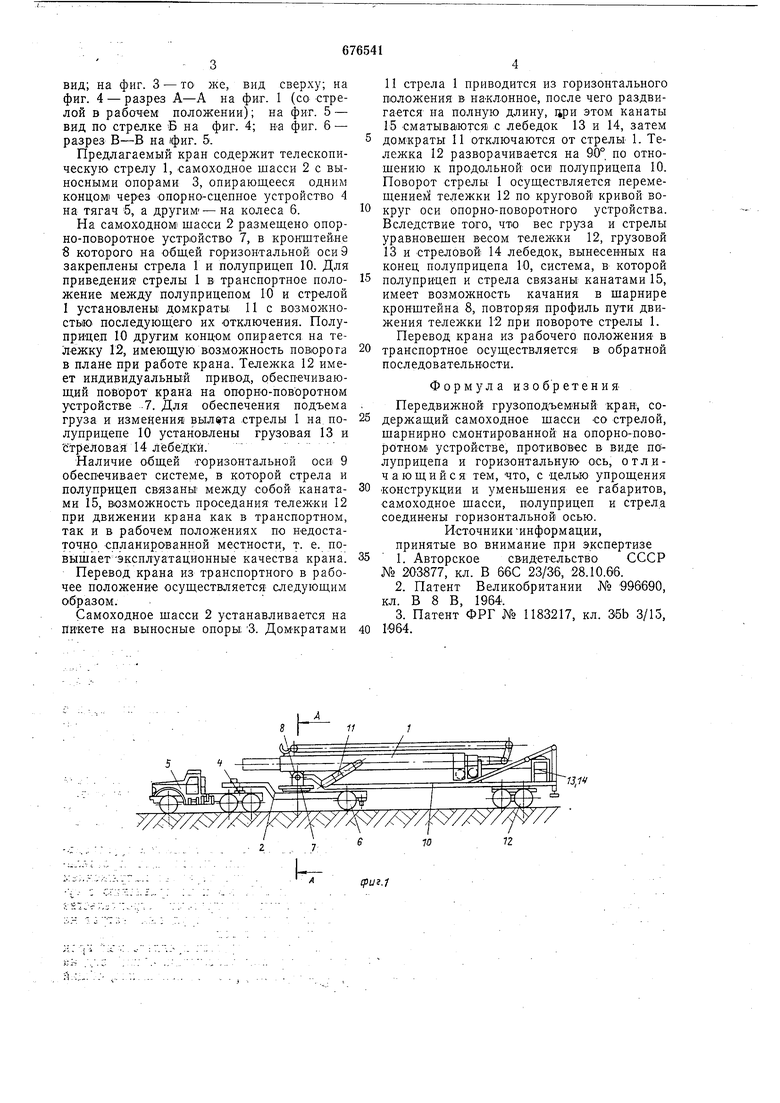
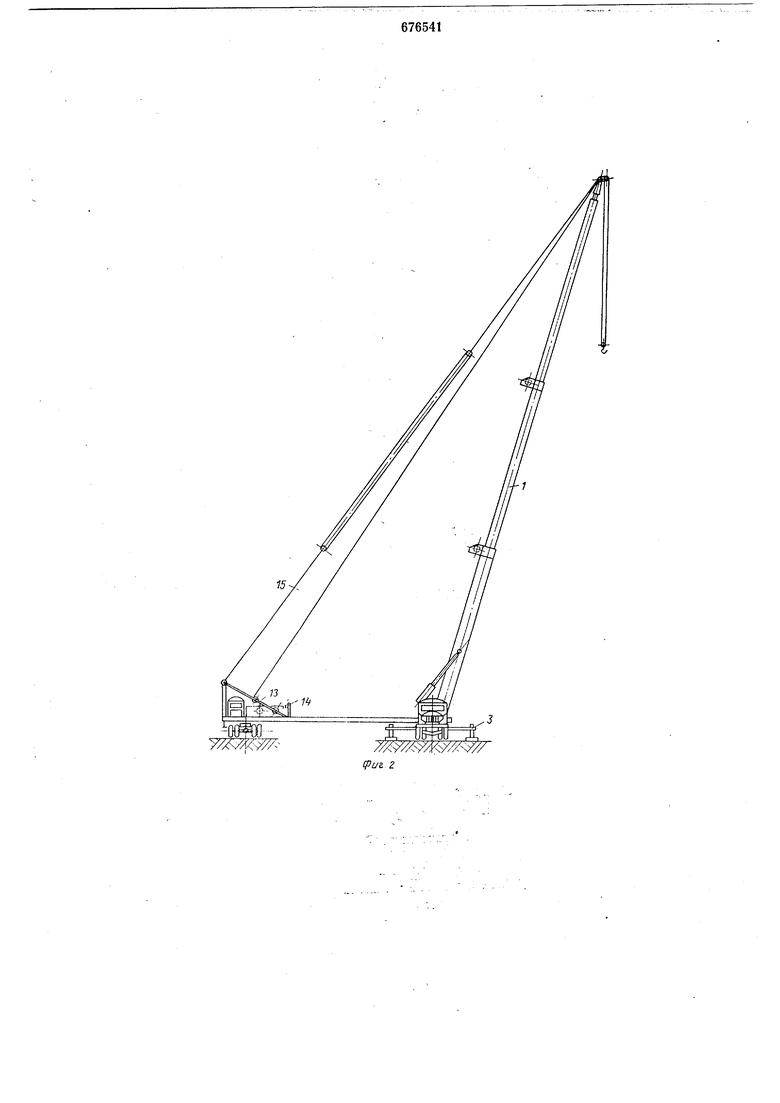
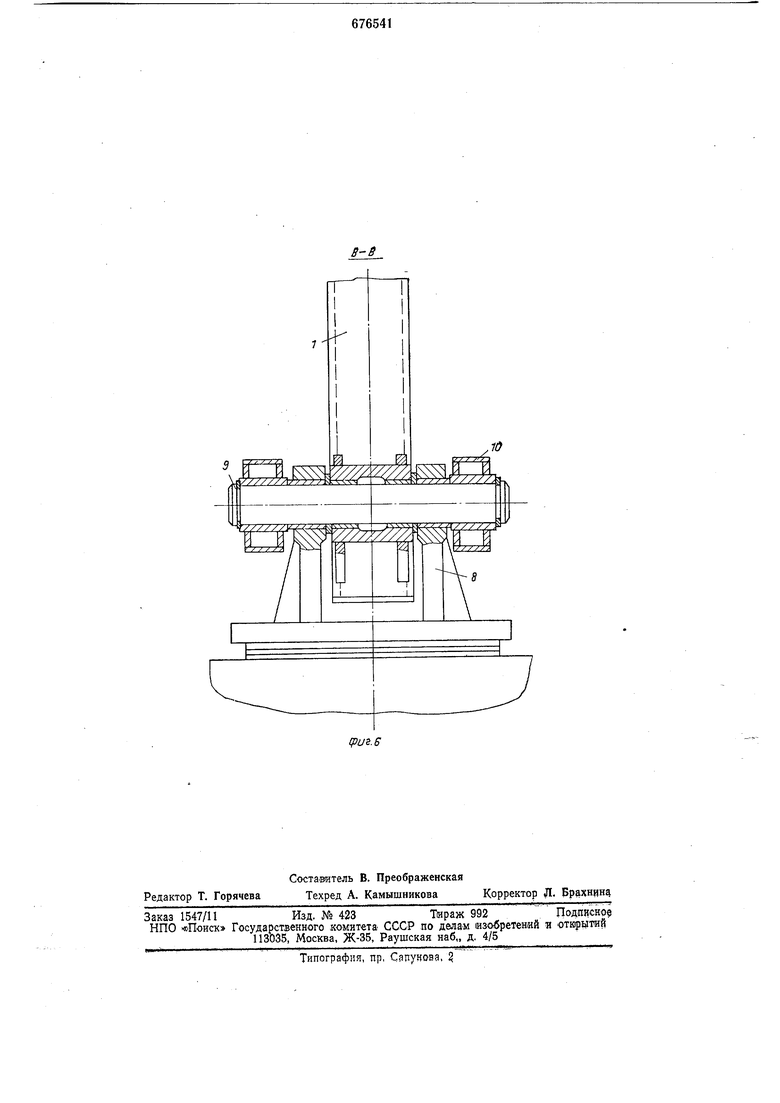
вид; на фиг. 3 - тО же, вид сверху; на фиг. 4 - разрез А-А на фиг. 1 (со Стрелой в рабоЧ-ем положении); на фиг. 5 - вид по стрелке Б на фиг. 4; на фиг. 6 - разрез на фиг. 5. Предлагаемый кран содержит телескопическую стрелу 1, самоходное шасси 2 с выносными опорами 3, опирающееся одним КОНЦОМ1 через опорно-сцепное устройство 4 на тягач б, а другим- на колеса 6. На самоходном шасси 2 размещено опорно-поворотное устройство 7, в кронштейне 8 которого на общей гор-изо®тальной осиЭ закреплены стрела 1 и полуприцеп 10. Для приведения стрелы 1 в транспортное положение между полуприцепом 10 и I установлены; домкраты; И с возможностью, последующего их отключения. Полуприцеп 10 другим концом опирается на тел-ежку 12, имеющую возможность поворога в плане при работе крана. Тележка 12 имеет индивидуальны;й привод, обеспечивающий