В кораблевождении для определе1ИЯ истинного меридиана кораблешдителю приходится всегда учиты;ать то обстоятельство, что гиросомпас при движении корабля к тому тли иному полюсу дает показания 16 истинного меридиана, а направлеше. некоторой составляющей, завиящей от скорости этого движения и иироты местоположения корабля. Ко аблеводитель, следовательно, долкен определять угол между направле ием составляющей и направлением истинного меридиана. Этот угол оп1еделяется подющью приборов, носядах название корректоров скоростой девиации по уравнению
у-cos к
QJOcos 95 ± о sin К.
да: V - скорость корабля в узлах, С - курс, р - широта места, 900 - корость вращения точки экватора
узлах.
В тех случаях, когда корабль обадает приборами с абсолютным счисением, т. е. со счислением по земным оординатам, для внесения поправки коростной девиации может служить
предлагаемый согласно настоящему изобретению корректор, в основу которого положено уравнение:
ЫЛ
QM±VESicy
где: Удт-абсолютная скорость корабля к полюсу в з/злах, 5 г9 ;т-числовое значение, принятое вмеркаторском построении карт,
VE - абсолютная скорость корабля в направлениях Ост- Вест в узлах, 9ПО - скорость вращения точки экватора в узлах.
Отличие предлагаемого корректора скоростной девиации корабля от известных конструкций заключается в том, что для определения угла скоростной девиации в зависимости от абсолютных показателей (по зел.ным координатам) применен рычаг, связанный с кареткой; каретка эта устанавливается в зависимости от произведения величины скорости корабля по направлению к полюсам на величину соответствующего широте места отношения меркаторского по251
строения и поворачивает указанный рычаг на угол скоростной девиации вокруг оси, передвигаемой посредством второй каретки в направлении, перпендикулярном направлению первой каретки на величину угловой скорости корабля около оси земного шара.
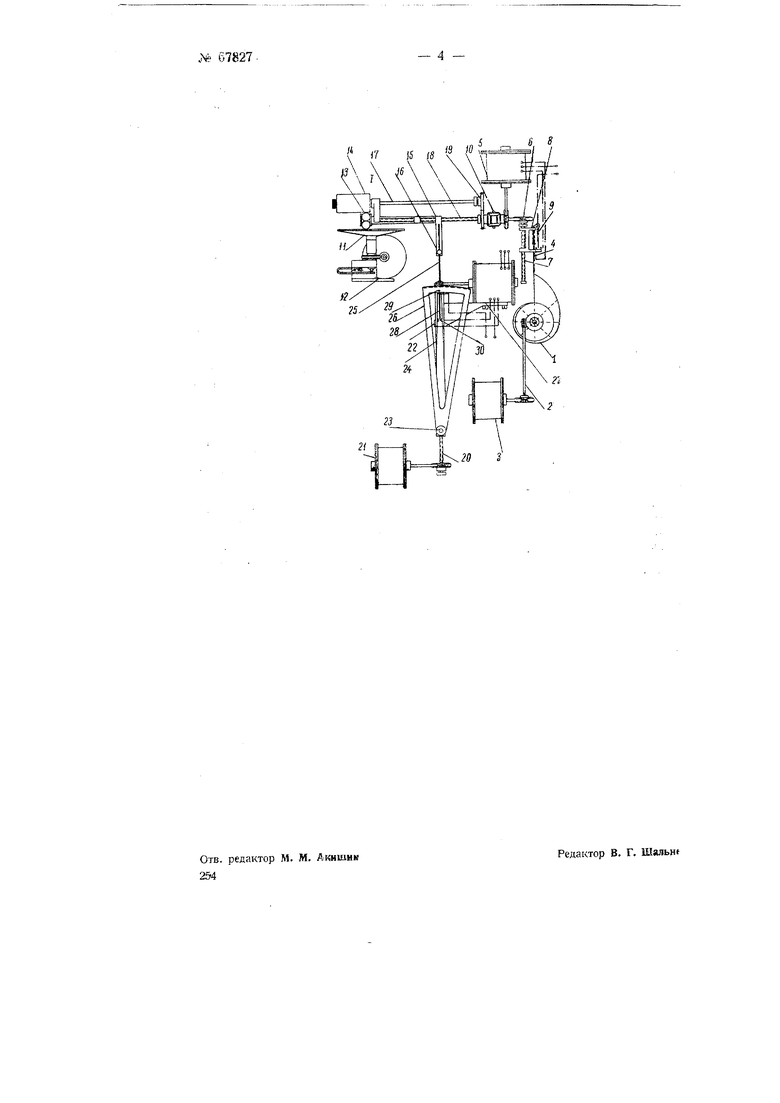
На чертеже изображена принципиальная схема конструкции предлагаемого корректора скоростной девиации корабля.
Устройство корректора заключается в следующем: синхронный электродвигатель 3, вращающийся со скоростью, пропорциональной скорости корабля, сцеплен передачей 2 с профилированным спиральным кулачкол /, профиль которого соответствует адеркаторским величиналч, отложенным на соответствующих той или иной широте радиусах. В кромку спирального кулачка упирается подпружиненный штифт 4, установленный на каретке 8; в противоположный конец штифта 4 упирается короткое плечо неравноплечего рычага 9, длинное плечо которого расположено контактами, не касаясь их. Каретка 6 установлена на ходовом винте 7 и может при его вращении перемещаться; ходовой винт 7 передачей 6 сцеплен с электродвигателем 5.
Таким образом, при вращении электродвигателя 3 кулачок / будет перемещать штифт 4 и поворачивать рычаг 9, который при своем повороте замкнет один из контактов цепи электродвигателя 5. Электродвигатель 5 переместит каретку 8 в соответствии с поворотом кулачка / на расстояние, соответствующее величине Slcyn,.
