(54) ХОДОВОЙ МЕХАНИЗМ ШАГАЮЩЕГО ТИПА

| название | год | авторы | номер документа |
|---|---|---|---|
| Ходовой механизм шагающего типа | 1976 |
|
SU692949A1 |
| Шагающий ходовой механизм для шнекобуровых машин | 1976 |
|
SU614216A1 |
| Шагающее ходовое оборудование | 1973 |
|
SU702129A1 |
| Ходовой механизм шагающей машины | 1977 |
|
SU676698A1 |
| Шагающий механизм | 1978 |
|
SU713967A1 |
| Шагающее ходовое оборудование | 1988 |
|
SU1546571A1 |
| ШАГАЮЩЕЕ ХОДОВОЕ ОБОРУДОВАНИЕ | 1993 |
|
RU2034963C1 |
| Шагающее ходовое оборудование | 1983 |
|
SU1124100A1 |
| Опорно-ходовая часть тяжелых машин | 1983 |
|
SU1129298A1 |
| САМОХОДНАЯ ШАГАЮЩАЯ ТЕЛЕЖКА МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНЫ | 2012 |
|
RU2496304C1 |
1
Данное изобретение относится к ходовым механизмам шагающего типа, предназначеннным для перемещения тяжелых машин, и может быть использовано в землеройных и горнодобывающих машинах.
Известен ходовой механизм шагающего типа, включающий несущую раму, опирающуюся через гидродомкраты и ходовые тележки на лыжи, соединенные между собой шарнирно 1.
Каждая тележка соединена с лыжей продольным гидроцилиндром так, что корпус гидроцилиндра соединен с тележкой, а щток - с концом лыжи.
Одним из недостатков конструкции данного ходового механизма является излом оси щтока относительно оси корпуса под действием собственного веса гидроцилиндра при значительном ходе штока, что вызывает интенсивный износ контактирующих поверхностей щтока и корпуса.
Наиболее близким техническим решением к данному изобретению является ходовой механизм шагающего типа, включающий лыжи, ходовые тележки, установленные в направляющих лыж и связанные с несущей рамой, и гидроцилиндры; корпус каждого из которых соединен с ходовой тележкой и имеет промежуточную опору 2.
Самоустанавливающиеся промежуточные опоры позволяют устранить излом оси щтока относительно оси корпуса.
Однако габариты и вес лыж являются излищне большими в связи с тем, что длина лыж в значительной степени определяется длиной гидроцилиндров.
Целью изобретения является сокращение габаритов и веса лыж.
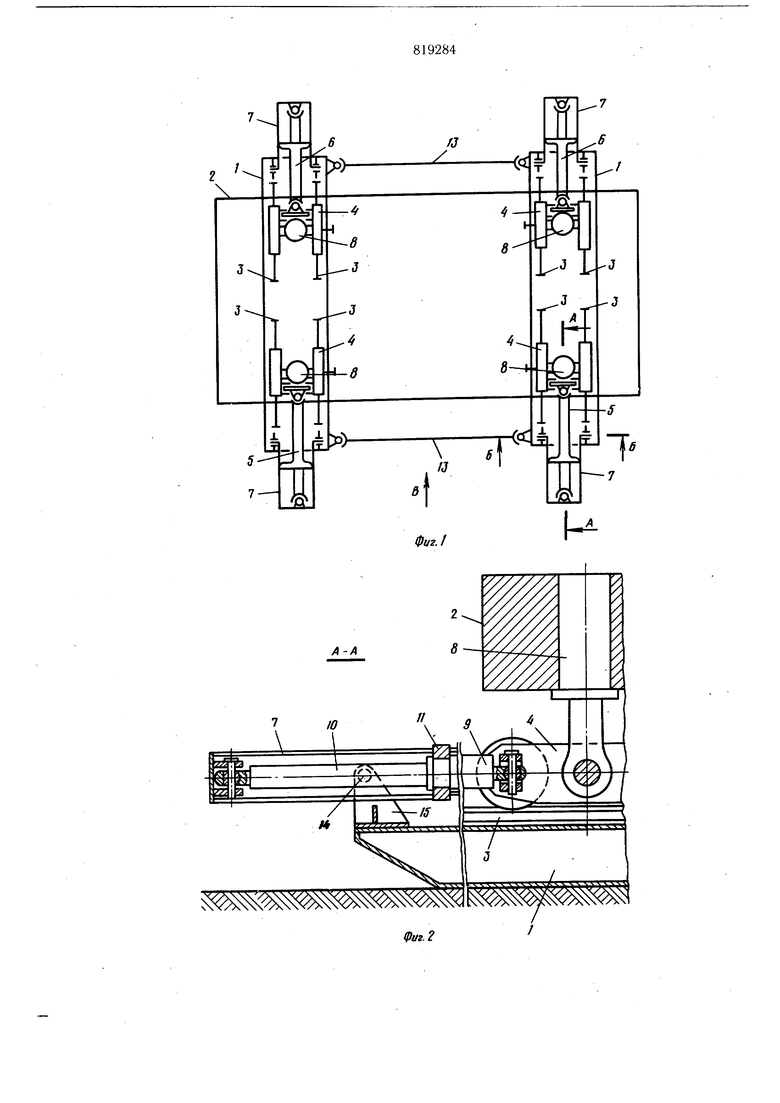
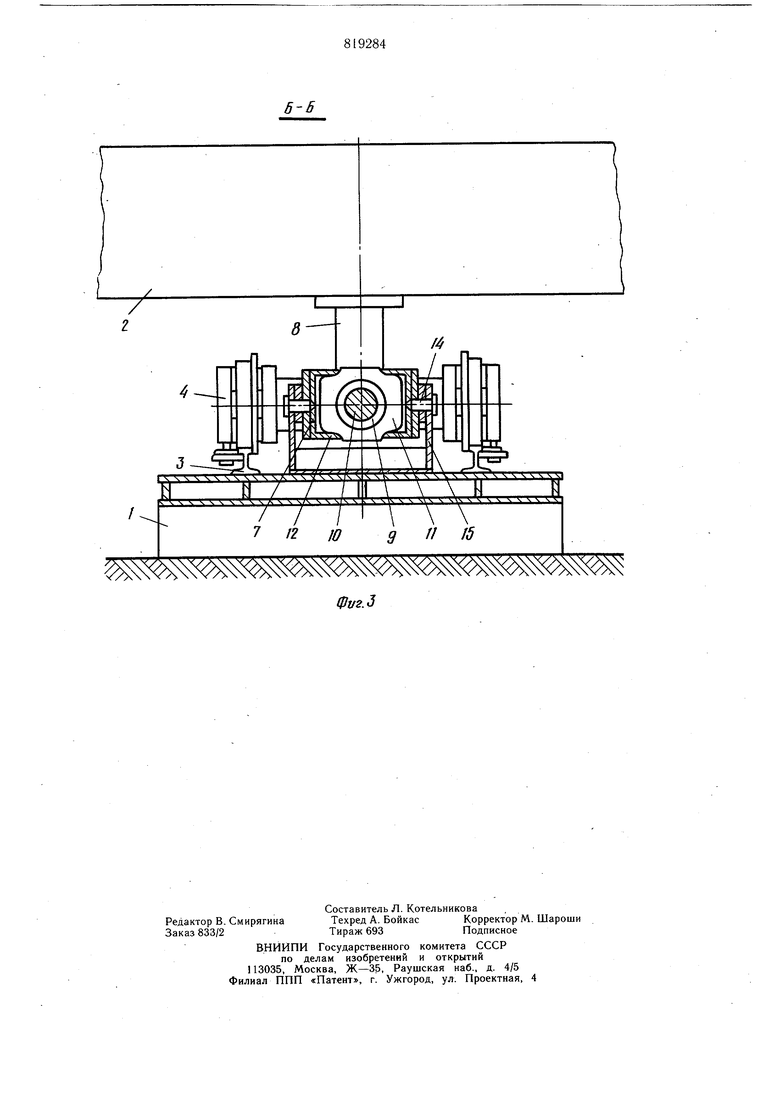
