Уст1 м1етва, обеспечквшощив автоматическоэ 113М1И1ение угла установки лопастей еликоптера шд действием рзиостш аародизтампческих сил, действующих па допатн, для уничтолсения момента, креяящсГС геликоптер па бок, уж& известны. вязь между лопастями, поворотными вдоль осей, осуществляется так, что, ирл умеп)Hieiiiffl угла устя.новкп одной лопалти, другая-увеличивает свой уго-л. В описываемом устройство, для иамопеиил ередлсго угЛа установки лопастей, связь между шши выполпеяа в виде лирнириого параллелограмма, который допускает гамсеение своих углов ггутвм персстАповкв одпого из i-j eMenTOB параллелограмма вдоль оси Bi щенпя ротора геликоптера.
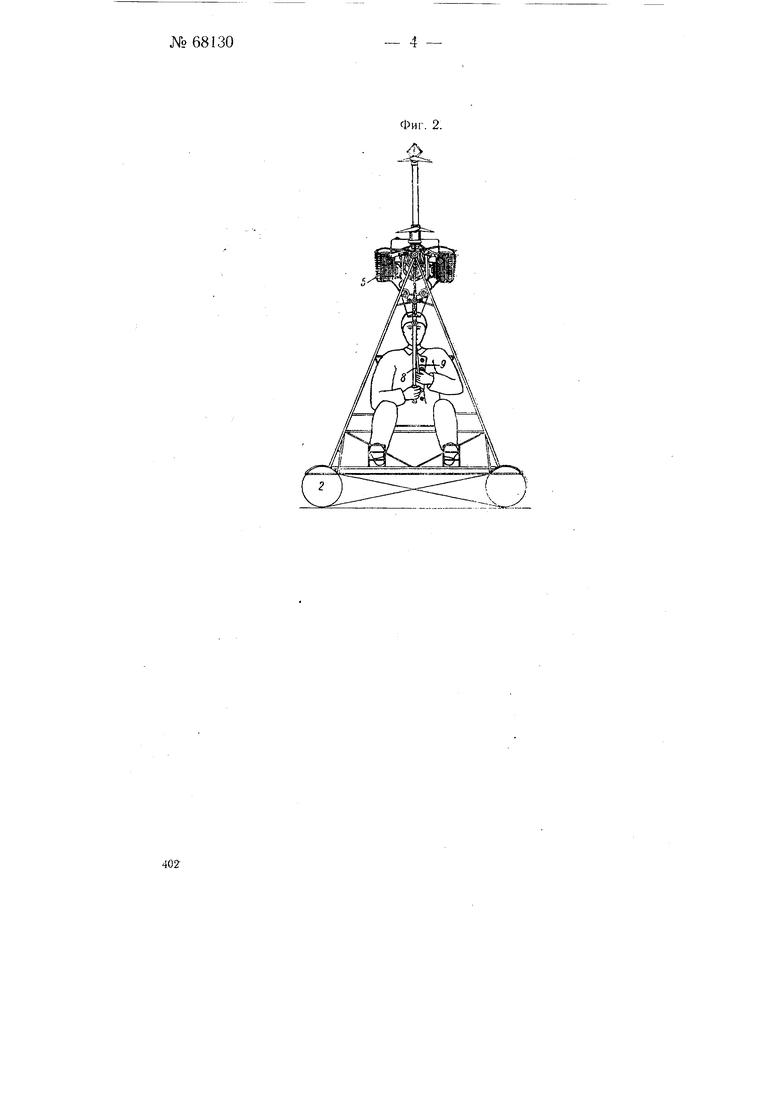
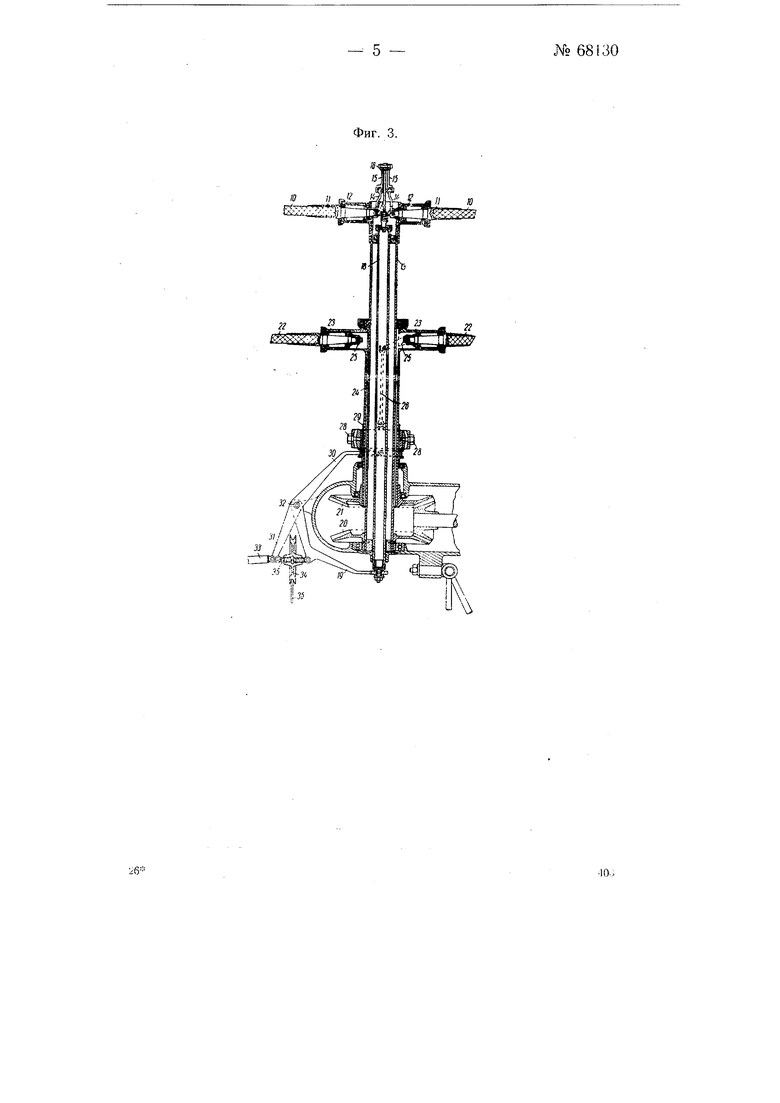
Па чертеясо фиг. 1 изображает вид «5оь:у одноместпог) геликоитсра с устройством, фиг. 2 - :шд тга гсдпЕоптер спереди; фиг. 3 - осевой разрез устройства, для лорЛрота лйпастей телпкотгтбра 01коло ик продольиых осей, фиг. 4 - б.оковой -вид устройства.
Геликоптер, изображенный па фпт. 1 и 2, снабжен пиразгадалыюй трубчатой фермой 1, тготорая опирается иа два баллона 2. выполняющих роль посадочных элементов. Иа ферме 1 закр€.пд1еяо сидеияе 3, па втором аомещаэтея пилот. В верхвей части фермы па дгвух резиновы,х деипферах и шарБщрах 4 молтпровала виптомоторпая Т)уш13, сокто щая т .MOTOipa 5, муфты
св1)бодно1ч хода, ауфты сцэиленля, редуктора 6 ю двух сжюных несущих BITHTOOJ 7, кр торые вращаются , проггивоположиыо
CTOpOinbl.
Для управления юеликоптером вся винтомоторная группа может поворачива.ться около шарни| в 4 посредством рукоятки; 8. Иа этой рукоятке м гатироваиа вторая рукоятка 9, при перемещ&пии которой производится одповрбменпый или дифереппиальпый повОрот лопастей н «ущих вшпОВ.
