «И. Ключ PZ - трехпозиционный. Если ключ Ра переключить из положения /// в положение //, то после того как основные системы отработают заданное перемещение, переключения на репитерные следящие системы не произойдет, так как цепь для командного реле не образуется, хотя и будет подготовлена. Реле 2 подключает репитерпую следящую систему только после того, как ключ PZ будет переключен из положения / в положение // и отпустит реле /. Таким образом, путем
переключения ключа Р из положения / в положение // и обратно имеется возможность получения отработки перемещения по «команде.
В практике часто бывают случаи, когда рабочие органы исполнительного механизма должны совершать заданные перемещения определенное число раз. Для этого в схеме по фиг. 1 предусмотрен электромагнитный счетчик ЭМС. Если нужно, чтобы рабочие органы совершили п движений, то задают через дифференциал счетного механизма п оборотов. При этом .разрываются нормально замкнутые контакты счетного механизма СМ и СМ, а нормально разомкнутый контакт счетного механизма СМ подготовляет цепь электромагнита счетчика ЭМС. Последний будет считать число срабатываний командных реле 1 и 2, т. е. число прямых и обратных перемещений рабочих органов исполнительного механизма. Электромагнит, срабатывая, поворачивает зубчатое колесо, которое через дифференциал возврашает счетный механизм в исходное положение (фиг. 4). При этой операции ключ PI должен быть разомкнут, ключ РЗ - замкнут, а ключ Pg должен находиться в положении ///. После того как рабочие органы совершат заданное число перемещений, счетный механизм вернется в исходное положение, в результате чего контакт СМ отключит электромагнит счетчика и замкнутся нормально замкнутые контакты СМз и СА4з. При этом те следящие системы, командные реле которых в это время были под током, отключиться не смогут, так как сохраняется питание командного реле через нормально замкнутый контакт СМ и замкнутый ключ РЗПредмет изобретения
1.Устройство для комплексного управления органами сложного механизма при помощи следящего привода, управляемого, например, от модели указанного механизма и имеющего ряд следящих систем, связанных с отдельными органами механизма и управляющими осями, с частности, модели, отличающейся тем, что, с целью задания исполнительному механизму многократного сложного перемещения с возвращением каждый раз в исходное положение, в каждом узле управления применены два комплекта следящих систем, один из которых связан, как обычно, с управляющей осью и осью исполнительного органа, а другой - лищь с осью последнего таким образом, чтобы при отработке заданного угла и возвращении первого комплекта в исходное положение второй комплект заводился на этот же%гол с автоматическим переключением в конечных положениях схемы управления следящим приводом с одного следящего комплекта на другой.
2.Форма выполнения устройства по п. 1, отличающаяся применением в схемахуправления указанных следящих комплектов двух групп реле, из которых первые реле включены в цепь торможения точных следящих систем и служат для поочередного взаимоисключающего подключения своими нормально замкнутыми и нормально разомкнутыми контактами вторых реле, снабженных самоблокировкой и предназначенных включать соответствующий комплект следящих систем.
3.Форма выполнения устройства по п. 2, отличающаяся тел|, что, с целью осуществления повторных перемещений лпщь после отработки заданных перемещений всеми органами механизма, в цепь вторых реле каждого узла управления введены в последовательном соединении нормально разомкнутые контакты и в параллельном соединении нормально замкнутые контакты первых реле всех узлов управления.
4.Форма выполнения устройства по пп. 1-3, отличающаяся тем, что, с целью задания органам исполнительного механизма опреде№ 67551
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1941 |
|
SU67772A1 |
| Следящий привод | 1941 |
|
SU67550A1 |
| Устройство для реверсирования трехфазного асинхронного двигателя | 1941 |
|
SU63376A1 |
| Телемеханическое устройство | 1935 |
|
SU48689A1 |
| Устройство для авторегулирования и телемеханики | 1935 |
|
SU48688A1 |
| Устройство для автоматического нанесения метеорологических данных на бланк синоптической карты | 1935 |
|
SU115927A1 |
| Устройство для однофазной индукционной синхронной передачи угла | 1937 |
|
SU55166A1 |
| Система коммутации исполнительных органов с неразрушающем контролем элементов коммутации и исполнительных органов | 2016 |
|
RU2652718C1 |
| Программный регулятор температуры | 1978 |
|
SU809106A1 |
| СЛЕДЯЩЕЕ УСТРОЙСТВО | 1971 |
|
SU302690A1 |