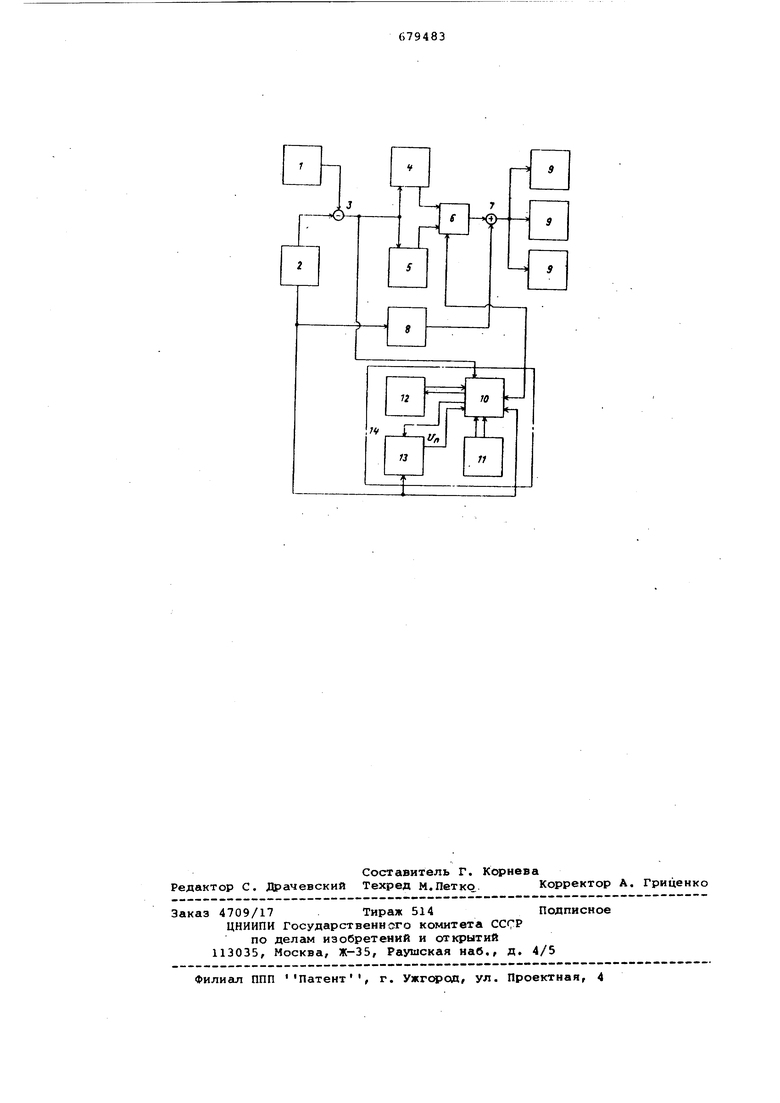
гой вход которого соединен с выходом программного блока 8 мощности. Выход элемента 7 подключен к исполнительным механизмам 9 двигателей. Бло 8 своим входом подключен к выходу эа датчика 2. В состав системы входят также блок 10 сравнения и подключенные к нему блок 11 задания уставок и блок 12временной задержки, а также блок 13памяти, соединенный своими входа ми соответственно с задатчиком 2 и .блоком 10, а выходом - с синим из входов блока 10. Блоки 10, 11, 12 и 13 составляют блок 14 формирования последовательности включения регуля торов 4 и 5. Система работает следуюидим образом. Управление устройством б, обеспе чивающим подключение к исполнительным механизмам 9 двигателей регулят ров 4 и 5 скорости, осуществляется блоком 10, являющимся выходным касkaдoм блока 14. При превышении абсолютной разности между сигналом те кущего значения задания скорости . (V-j), и его исходным значением (Vy,) зафиксированным в блоке 13 памяти наперёд заданной величины (f,) установленной в блоке 11, блок 10 B;ipa6aTHBaeT сигнал на подключение быстродействующего регулятора, например 4 скорости хода судна, к эле менту 7. То есть, при тема работает в режиме отработки ра согласований с большой скоростью исполнительных механизмов 9. Отключение быстродействующего регулятора одновременным включением медленнодействующего происходит по сигнсшу блока 10 при уменьшении сигнала рас согласования между заданной и фактической скоростями хода () до другой заданной величины С , также установленной в блоке 11, т.е. при УЗ , работа системы идет в режима, отработки рассогласований с малой скоростью исполнительных механизмов 9 . Таким образом, подключение быстродействующего регулятора происходит при изменении сигнала задания., а подключение медленнодействующего по сигналу, вырабатываемому, когда эз.панная и фактическая скорости ход Судна близки между собой, т.е. Vj- Уф е.. При кратковременном перерегулировании по скорости хода в переходном процессе, когда продолжительнос Рассогласования УЗ- меньше уставки блока 12 временной задержки блок 10 будет заблокирован ;.: блока 12 и не выдает сигнал на пере ключение с быстродействующего регулятора на медленнодействующий. При выполнении условия УЗ V.4S то обратному каналу между блоками J-0 и 13 в блок 13 памяти подается команда на запоминание текущего значения задания скорости, которое становится исходным значением (VH) для последующего маневра. При изменении задания, когда окажется УЗ- .