Изобретение относится к области автоматики и может быть использовано для автоматического и дистанционного управления двухрук авными формовочными пескометами в литейном производстве.
Известны устройства для управления двухрукавными формовочными пескометами 1 и 2 .
Из известных устройств для управления двухрукавными формовочньп.1И пескометами наиболее близким по технической сущности является устройство, содержащее источники переменного напряжения, фазочувствительные выпрямители, делители напряжения, синусно-косинусные вра1цаю диеся трансформатора, ротор первого из которых механически соединен с органом управления, а обмотка статора через первый делитель напряжения с первым источником переменного напряжения, первая и вторая обмотка ротора через последовательно соединенные фазочувствительныйвыпрямитель, интегратор, элемент сравнения и усилитель соединены соответственно с первым и вторым приводами, которые механически соединены соответственно с больишм и малым рукавами пескомета 3.
Недостатки данного устройства заключаются в том, что оно не обеспечивает основного технологического требования к пескометной формовке постоянство линейной скорости перемещения метательной голонки, поскольку в этом случае скорость метатель0ной головки задается скоростью перемещения руки оператора, т.е. полностью определяется его субъективными свойствами (утомляемостью, сосредоточенностью, сознательностью
5 и др.). Известное устройство управления в самой своей основе содержит предпосылки для быстрой утомляемости оператора, поскольку его рука повторяет все движения метательной го0ловки. Кроме того, задат Ик координат имитатора рукавов пескомета конструктивно сложен.
Цель изобретения - упрощение и повышение надежности устройства.
5
Поставленная цель достигается тем, что в известном устройстве .управления двухрукавным формовочным пескометом, статор второго синусно-косинусного вращающегося
трансформатора закреплен неподвижно ротор второго и статор третьего синусно-косинусных вращающихся трансформаторов механически соединены с большим рукавом пескомета, ротор третьего синусно-косинусного вращающегося трансформатора механически соединен с малым рукавом пескомета, обмотка статора второго синусно-косинусного вращающегося трансформатора подключена ко второму источнику переменного напряжения, Нервая и вторая o6MotKH статора третьего синусно-косинусного вращающегося трансформатора соединены соответственно через второй и третий делители напряжения с первыми входами третьего и четвертого фаэочувствительных выпрямителей, вторые входы которых соединены соответственно с первыми выводами первых и вторых обмоток роторов второго и третьего синусно-косинусных вращающихся трансформаторов, вторые которых . подключены к первым вь водс1м первой и второй обмоток статора третьего си«усно-косинусного вращающегося трансформатора, а выходы третьего и четвертого фазочувствительных выпрямителей - ко вторым входам первого и второго элементов сравнения.
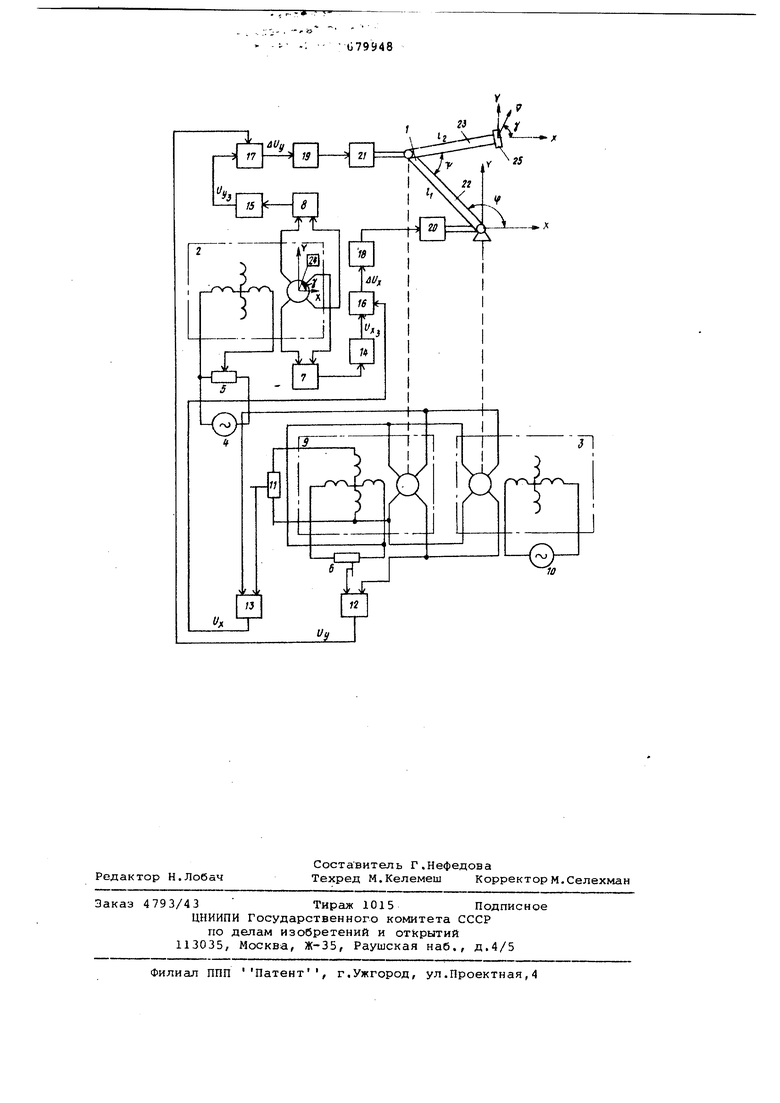
На чертеже представлена функциональная схема устройства для управления двухрукавньам формовочным пескометом.
