(54) ХОДОВОЙ МЕХАНИЗМ ШАГАЮЩЕГО ТИПА
| название | год | авторы | номер документа |
|---|---|---|---|
| Ходовой механизм шагающей машины | 1977 |
|
SU676698A1 |
| Шагающий механизм | 1978 |
|
SU713967A1 |
| Шагающий ходовой механизм | 1976 |
|
SU653354A1 |
| Ходовой механизм шагающего типа | 1979 |
|
SU819284A1 |
| Ходовой механизм | 1974 |
|
SU609892A2 |
| ХОДОВОЕ ОБОРУДОВАНИЕ ТЯЖЕЛЫХ МАШИН | 1973 |
|
SU397612A1 |
| Шагающее устройство землеройной машины | 1983 |
|
SU1121365A1 |
| Шаговое ходовое устройство для землеройных машин | 1973 |
|
SU646013A1 |
| Ходовой механизм щагающего типа | 1976 |
|
SU659695A1 |
| МЕХАНОГИДРАВЛИЧЕСКИЙ КОМБАЙН | 2003 |
|
RU2244826C1 |
.„.. J
Изобретение относится к механизмам передвижения горных машин, применяемых при открытых разработках месторождений полезных ископаемых и может быть использовано для механизмов передвижения тяжелых добычных, строительных и транспортных j машин.
Известен ходовой механизм шагающего типа, включающий две опорно-ходовые лыжи и два опорно-поворотных башмака 1.
Недостаток указанного устройства заключается в том, что наличие рпорно-пово- Ю ротных башмаков усложняет конструкцию и увеличивает вес.i, Кроме того, отсутствует возможность перемеш,ения во взаимно-перпендикулярных направлениях.
Известен ходовой механизм шагающего типа 2, включающий основную раму с опорами по углам и в центре, несколько вертикально расположенных гидродомкратов, жестко присоединенных к основной раме, опорно-ходовых лыж, соединенных 20 дистанционными связями. Нижний конец каждого вертикально расположенного домкрата соединен универсальным шарниром с ползуном, перемешающимся в поперечном
направлении в направляющих каретки. Каретка перемещается в продольном направлении в направляющих опор но-ходовых лыж. Для перемещения опорно-ходовых лыж в продольном и поперечном направлениях устройство снабжено несколькими гидроцилиндрами, причем один из концов гидроцилиндров шарнирно соединен с основной рамой машины, а второй - с опорно-ходовыми лыжами.
Недостатками данного устройства являются сложность управления механизмол хода и ограниченность области его применения.
Сложность управления механизмом хода обусловлена наличием большого количества приводов продольного и поперечного перемещения и неудачным выбором места их присоединения к элементам ходового механизма.
Любое перемещение мащины, даже прямолинейное, требует управляющего выдвижения всех щтоков гидроцилиндров приводов поперечного и продольного перемещений а для осуществления его предварительно необходимо произвести расчет его параметров .на геометрической модели.
Кроме того, известное устройство может применяться при передвижении поотносиTevibHo ровной предварительно спланированной поверхности, например в доках.
Целью изобретения является упрощение управления механизмом.
Указанная цель достигается тем, что ка рет1 й сбёдинень,с лыжами приводами продольного перемещения, а по крайней мере на одной из лыж каретки соединены С ползунами приводами поперечного перемещения.