по обратному каналу из блока 10 в блок и приходит сигнал на стирание памйти. Этот сигнал проходит одновременно с переключением на быстродействующий регулятор. При выполнении условия Уф Сблоком 10 вырабатывается сигнал, поступающий в блок 12 временной задержки, который формирует сигнал на выходе через заданное время. Как только сигнал на его входе снимается, выходной сигнал также снимается. Т. е. этот блок представляет собой звено чистого запаздывания по переднему фронту. Система может быть реализована на базе электрических, пневматичес-. ких или гидравлических элементов. Ее использование позволит исключить колебания приводов двигателей на волнении, а следовательно и параметров двигателя, увеличить ресурс двигателя и установки. При этом компенсация внешних возмущений (например, при воздействии волновых и ветровых возмущений) в процессе поддержания заданной скорости хода судна будет происходить за счет медленнодействующего канала регулятора скорости, не вызывая колебаний параметров двигателя . Формула изобретения Система управления судовой многодвигательной установкой, содержащая датчик и задатчик скорости хода судна, подключенные ко входам элемента определения рассогласования, выход которого подключен к медленнодействующему и быстродействующему регуляторам, связанным через устройство переключения регуляторов с исполнительными механизмами двигателей, про граммный блок задания мощности, блок сравнения и блок задания уставок, отличающаяся тем, что, ; с целью повышения ресурса двигате.лей, сна снабжена связанным с блоком сравнения блоком временной задержки и блоком памяти, подключенным своим входом в задатчику скорое- ти хода судна, а выходом - к одноМУКЗ входов блока сравнения, выход которого соединен с управляющим входом устройства переключения регулято.ров. Источники информации, принятые во внимание при экспертизе i. Авторское свидетельство СССР № 471246, кл. В 63 Н 2.1/22, 10.02,77.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления судовой многодвигательной установкой | 1980 |
|
SU965899A1 |
| Устройство для управления энергетическим объектом | 1977 |
|
SU652038A1 |
| Устройство для регулирования многовальной судовой энергетической установки | 1978 |
|
SU749731A1 |
| Цифровой следящий электропривод | 1985 |
|
SU1308982A1 |
| Устройство для управления водоснабжением участка гидрошахты | 1982 |
|
SU1115020A1 |
| Система управления главным двигателем судна | 1972 |
|
SU471246A1 |
| Система управления судовым главнымдВигАТЕлЕМ и ВиНТОМ РЕгулиРуЕМОгОшАгА | 1979 |
|
SU844479A2 |
| Система управления судовым главным двигателем и винтом регулируемого шага | 1975 |
|
SU575268A1 |
| Система регулирования частоты вращения турбины | 1976 |
|
SU691582A1 |
| Система дистанционного автоматизированного управления судовой газореверсивной газотурбинной установкой | 1980 |
|
SU899386A2 |