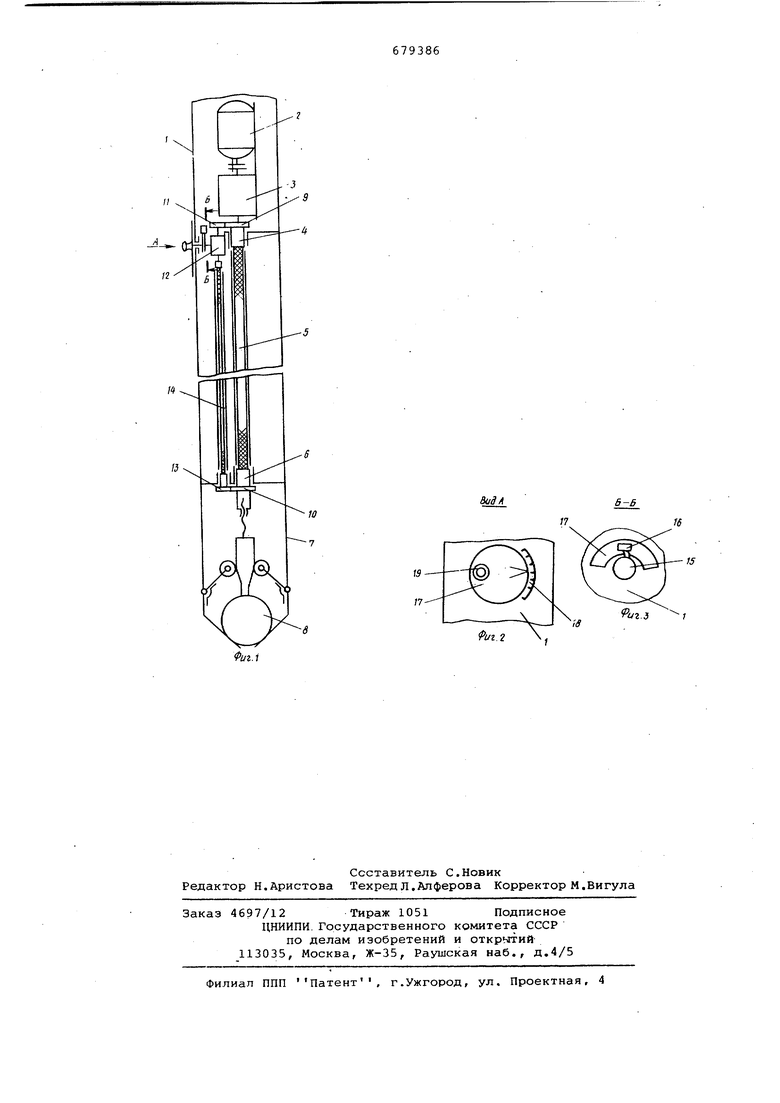
деле дополнительного гибко1о вала 14, другой шпиндель которого соединен с вторым ведущим валом дифференциального редуктора 12. На ведомом валу дифференциального Редуктора смонтирован кулачок 15, воздействующий на датчик торможения, например конечный выключатель 16, смонтированный, на подвижном элементе 17 шкального устройства. Неподвижный элемент 18 шкалььюго устройства установлен на корпусе 1 руки промышленного робота. Подвижный элемент 17 шкального устройства снабжен фиксатором 19.
Привод исполнительного органа промышленного робота работает следующим образом.
При необходимости произвести захват изделия 8 включается приводной двигатель 2, от которого крутящий момент передается через редуктор 3 и гибкий вал 5 ведущему звену исполнительного органа 7. При этом з-ажимные губки исполнительного органа перемещаются в направлении к изделию до соприкосновения с ним. При неподвижных зажимных губках исполнительного органа 7 работающем двигателе 2 увеличивается упругая деформация гибкого вала, и шпиндель 4 начинает вращаться относительно неподвижного шпинделя 6. При одном неподвижном и другом вращающемся ведущих валах дифференциального редуктора . 12 , кинематически связанных со шпинделями 4 и 6, также вращается ведомый вал дифференциального редуктора с кулачком 15 до тех пор, пока не срабатывает конечный выключатель 16, обеспечивающий торможение двигателя.
При необходимости осуществить захват изделия с другим усилием подвижный элемент 17 шкального устройства, соосный с ведомым валом дифференциального редуктора и с кулачком 15, поворачивают в новое положение и фиксируют с помощью фиксатора 19 относительно корпуса руки промышленного робота. Положение подвижного элемента 17 выбирают ч соответствии с показаниями шкального устройства, неподвижная шкала 18 которого проградуирована по усилию зажима изделия.
5 Формула изобретения
1.Привод исполнительного органа промышленного робота, содержащий двигатель, систему управления с дат0 чином торможения, передаточный механизм с упругим звеном высокой податливости и губки, о т л и чающийся тем что, с целью расширения технологических возможностей
5 путем обеспечения регулирования усилия на губках, он снабжен дифференциальным механизмом, концы упругого звена передаточного механизма кинематически связаны с ведущими звеньями дифференциального механизма, а ведомое звено дифференциального механизма снабжено средствами воздействия на датчик торможения, который установлен с возможностью перемещения относительно ведомого вала дифференциального механизма и снабжен средствами фиксации .
2.Привод ПОП.1, oтличaющ и .и с я тем, что упругое звено передаточного механизма выполнено
в виде гибкого вала.
3. привод по п.2, отличающийся тем, что кинематическая связь одного из концов гибкого вала
с ведущим звеном дифференциального механизма содержит дополнительный гибкий вал.
.4. Привод ПОП.1, отлича ю40 щ и и с я тем, что средство воздействия на датчик торможения выполнено в виде кулачка, кинематически связанного с дифференциальным механизмом.
45 Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР №523798, кл. В 25 J 15/00, 1974,
Ut.J 1
Риг.2

| название | год | авторы | номер документа |
|---|---|---|---|
| Гибкая производственная система | 1989 |
|
SU1673397A1 |
| Манипулятор | 1983 |
|
SU1115898A1 |
| Манипулятор | 1983 |
|
SU1151453A1 |
| Стенд для циклических испытаний изделий | 1987 |
|
SU1490577A1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПРЕРЫВИСТОЕ ВРАЩАТЕЛЬНОЕ И ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ | 1999 |
|
RU2180946C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2003 |
|
RU2243882C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2264907C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224638C2 |
| Бурильная машина | 1990 |
|
SU1690552A3 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191108C1 |