Эта цель достигается тем, что ходовой механизм шагающего типа, включающий лыжи, ходовые тележки, установленные в направляющих лыж и связанные с несущей, рамой, и гидроцилиндры, корпус каждого из которых соединен с ходовой тележкой и снабжен промежуточной опорой, снабжен консольно закрепленной на каждом конце лыжи рамкой, которая щарнирно связана со штоком гидроцилиндра и с лыжей, при этом опорная рамка имеет направляющие, в которых установлена промежуточная опора гидроцилиндра. На фиг. 1-показана кинематическая схема ходового механизма шагающего типа, вид в плане; на фиг. 2 - разрез А-А фиг. 1; на фиг. 3 - разрез Б-Б фиг. 2. Ходовой механизм шагающего типа содержит лыжи 1, несущую раму 2, продольные прямолинейные направляющие 3 для ходовых тележек 4, продольные гидроцилиндры 5 и 6, опорные рамки 7 и приводы 8 подъема несущей рамы. Продольные гидроцилиндры 5 и 6, расположены вдоль лыж 1 и каждый из них содержит корпус 9 и щток 10. Шток 10 каждого гидроцилиндра шарнирно закреплен на опорной рамке 7, а корпус 9 шарнирно прикреплен к балансирам ходовых тележек 4 и снабжен промежуточной опорой 11, шарнирно охватывающей корпус 9 и контактирующий с направляющими j2 опорной рамки 7. Лыжи 1 между собой соединены жесткими элементами 13. Ходовые тележки 4 подвижно размещены на прямолинейных направляющих 3 каждои из лыж 1 и связаны с несущей рамой 2 через приводы подъема 8. Опорные рамки 7 закреплены на концах лыж, консольно посредством шарниров 14 и кронщтейнов 15. Устройство работает следующим образом. В процессе перемещения ходового механизма, например несущей рамы 2 в направлении стрелки В (фиг. 1), гидроцилиндры 5 соединяют с напорной линией, а гидроцилиндры 6 - со сливной линией. Под действием давления рабочей жидкости корпус каждого гидроцилиндра сдвигается со штока 10. При этом конец каждого корпуса 9 своей промежуточной опорой 11 скользит по направляющей 12 опорной рамки 7, устраняя возможные перекосы в гидроцилиндрах 5 и б от составляющих веса их щтоков 10 и корпусов 9. Шарнирное же соединение корпуса 9 с балансирами ходовой тележки 4 и промежуточной опорой 11, а также штока 10 с опорой рамкой 7, и наличие шарнира 14 компенсируют неточность взаимного расположения опорной рамки 7 и ходовой тележки 4, умеющую место из-за наличия рабочих зазоров в