Для преобразования оборотов электродвигателя 5 в скорость Vf служит фрикционный тахометр /, состоящий из диска 7/, приводимого во вращение электродвигателем 72, фрикционного барабана 74 и передаточных шариков 73, защемленных между поверхностью диска 77 и барабаном 74. Барабан 74 соединен передачей 77, 79 с шестерней диференциала W, вторая шестерня которого сцеплена с электродвигателем 5. Са252
теллиты диференциала 70 насажень на ходовой винт 75, несущий каретку 75 с обоймой для шариков 73. Перемещаясь между поверхностями диска 77 и барабана 74, шарики 73 уста-. навливают каретку 75 в то положение, когда скорости вращения барабана 74 и электродвигателя 5 будут совпа.дать. На выступающем колене каретки 75 установлена поворотная головка 76 с отверстием. В отверстие головки входит могущий передвигать ся в нем штифт 25, служащий продолжением рычага 24.
Рычаг 24 может поворачиватьс} вокруг оси 23; длина его между головкой 76 и осью 23, если он установ лен в среднем положении, соответ ствует скорости вращения точки эк ватора в узлах, т. е. содержит 90( единиц длины. При приближении ил1 удалении оси 23 от головки 76 - длина рычага уменьшается или уве личивается. Это изменение длины про изводится устройством, состоящим и; ходового винта 20, установленногперпендикулярно к ходовому винт 78 против исходного положения го ловки 76. На ходовом винте 20 уста новлена могущая передвигаться ка ретка 22 с осью 23, а сам ходово винт 20 приводится во вращени синхронным электродвигателем 27 передающим скорость движения ко рабля в направлениях Ост-Вест.
Если приборы корабля, определяв щие его скорость в направления Ост-Вест, дают линейные величинь. то им придается широтная поправк в соответствующе.м масштабе i}SlC(f если же они дают скорость в угле вых величинах, то поправка не тр( буется, так как W ,„.
Таким образом, длина рычага 2 между головкой 16 и осью 23 буде выражать величину 900--ygS/C9 m. При движении каретки 75 рычаг 2 будет отходить от своего постоянно: положения на угол д, являющийс поправочным углом скоростной д виации.
Для передачи величины этого уг; на пульт служит устройство, состо; щее из установленного на каретке I электродвигателя 27, состоящего i
реверсивной коллекторной части и трансмистерного сельсина. Реверсивная коллекторная часть приводится 3 действие путем замыкания рычагом 28 одного из установленных на рычаге 24 контактов 30. Короткое алечо 29 рычага 2S зажато в зубчатой шестерне 26, свободно насаженной на ось 23 и сцепленной с электродвигателем 27. Замыкание контактов 30 происходит в момент движения оычага 24 и заставляет электродвигатель 27 своим вращением следить за этим движением.
Предмет изобретения
1. Корректор скоростной девиации корабля, отличающийся тем, iro для определения угла скоростной девиации, в зависимости от абсолютных показателей (по земным координатам), применен рычаг 24-25, :вязанный с кареткой 75, устанав7ивающейся в зависимости от значения произведения величины скорости корабля по направлению к юлюсам на величину соответствующего широте места отношения мерк:аторского построения и поворачизающей рычаг 24-25 на угол скоростной девиации вокруг оси 23, передвигаемой посредством каретки 22 в направлении, перпендикулярном движению каретки 75, на величину угловой скорости кораб;1Я около оси земного шара.
2.Форма выполнения корректора по п. 1, отличающаяся применением для передвижения каретки 75 тахометрического фрикциона /, вращаемого с постоянной скоростью и сцепленного с ним через диференциал 70 множительного механизл1а, состоящего из повторяющего скорость движения корабля в направлении к полюсам синхронного электродвигателя 3, вращающего профилированный по расходящейся на величину меркаторских построений спиральный кулачок /, взаимодействующий со штифтом 4, управляющим замыканиел контактов цепи электродвигателя 5 в зависимости от положений штифта 4 на диске /.
3.Форма выполнения корректора по пп. I и 2, отличающаяся применением для передвижения каретки 22 синхронного электродвигателя 27, повторяющего угловую скорость движения корабля около оси земного шара.
4.Форма выполнения корректора по пп. I-3, отличающаяся применением для поворота рычага 24-25 установленного на каретке 22 реверсивного электродвигателя 27, сцепленного с насаженным на оси 23 зубчатым сектором 26 и включаемого в цепь тока через контакты 30, установленные на рычаге 24-25 и замыкаемые рычагом 28, установленным на секторе 26.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидроскопический компас | 1940 |
|
SU59832A1 |
| Автопрокладчик | 1977 |
|
SU695331A1 |
| Аппарат тактильного типа для чтения слепыми | 1956 |
|
SU107019A1 |
| Аппарат для чтения слепыми условного плоскопечатного текста | 1956 |
|
SU114786A1 |
| Часы для показания истинного солнечного времени | 1928 |
|
SU21036A1 |
| АВТОМАТИЧЕСКИЙ СТАНОК ТИПА ПАНТОГРАФА ДЛЯ ОБРАБОТКИ ФАСОННЫХ ПОВЕРХНОСТЕЙ | 1934 |
|
SU40129A1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| Пишущая машина | 1934 |
|
SU43012A1 |
| ПОВОРОТНЫЙ СТОЛ ДЛЯ ИСПЫТАНИЯ ПРИБОРОВ | 1935 |
|
SU47096A1 |
| Способ определения направления меридиана на подвижном объекте | 1978 |
|
SU720301A1 |