Устройство содержит двухрукавный формовочный пескомет 1, первый и второй синусно-косинусные вращающиеся трансформаторы 2 и 3, первый источник 4 переменного напряжения , первый и второй делители напряжения 5 и 6, первый и второй фазочувствительные выпрягиители 7 и 8, третий синусно-косинусный вращающийся трансформатор 9, второй источник 10 переменного напряжения, третий делитель напряжения 11, третий и четвертый фазочувс твительные выпрямители 12 и 13, первый и второй интеграторы 14 и 15, первый и второй элементы сравнения 16 и 17, первый и второй усилители 18 и 19, первый и второй приводы 20 и 21, большой и малый рукава 22 я 23 пескомета, орган управления 24 и метательную головку 25 пескомета.
В осях вращения большого и малого рукавов 22и 23 пескомета 1 закрей.лены синусно-косинусные вращающиеся трансформатОЕИ 3 и 9 таким образом, что статор трансформатора 3 неподвижен, а его ротор скреплен с большим рукавом 22 пескомета 1. Статор трансформатора 9 скреплен с болыиим рукавом 22 пескомета 1, а ротор с малым рукавом 23 пескомета 1. Одна из статорных обмоток трансформатора 3 подключена ко второму источнику 10 переменного напряжения. Роторные обмотки трансформаторов 3 и 9 попарно соединены между собой. Статорные обмотки трансформатора 9 через второй и третий делители напряжения б и 11 подключены к третьему и четвертому фазочувствительным выпрямител ям 12 и 13, другие входы которых соединены с соответствующими роторными обмотками трансформаторов
0 3 и 9.
Задатчик выполнен на базе первого синусно-косинусного вращающегося трансформатора 2. Одна из его статорных обмоток подключена к первслиу источнику 4 переменного напряжения через первый делитель напряжения 5.
Статор трансформатора 2 закреплен йеподвижно, а ротор его, соединенный с органом управления 24, может свободно вращаться относительно своей
0 оси. Роторные обмотки трансформатора 2 подключены соответственно на входы фазочувствительных выпрямителей 7 и 8, подключенных к первому и второму интеграторам 14 и 15.
5 Выходы первого и второго интеграторов 14 и 15, и фазочувствительных выпрямителей 7 и 8 подключены соответственно к первому и второму элементам сравнения 16 и 17. Послед0 нйе через первый и второй усилители 18 и 19 связаны соответственно с силовыми первым и вторым приводами 0 и 21 большого и малого рукавов 22 и 23 пескомета 1.
5 Работает устройство управления следующим образом.