направляющих 3 лыж 1, возможных технологических погрешностей изготовления, перекосов лыж 1 при опирании на наклонное грунтовое основание и их упругой деформации под действием приложенных нагрузок. После использования рабочего хода гидроцилиндров 5 и 6, данный цикл перемещения ходовых тележек 4 и несущей рамы 2 заканчивается. Затем несущую раму 2 приводами 8 опускают до опоры, на грунтовое основание, а лыжи 1 с ходовыми тележками 4 подтягивают под несущую раму 2, обеспечив зазор между грунтовым основанием и лыжами 1. Далее гидроцилиндры 6 соединяют с напорной линией, а гидроцилиндры 5 - со сливной линией, в результате чего лыжи 1 выдвигаются вперед по стрелке fi при неподвижной раме 2 и ходовых тележках 4. При выдвижении лыж 1 взаимодействие опорных рамок 7 и гидроцилиндров 5 и 6 происходит такое же, как и в предыдущем цикле шагания. По окончании данного цикла шагания несущую раму 2 приводами подъема 8 отрывают от грунтового основания и переводят ее опору на ходовые тележки 4 лыж 1. После этого вышеописанные циклы шагания повторяются. Таким образом, данная конструкция ходового механизма шагающего типа позволяет сократить длину лыж за счет консольной шарнирной установки на их концах опорных рамок, к которым крепятся штоки гидроцилиндров, что снижает вес лыж и их габариты. Сокращение длины лыж позволяет также снизить требования к допустимым местным неровностям грунтового основания, что сокращает капитальные затраты на подготовку рабочей трассы для движения машины. Формула изобретения 1.Ходовой механизм щагающего типа, включающий лыжи, ходовые тележки, установленные в направляющих лыж и связанные с несущей рамой, и гидроцилиндры, корпус каждого из которых соединен с ходовой тележкой и имеет промежуточную опору, отличающийся тем, что, с целью сокращения габаритов, он снабжен консольно закрепленной на каждом конце лыжи рамкой, которая шарнирно связана со штоком гидроцилиндра и с лыжей. 2.Механизм по п. 1, отличающийся тем, что опорная рамка имеет направляющие, в которых установлена промежуточная опора гидроцилиндра. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 222982, кл. Е 02 F 9/04, 1967. 2.Авторское свидетельство СССР по заявке № 2416068, кл. Е 02 F 9/04, 1977 (прототип) .
Фиг. 2 Фьг.5