пОЁОрот крана на опорно-поворотном устройстве -7. Для обеспечения подъема груза и изменения вылета стрелы 1 на полуприцепе 10 установлены грузовая 13 и стреловая 14 Лебедки. Наличие горизонтальной оси 9 обеспечивает системе, в которой стрела и полуприцеп связаны между собой канатами 15, возможность проседания тележки 12 при движении крана как в транспортном, так и в рабочем положениях по недостаточно спланированной местности, т. е. повышает -эксплуатационные качества крана Перевод крана из транспортного в рабочее положение осуществляется- следующим образом. Самоходное щасси 2 устанавливается на Пикете на выносные опоры 3. ДомКратами И стрела 1 приводится из горизонтального положения в наклонное, после чего раздвигается на полную длину, при этом канаты 15 сматываются с лебедок 13 и 14, затем дом;краты 11 отключаются от стрелы 1. Тележка 12 разворачивается на 90° по отношению к продольной оси полуприцепа 10. Поворот стрелы 1 осуществляется перемещением тележки 12 по круговой кривой вокруг оси опорно-поворотного устройства. Вследствие того, что вес груза и стрелы уравновещен весом тележ-ки 12, грузовой 13 и стреловой 14 лебедок, вынесенных на конец полуприцепа 10, система, в которой полуприцеп и стрела связаны канатами 15, имеет возможность качания в шарнире кронштейна 8, повторяй профиль пути движения тележки 12 при повороте стрелы 1. Перевод крана из рабочего положения в транспортное осуществляется в обратной последовательности. Формула изобретения Передвижной грузоподъем ный кран, содержащий самоходное шасси со стрелой, шарнирно смонтированной на опорно-поворотном устройстве, противовес в виде поуприцепа и горизонтальную ось, отличающийся тем, ЧТО, с целью упрощения конструкции и уменьщения ее габаритов, амоходное щасси, полуприцеп и стрела оединены горизонтальной осью. Источники -информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 203:877, кл. В 66С 23/36, 28.10.66. 