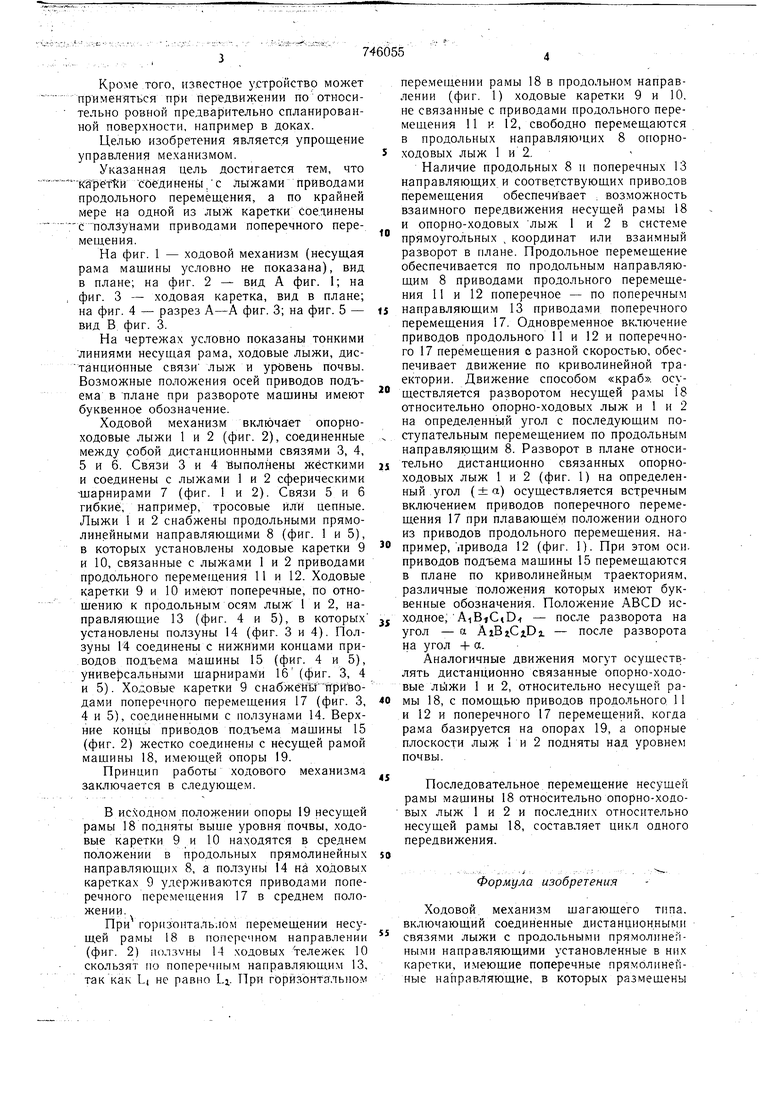
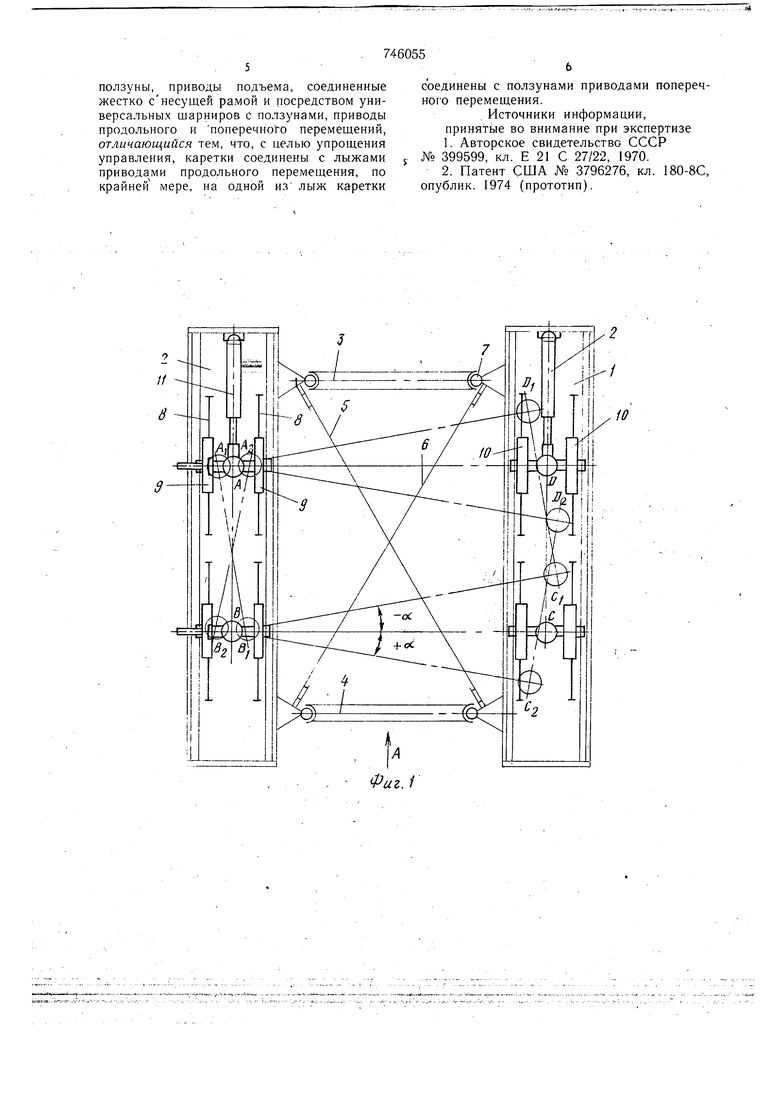
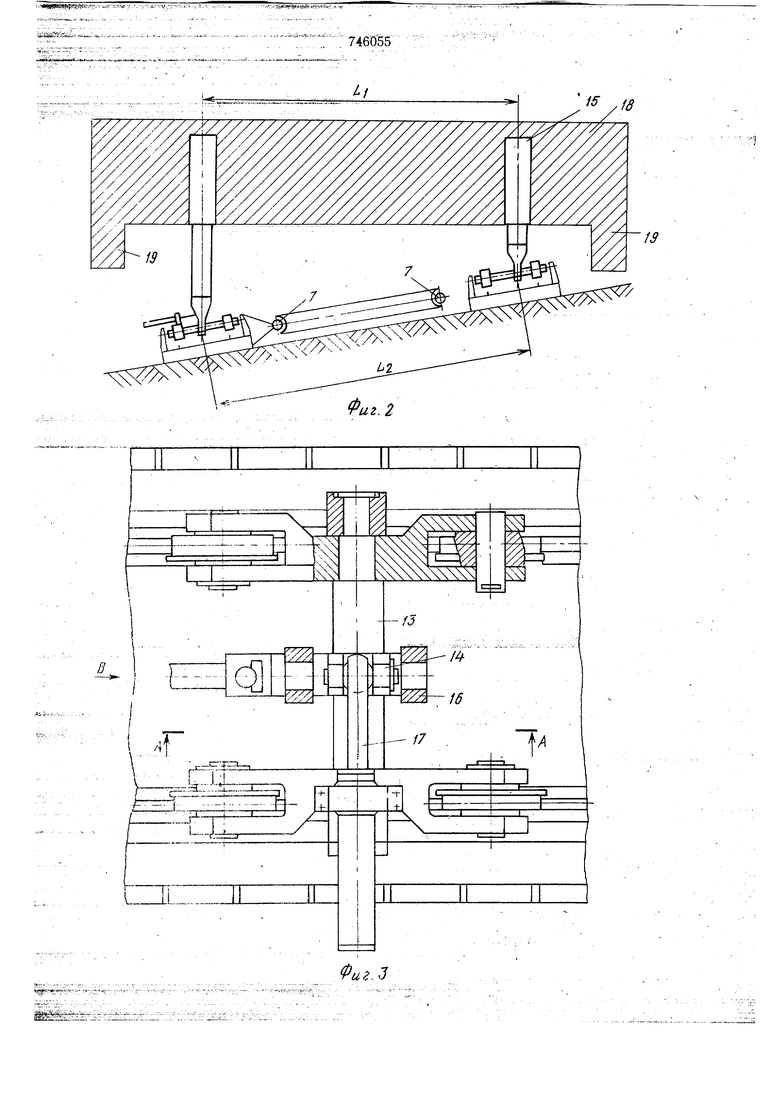
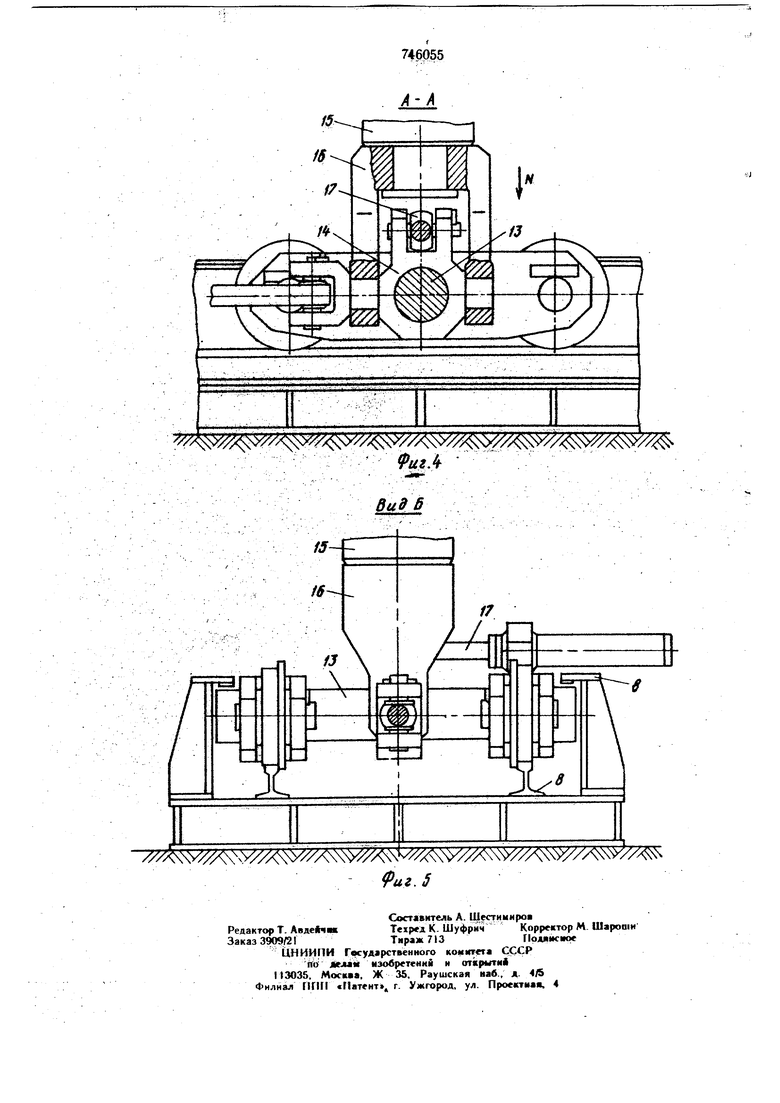
На фиг. 1 - ходовой механизм (несущая рама мащины условно не показана), вид в плане; на фиг. 2 - вид А фиг. 1; на фиг. 3 - ходовая каретка, вид в плане; на фиг. 4 - разрез А-А фиг. 3; на фиг. 5 - вид В фиг. 3.
На чертежах условно показаны тонкими ЛИНИЯМИ несущая рама, ходовые лыжи, дистанционные связи лыж и уровень почвы. Возможные положения осей приводов подъема в плане при развороте мащины имеют буквенное обозначение.
