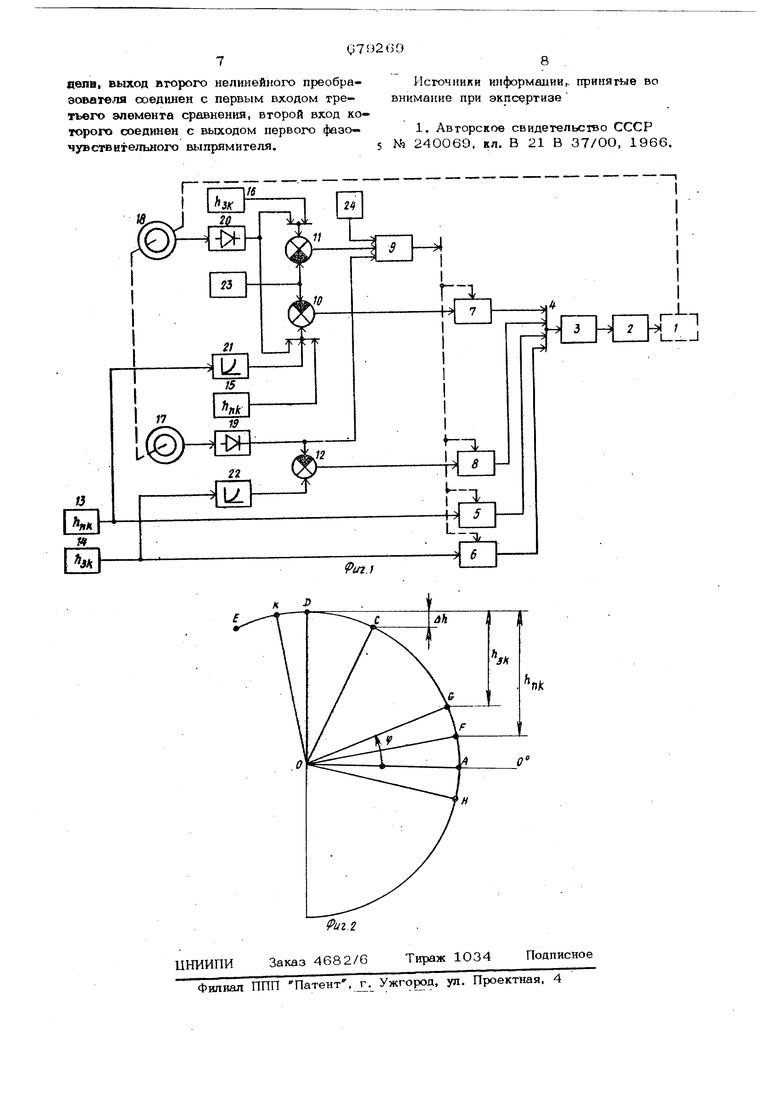
Л5пощего ключа, у которого первый вход связан с выходом вгорого задатчюш скорости и с входом вгорого нелинейного преобразовагеля, выход которого соединен с первьш входом третьего элемента срав- нения, второй вход которого связан с выходом первого фазочувствительного выпря« мителя. На фиг, 1 приведена блок-схема предлагаемого устройства;- на фиг. 2 - диаграмма положений эксцентрика. Эксцентриковый нажимной механизм 1 снабжен приводом 2 и регулятором 3 скорости привода, в задающую цепь 4 которо го через ключевые элементы 5-8, переключаемые блоком 9, и элементы 10-12 (равнения включены первый и второй задатчики 13 и 14 скорости привода, первый и второй задатчики 15 и 16 перемещения нажимного механизма, первый и второй сельсины-датчики 17 и 18 положения нажимного механизма, первый и второй фазочувствительиые выпрямители 19 и 20, первый и второй нелинейные преобразова- тели 21 и 22, блок. 23 смещения и датник 24 положения концатрубы. Положение эксцентрика (см. фиг. 2) характеризуется углом f поворота его радиуса относительно оси ОА, перпендикулярной к оси OD; соединяющей оси враще ния рабочих валков в двухвалковой клетки стана. Исходное положение OD эксцентрика ( Ч 9О ) соответствует максимал ному расстоянию между валками, при кото ром прокатывается средняя часть трубы. При утонении конца трубы и повороте экс центрика из исходного положения на угол 9О°-Ч смещения валка fl Г (1 -sitiM), где Г - радиус эксцентрика, и обуслов.ливает соответствующее утонение стенки трубы. Утонения стенки на переднем и заднем торцах (в общем случае) различны; им соответствуют радиальные смещения Vl . обозначенные точками F и G на фиг. 2. В соответствии с требованиями технологии обжатие концов труб одного типора мера осуществляется при соогветствующе постоянной скорости привода эксцентрика. Разгон привода до заданной скорости перед обжатием переднего конца трубы производится из положений, обозначенных точкой Н . Торможение привода после об жатия переднего конца и разгон привода перед обжатием заднего конца осуществля ются в зоне положений эксцентр1жа, обозначенной дугой CDE.B пределах CDE радиальное смещение валка д 1i несущественно и соответствующее утонение стенки лежит в пределах допуска на толщину стенки. Статор первого сельсина-датчика 17 установлен в положении, обеспечивающем нуль напряжения на выходе выпрямителя 19 в положении эксцентрика, обозначенном точкой С диаграммы. Статор второго сельсина-датчика 18 установлен в положении, обеспечивающем нуль напряжения на выходе выпрямителя 20 в положении эксцентрика, обозначенном точкой А диаграммы. Максимальное выпрямленнре напряжение сельсина-датчика 18 и напряжение на выходе блока 23 смещения равны между собой, поэтому их разность пропорциональна радиальному смещению валка 1l и используется для управления приводом эксцентрика. Устройство работает следующим образом. Перед подходом переднего конца трубы к клети ) с. необходимым упреждением срабатывает датчик 24, по сигналу которого блок 9 открывает ключевой элемент 5 и тем самым подключает первый датчик 13 скорости привода к регулятору 3. Привод 2 разгоняется до заданной задатчиком 13 скорости, поворачивая