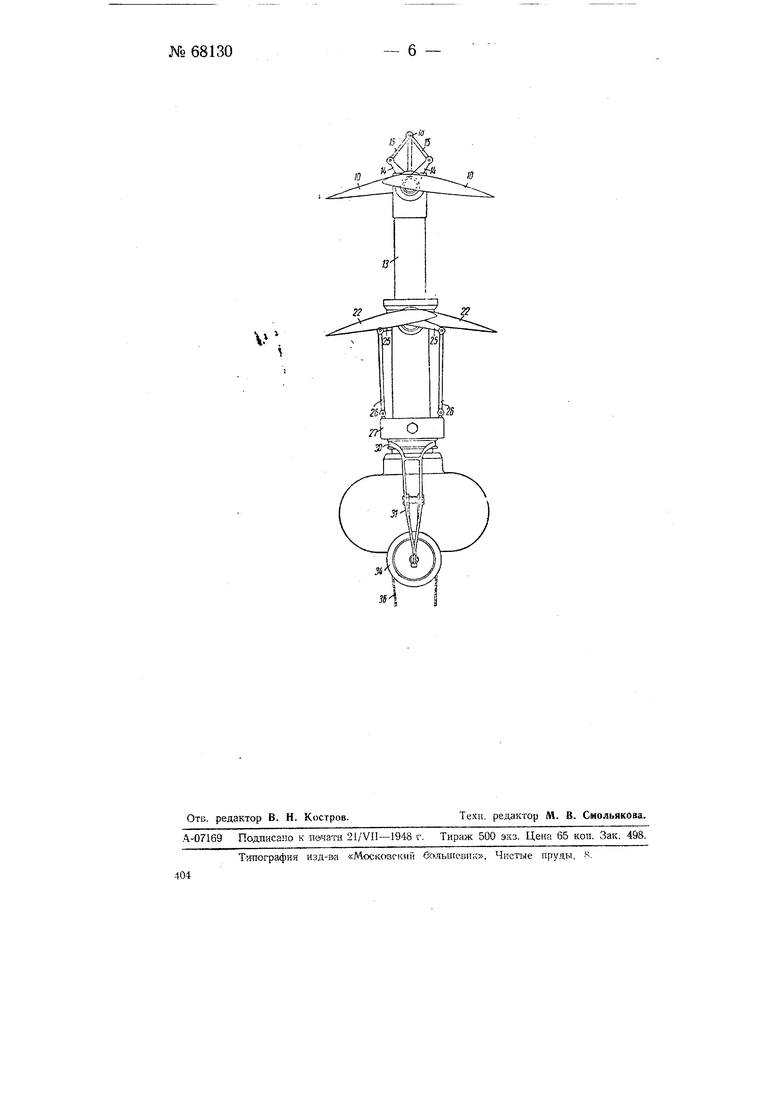
Лопасти 10 верхнего винта (фиг. 3 ц 4) зак.р€плены в комлевых частях 11, поворотпо моптироваяных во втулках 12, пкреплепных с нольга верт1 кал1лым валом 13. т«ш1Й К.ОП6П которого соедттеп с пюстерпей 20 редуктора мотара. На. копды частей 11 надеты рычаги 14, кмщы которых соедпнепы между собой двумя тягдми 15, образующим пкцяшрпый пара.1Л( лограмм. В полете, иод действием разности момоптОВ аэродинамическ;1х стгл, лоиастй 10 занимают разлипгые- угловые нол(1;кения, совершая колебательной движешо вокруг своей продольной ОСи, около среднего положения, определяемого ВК1Ичг 11ами углов параллелограмма.. Для з змене ш.я среднего положения лопастей 10, нтарнир 16, соедтшяющнй тяги 15, вынолнен переставным вдоль вер тикалмюй оси ноп адствм штапг 17 и 18, которые шарнптно соединены между собой нримерн па уровне продольной лсл . Ии.жниГ; коД9иец штангя 18 сочледеи с вшпоой рычага 19 упрамениЯ. Лоласет 22 иижнего виитл также поворотно монтированы в втулках 23 вертикального вала 24, связанного с шестерней 21 редуктора. Комлевый части лопастей несут рычаги 25, которые тягами 26 ссёдиноны с кольцом 27. Это глльцо имеет возможность поворачиваться около диаметрально расположенных цапф 28 относительмо втулки 39, овободао сндящей иа валу 24. В полете эти лопасти так же, как лопасти верхнего вивта, совершают колебательное движение около своих продольных «сей ОТ НОСИТСДЬБО среднего иоложения, для иеменепия которого втулка, 29, посредство1г рычагов 30, вьшолнеиа переставной ваоль «ала 24.