Ходовой механизм включает опорноходовые лыжи 1 и 2 (фиг. 2), соединенные между собой дистанционными связями 3, 4, 5 и 6. Связи 3 и 4 быполнены жёсткими и соединены с лыжами 1 и 2 сферическими -щарнирами 7 (фиг. 1 и 2). Связи 5 и 6 гибкие, например, тросовые Или цепНые. Лыжи 1 и 2 снабжены продольными прямолинейными направляющими 8 (фиг. 1 и 5), в которых установлены ходовые каретки 9 и 10, связанные с лыжами 1 и 2 приводами продольного перемещения 11 и 12. Ходовые каретки 9 и 10 имеют поперечные, по отнощению к продольным осям лыЖ 1 и 2, направляющие 13 (фиг. 4 и 5), в которых установлены ползуны 14 (фиг. 3 и 4). Ползуны 14 соединены с нижними концами приводов подъема мащины 15 (фиг. 4 и 5), универсальными щарнирами 16(фиг. 3, 4 и 5). Ходовые каретки 9 снабжёйЪГПрйводами поперечного перемещения 17 (фиг. 3, 4 и 5), соединенными с ползунами 14. Верхние концы приводов подъема мащины 15 (фиг. 2) жестко соединены с несущей рамой мащины 18, имеющей опоры 19.