вал эксцентрика из положения, соответствующего точке Н Диаграммы, против часовой стрелки (назад) с постоянным ускорением. При входе переднего конца трубы в валки привод достигает заданной скорости, а эксцентрик находится в положении, соответствующем точке F диаграммы. При обжатии переднего конца трубы-привод 2 поворачивает эксцентрик с постоянной заданной скоростью из точки F в направлении против часовой стрелки. В положении эксцентрика, соответствующем точке С диаграммы, сигнал выпрямителя 19 на выходе первого сельсинадатчика 17 становится, равным нулю. Это воспринимается блоком 9, который закрыва ет ключевой элемент 5 и открывает ключевой элемент 8. В результате к задающей цепи 4- регулятора 3 вместо задатчика 13 подключается выход элемента 12 сравнения сигналов выпрямителя 19 и нелинейного преобразователя 22, т.е. .устройство из режима регулятора скорости переключается на режим регулятора положения, Заданием регулятору положения является сигнал преобразователя 22, пропорциональный квадрату сигнала задатчика 14, т.е. квадрагу скорости привода при следующем утонении заднего конца грубы и, в конеч ном итоге, пути разгона привода при утонении заднего конца грубы. В результате привод 2 замедляется и останавливает эксцентрик в положении, соответствующем точке К диаграммы. При подходе заднего конца трубы к ,1клети вновь срабатывает датчик 24, по сигналу которого блок 9 закрывает ключевой .элемент 8 и открывает ключевой эле« 6, подключая тем самым к задающей цепи 4 регулятора 3 второй задатЧик 14 скорости. В результате привод 2 раз«гоняется вперед до заданной задатчиком 14 скорости, поворачивая эксцентрик из чIf (Положения, соответствующего точке К дка грагамы, по часовой стрелке с постоянным ускорением. На заданную скорость привод выходит в положении эксцентрика, соответствующем точке С диаграммы, т.е. практически без изменения толщины стенки трубы. После этого привод 2 вращает эксцентрик с постоянной скоростью, поворачивая вал эксцентрика по часовой стрелке к точке G. Толщина стенки трубы при этом уменьшается по требуемому закону и контролируется вкгаоченными встречно на вход блока 9 через элемент 11 сравнения выпрямителем 20 второго сельсина-датчика 18 и блоком 23 смещения. В тог момент, когда радиальное смещение валка становится равным заданному вторым задатчиком 16 радиальному смещению hj (точка G диаграммы), сигнал на выходе элемента 11 сравнения становится равным нулю, блок 9 закрывает ключевой элемент 6 и открьгеает ключевой элемент 7. Б результате задатчик 14 скорости привода отключается от входа регулятора 3, а вместо него на вход регулятора 3 включается элемент 10 сравнения. На входе элемента 1О сравниваются фактическое радиальное смещение от блока 23 и заданное в качестве исходного положение эксцентрика перед обжатием переднего конца следующей трубы. Это положение характеризуется суммой радиального смещения эксцентрика п(Для обжатия переднего конца трубы- и радиального олещения эксцентрика на участке разгона НЛР . Радиальное смещение h пи. задается задагчиком 15, а радиальное смещенне при разгоне, прибл-изн тельно равное дуге HAF, задается нелинейным преобразователем 21, сигнал на выходе которого пропорционален квадрату сигнала задагчика 13 скорости, т.