Рычаги 19 а 30 иоворотно моитиаюваиы на общей оси 32, за1креиле1нной в кронштейне корнуса р€|дуктора мотора.
Рычаг 30 снабжен вторьш цлечом 31, конец которого ирисоединеа Е тяге 33, идущей к рукоятке 8 управления. Между плечОЯ-31 л рьгаа-гои 19 установлен шкпв 34, втулка которого, посредством правой и левой резьбы, С)ч.тоне1на с иальцами 35, которые шариирио соединены с концом 31 и рычагом 19. Шкив тросом 3( связаи с рукояткой 9. При продольном перемещении рукоятки 8 .тяга. 33 вызывает пошрот обоих рыча,гоБ 30 и 19 в Одну CTOipOHT,% что создаем поворот лопастай верхнего и нижнего винта в разные сто1роны. При лоиеречвом перемещении рукоятки 9 поворачивается шкив 34, что вызывает поворот рыча-го-в 19 и 30 в разные сто.роны. Лопастп верхнего и нижнего В1шта окажутся яоворпутьши в одну сгорону иа увеличение или уменьшение угла устаоаовки, в зависимости от наиравления зращеашя шкива 34, оцределяемого налравл8пие5 перемещения рукоятки 9 Т1равл.ния
Продмат изобретения
Уст1шство для поворота лопаютей геликоптера ОКоло их иродольиых юсей, к аковые лопасти связаны между собой таашс образом, что урааповешавание азродкнааичсских сил, действующих на лонастй, обеспечивается автоматически, о т л и ч а 10 щ ie е с я тем, что, для возможности иэ-мененш среднего угла установки лонаегей, связь между ними вьшолнена в виде шарцприого иаражклограшма, доп чсиагощего изменение его углов.
2.Форма выполнепия устройства ио а. 1, отличающаяся тем, что шлраллЕлограмм ссставлеи ю рычагов 14,14 лопастей и тяг 15,15, соединенных можд.у собой посредством шарпира, 16, не1Лставнопо вдоль оси ротора.
3.Рорма вьшолнения устройства по II. 2, отличающаяся тем, что для лересталоБКи шарнира 16 иримеяеиа тяга, составленная из двух элементов 17 и 18, соединенных между собой посредством шарнира, распояожеНного ириолизитеаьн на оси лопастей, и нижним концом соединенная с органом унравлшия.
4.Форма вьшолнения устройства но jr. 1, отличающаяся тем, что иарадлелограММ ссставлен из рычагов 25,25 лонастей и из стержней 26,26, знарнжрносоединенных с охватывающим вал ротора кольцом 27, имеющим возмОжность свободного колеюания около горизопталнаой оси и щшнуднтельпого иерелгещеШЯ вдоль вала.
5.Форма вынолншия устройетаа во и. 4, отличающаяся тем, что К1ольцо 27 монтировано посредством двух диаметрально расположенных цаиф на втулке29, нефеставнои вдоль вала под действие оргапа управления.
iW
.Xtjiv:
It лГ((;;.
г.-у«);о;-;:
Фиг. 3.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ротор геликоптера | 1946 |
|
SU70844A1 |
| Ротор геликоптера | 1946 |
|
SU83999A1 |
| Автомат перекоса лопастей несущего винта геликоптера | 1945 |
|
SU67253A1 |
| Ротор геликоптера | 1948 |
|
SU85130A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ СОЧЛЕНЕНИЙ РУКАВОВ ВТУЛКИ С КОРПУСОМ ВТУЛКИ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2022 |
|
RU2795551C1 |
| Соосный несущий винт винтокрылого летательного аппарата | 2021 |
|
RU2756861C1 |
| АВТОМАТ ПЕРЕКОСА ВЕРТОЛЕТА | 2019 |
|
RU2728945C1 |
| СТЕНД ДЛЯ ИЗНОСНЫХ ИСПЫТАНИЙ АВТОМАТА ПЕРЕКОСА ВЕРТОЛЕТА | 2019 |
|
RU2728216C1 |
| Лопасть воздушного винта многоконтурной конструкции | 2021 |
|
RU2767574C1 |
| Машина для разравнивания бетона | 1973 |
|
SU631080A3 |
.,ii::l---eiff -- :
V