Принцип работы ходового механизма заключается в следующем.
В ис.чодном положении опоры 19 несущей рамы 18 подняты выше уровня почвы, ходовые каретки 9 и 10 находятся в среднем положении в продольных прямолинейных направляющих 8, а ползуны 14 на ходовых каретках 9 удерживаются приводами поперечного перемещения 17 в среднем положении.
При горизонталь,ЮМ перемещении несущей рамы 18 в поперечном направлении (фиг. 2) ПОЛЗУНЫ 14 ходовых тележек 10 скользят по поперечным направляющим 13, так как L( не равно Lj. При горйзонталыюм
перемещении рамы 18 в продольном направлении (фиг. 1) ходовые каретки 9 и 10. не связанные с приводами продольного перемещения 11 и 12, свободно перемещаются в продольных направляющих 8 опорноходовых лыж 1 и 2.
Наличие продольных 8 и поперечных 13 направляющих и соответствующих приводов перемещения обеспечивает ; возможность взаимного передвижения несущей рамы 18 и опорно-ходовых лыж 1 и 2 в системе прямоугольных , координат или взаимный разворот в плане. Продольное перемещение обеспечивается по продольным направляющим 8 приводами продольного перемещения 11 и 12 поперечное - по поперечным
направляющим 13 приводами поперечного перемещения 17. Одновременное включение приводов продольного 11 и 12 и поперечного 17 перемещения с разной скоростью, обеспечивает движение по криволинейной траектории. Движение способом «краб, осуществляется разворотом несущей рамы 18 относительно опорно-ходовых лыж и 1 и 2 на определенный угол с последующим поступательным перемещением по продольным направляющим 8. Разворот в плане относительно дистанционно связанных опорноходовых лыж 1 и 2 (фиг. 1) на определенный угол ( ± а) осуществляется встречным включением приводов поперечного перемещения 17 при плавающем положении одного из приводов продольного перемещения, например, привода 12 (фиг. I). При этом оси, приводов подъема мащины 15 перемещаются в плане по криволинейным траекториям, различные положения которых имеют буквенные обозначения. Положение ABCD исходное; AiBiCtD.) - после разворота на угол - а AiBjCiDj. - после разворота на угол + а.
Аналогичные движения могут осуществлять дистанционно связанные опорно-ходовые лижи 1 и 2, относительно несущей рамы 18, с помощью приводов продольного 11 и 12 и поперечного 17 перемещений, когда рама базируется на опорах 19, а опорные плоскости лыж 1 и 2 подняты над уровнем почвы.
Последовательное перемещение несущей
рамы мащины 18 относительно опорно-ходовых лыж 1 и 2 и последних относительно
несущей рамы 18, составляет цикл одного
передвижения.
Формула изобретения
Ходовой, механизм щагающего типа, включающий соединенные дистанционными связями лыжи с продольными прямолинейными направляющими установленные в них каретки, и.меющие поперечные прямолинейные направляющие, в которых размещены
ползуны, приводы подъема, соединенные жестко снесущей рамой и посредством универсальных шарниров с ползунами, приводы продольного и поперечного перемещений, отличающийся тем, что, с целью упрощения управления, каретки соединены с лыжами привода ми продольного перемещения, по крайней мере, на одной из лыж каретки
соединены с ползунами приводами поперечного перемещения.
Источники информации, принятые во внимание при экспертизе
В
Фиг.З