е. порционален дуге HAF (углу HOF), поскольку разгон предусмотрен с постоянным ускорением. В результате сигнал на выходе элемента 10 обеспечивает вращение привода 2 вперед и вала экрцентрика - по часовой стрелке от точки Q в точку Н диаграммы. В точке Н сигнал на выходе элемента 10 становится равным нулю и привод 2 останавливается в положении, заданном в качестве исходного перед обжатием переднего конца следующей трубы. При подходе следующей трубы указанные операции повторяются. Формула изобретения Устройство управления нажив«шым механизмом в клети прокатного стана, со- держащее привод нажиьшого механизма, регулятор скорости привода, включенные в задающую цепь на входе регулятора скорости через ключевые элементы и элементы сравнения задатчик скорости привода, нелинейнь1Й преобразователь,задатчик перемещения нажимного механизма, сельсин-датчик положения нажимного механизма с включенным на его выходе фазочув- ствительным выпрямителем и блок переключения ключевых элементов, отличающееся тем, что, с целью повышения точности регулирования толщины стенок труб при утонении их на концах, оно дополнительно содержит датчик полонсекия конца труб, блок смещения и вторые задатчик скорости, нелинейный преобразователь, задатчик перемещения нажимного механизма, сельсин-датчик положения нажимного механизма, фазочувствпгельный выпpя итeль, причем выход блока смещения с вторым входом первого элемента сравнения и с вторым входом второго элемента сравнения, первый вход которого соединен с первым входом первого элемента сравнения, с выходом второго задатчика перемещения с выходом второго фазочувствительного выпрямителя, вход которого соединен с выходом второго сельсина-датчика, выход вгорого элемента сравнения соединен с вторым входом блока переключения -ключввых элементов, выход которого соединен с вторым входом второго управляющего .ключа, у когорого первый вход соединен с выходом второго аадатчика скорости и входом второго нелинейного преобразователя, выход второго управляющего ключа соединен с четвертьп входом задающей
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления прокаткой труб с утоненными концами | 1976 |
|
SU599870A1 |
| Устройство для регулирования скорости электропривода постоянного тока с двумя двигателями | 1975 |
|
SU550751A2 |
| Устройство управления гидравлическим нажимным механизмом в клети трубопрокатного стана | 1981 |
|
SU997877A1 |
| Устройство для автоматическогоупРАВлЕНия пРОКАТКОй ТРуб СуТОНЕННыМи КОНцАМи | 1978 |
|
SU816596A1 |
| Устройство для автоматического управления прокаткой труб с утоненными концами | 1978 |
|
SU778844A1 |
| Устройство для регулирования натяжения длинномерного материала | 1985 |
|
SU1313795A1 |
| Устройство для стабилизации толщины проката | 1981 |
|
SU1013009A1 |
| Устройство для управления профилированной прокаткой заготовки в прокатной клети толстолистового стана с гидравлическим нажимным устройством | 2022 |
|
RU2786648C1 |
| Устройство для регулирования толщины полосы | 1975 |
|
SU749478A1 |
| Электропривод постоянного тока с двухзонным регулированием скорости валков клети прокатного стана | 1986 |
|
SU1411911A1 |