2.Патент Великобритании № 996690, л. В 8 В, 1964. 3.Патент ФРГ № 1183217, кл. Э5Ь 3/15 964.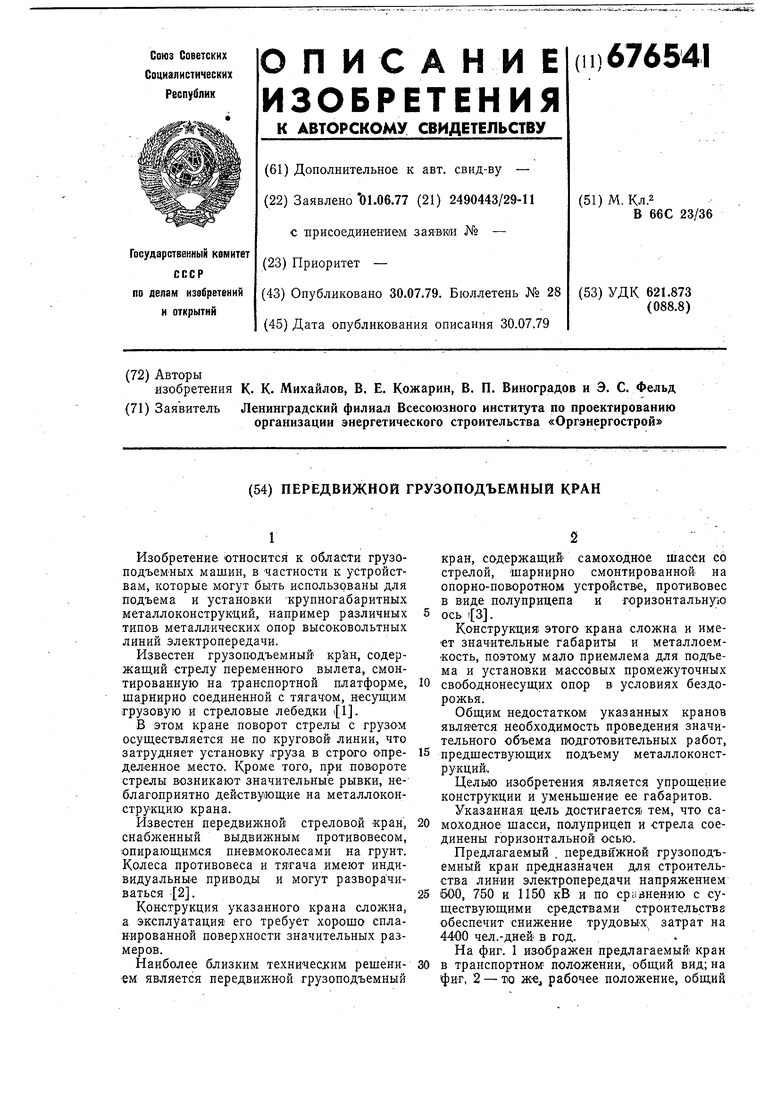
| название | год | авторы | номер документа |
|---|---|---|---|
| Самоходный грузоподъемный кран | 1986 |
|
SU1370057A1 |
| Манипулятор для проведения грузовых работ | 1976 |
|
SU674970A1 |
| КРАН СТРЕЛОВОЙ САМОХОДНЫЙ | 2014 |
|
RU2567472C1 |
| БАШЕННО-СТРЕЛОВОЙ КРАН | 1973 |
|
SU405807A1 |
| Передвижной кран с задвигаемой в транспортное положение стрелой | 1973 |
|
SU519386A1 |
| КРАН-МАНИПУЛЯТОР ЛЕСОВОЗНЫЙ | 1999 |
|
RU2169673C2 |
| САМОХОДНЫЙ ДВУХСТРЕЛОВОЙ КРАН | 2011 |
|
RU2465191C2 |
| ПЛАВУЧЕЕ ПОДЪЕМНОЕ СРЕДСТВО БОЛЬШОЙ ГРУЗОПОДЪЕМНОСТИ | 2006 |
|
RU2320529C1 |
| Способ работы стрелового самоходного крана и устройство для его осуществления | 2019 |
|
RU2730730C1 |
| Самоходный кран | 1973 |
|
SU509521A1 |

.
::: :--:-
IpUi.l
iput.Z
иг.З
А-А
V
0u- j
ГГ.,.
у/////л/у ) к