Часть напряжения, снимаемого со второго делителя напряжения 6, алгебраически складывается с напряжением соответствующей роторной обмотки второго синусно-косинусного вращгиощегося трансформатора 3 и подается на третий Фазочувствительный выпрямитель 12. Часть напряжения с третьего делителя напряжения
11 алгебраически складывается с напряжением соответствующей роторной обмотки третьего синусно-косинусHOrtJ вращающегося трансформатора 9 и подается на фазочувствительный
0 выпрямитель 13. Выходные сигналы третьего и четвертого фазочувствительных выпрямителей 12 и 13 пропорциональны текущим значениям декартовых координат метательной
5 головки 25 пескомета 1, так как описанная вьше схема включения ВТОРОГО и третьего синусно-косинусных вращающихся трансформаторов 3 и 9 и третьего и четвертого фазочувствительных выпрямителей 12 и 13 обеспечивает автоматическое решение уравнений:
п
Uj кх ке рсовЧ-«--рсо5() U,,--Kd--Ke sih4- -Sin(MiH-4), где U, U - BfctxoflHfcue напряжения соответственно третьего и четвертого фазочувствительных выпрямителей 12 и 13; X, у, - декартовы координаты метательной головки 25 пескомета 1; f , f 2 - длина большого 22 и малого 23 рукавов пескомета 1 Ч, Н - угловые, координаты поворота большого 22 и малого 23 рукавов пескомета 1; К - коэффициент пересчета. При помощи второго и третьего делителей напряжения б и 11 устанав ливается заданное отношение длин рукавов f2. Величина напряжения второго источника 10 переменного на пряжения определяет значение коэффи циента пересчета К, Выходные напряжения U и U первого и второго интеграторов 14 и 15 пропорциональны заданньом значениям декартовых координат метательной головки 25 пескомета 1 и соответствуют ее перемещению с постоянной линейной скоростью в направлени под углом ТГ ° г выбранной дл задатчика - ротора первого синуснокосинусного вращающегося трансформатора 2, Метательная головка 25 пескомета 1 под воздействием сигналов задания и Uy, будет переме щаться с постоянной скоростью V в направлении под углом к оси X, т.е. направление перемещения метательной головки 25 будет скоординир вано с положением органа управлени 24. Использование изобретения позвол ет уменьшить брак литейных форм и отливок в связи с повышением качест ва формовки, являющегося следствием автоматического поддержания постоя ства линейной скорости метательной головки пескомета на заданном уров снизить износ механизмов пескомета в связи с переходом на режим плавного регулирования. Формула изобретения Устройство для управления двухрукавным формовочным пескометом, содержащее источники переменного напряжения, фазочувствительные випрямители, делители напряжения, синусно-косинусные вращающиеся трансформаторы, ротор первого из которых механически соединен с органом управления, а обмотка статора через первый делитель напряжения с первым источником переменного напряжения, первая и вторая обмотки ротора через последовательно соединенные фазочувствительный выпрямитель, интегратор, элемент сравнения и усилитель соединены соответственно с первым и вторим приводами, которые механически соединены соответственно с большим и малым рукавами пескомета, отличающеес я тем, что с целью упрощения и повышения надежности устройства, в нем статор второго синусно-косинусного вращающегося тр ансформатора закреплен неподвижно, ротор второго и статор третьего синусно-косинусных вращающихся трансформаторов механически соединены с большим рукавом пескомета, ротор третьего синуснокосинусного вращающегося трансформатора механически соединен с малым рукавом пескомета, обмотка статора второго синусно-косинусного вращающегося трансформатора подключена ко второму источнику переменного напряжения,, первая и вторая обмотки статора третьего синусно-косинусного вращающегося трансформатора соединены соответственно через второй и третий делители напряжения с первыгли входами третьего и четвертого фазочувствительных выпрямителей, вторые ВХОДЫ которых соединены соответственно с первыми выводами первых и BTojxjx обмоток роторов второго и третьего синусно-косинусных вращающихся трансформаторов, вторые выводы которых подключены к первым выводам первой и второй обмоток статора третьего синусно-косинусного вращающегося трансформатора, а выходы третьего и четвертого фазочувствительных выпрямителей - ко вторым входам первого и второго элементов сравнения. Источники информации,: принятые во внимание при экспертизе 1.Авторское свидетельство СССР 222201, кл. С- 08 С 9/04, 1966. 2.ПатентСША № 2212510, кл. 22 - 36, 1937. 3.Литейное производство , 9, 1970, с.22-25.
10
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1990 |
|
SU1791953A1 |
| Бесконтактный регулируемый электропривод | 1982 |
|
SU1075344A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ПРОИЗВОДИТЕЛЬНОСТИ РОТОРНОГО ЭКСКАВАТОРА | 1970 |
|
SU288339A1 |
| Устройство для формирования сигнала рассогласования | 1985 |
|
SU1277064A1 |
| Вентильный электропривод | 1987 |
|
SU1635243A1 |
| Вентильный электропривод | 1988 |
|
SU1510060A1 |
| Преобразователь угла поворота вала в код | 1980 |
|
SU866570A1 |
| Вентильный электропривод | 1988 |
|
SU1713072A1 |
| Вентильный электропривод | 1986 |
|
SU1319221A1 |
| Вентильный электропривод | 1987 |
|
SU1480084A1 |