(54) АДАПТИВНЫЙ СЛЕДЯЩИЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный следящий привод постоян-НОгО TOKA | 1979 |
|
SU853606A1 |
| Нелинейное корректирующее устройство | 1982 |
|
SU1023275A1 |
| СЛЕДЯЩИЙ РУЛЕВОЙ ЭЛЕКТРОПРИВОД | 2024 |
|
RU2832922C1 |
| СПОСОБ АДАПТИВНОЙ АНТИРЕЗОНАНСНОЙ КОРРЕКЦИИ НЕСТАБИЛЬНЫХ ЧАСТОТНЫХ ХАРАКТЕРИСТИК КОЛЕБАТЕЛЬНОГО ОБЪЕКТА УПРАВЛЕНИЯ И САМОНАСТРАИВАЮЩАЯСЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2174252C1 |
| Следящий привод | 1977 |
|
SU857924A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2016 |
|
RU2616219C1 |
| Следящая система | 1978 |
|
SU746408A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 2003 |
|
RU2252435C2 |
| Следящая система | 1979 |
|
SU788076A1 |
| Следящая система | 1975 |
|
SU550617A1 |
1
Адаптивный следящий привод предназначен для использования в системах управления/ характериэуекых высокими требованиями к динамическим характеристикам управления и нстационарностью коэффициентов передачи .
Известны следящие привода, содежащие измеритель рассогласования, блок деления, блок умножения, блок формирования сигнала управления, согласующие преобразователи и исполнительный двигатель, повышение точности которых достигается за счет введения замкнутых контуров самонастройки, изменяющих коэффицирнт передачи контура управления .
Наиболее близким по технической сущности к предлагаемому является привод, содержащий последовательно соединенные першлй блок сравнения и блок деления, последовательно соединенные корректирующий блок, первый блок выделения модуля и первый блок памяти, последовательн соединенные блок фор и«рования сигнала управления, второй блок сравнения, регулятор тока, и тиристорный преобразователь, выход которого соединен со вторым входом второго. блока сравнения и входом исполнительного двигателя,который подключен к одному из входов первого блока сравнения и входу блока дифференцирования, выход которого через последовательно соединенные второй блок выделения модуля и второй блок памяти
0 подключен ко второму входу блока деления, вход корректирующего бло. ка соединен с входом блока формирования сигнала управления 4,
5
Однако точность этого привода изменяет его коэффициент передачи, что снижает быстродействие устройства.
20
Цель изобретения - повышение точности привода
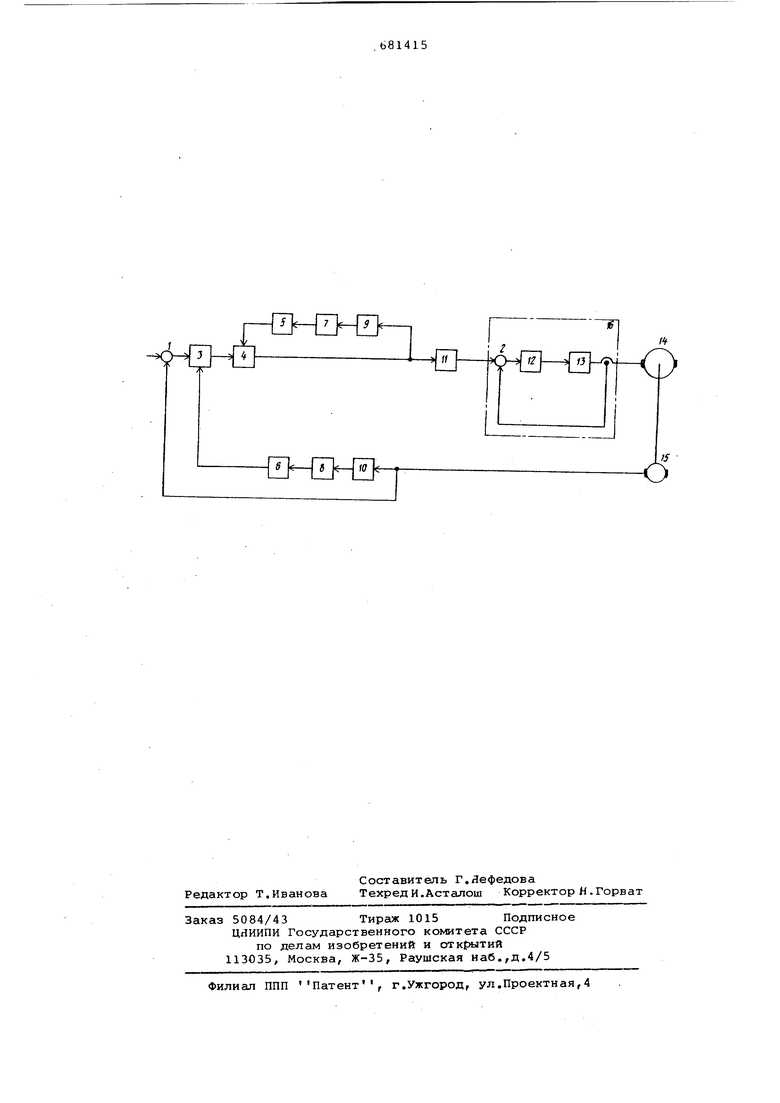
Поставленная цель достигается 25 тем, что в приводе установлен блок умножения, первый вход которого под ключей к выходу блока деления, второй - к выходу первого блока памяти, а выход - к входу блока 30 форлирования сигнала управления. На чертеже изображена структурная схема предлагаемого привода. Привод содержит первый 1 и второ 2 блоки сравнения, блок деления 3, блок умножения 4, первый 5 и второй 6 блоки памяти, первый 7 и второй 8 блоки выделения модуля, корректируюц лй блок 9, блок диффг ренцирования Ю, блок формирования сигнала управления 11, регулятор тока 12, тиристорный преобразователь 13 исполнительный двигатель 14, тахогенератор 15 и контур регулировани тока 16. Привод работает следующим образом.
Выходной сигнал тахогенератора поступает на вход элемента сравнения 1, в котором сравнивается с сигналом задания.
Здесь формируется сигнал рассогласования . Выходной сигнал тахогенератора 15 поступает также на вход дифференциатора 10, в котором определяется производная от скорости вращения ш исполнительного двигателя 14. В блоке модуля 8 определяется модуль производной скорости вращения ш . В блоке паьмяти 6 запоминается максимальное значение прризводной скорости вращения ,к.сВремя запоминания зависит от объект регулирования и выбирается близким к времени переходного процесса при максимальном изменении выходной координаты. В блоке деления 3 осуществляется деление сигнала рассогласования 6 на модуль максимального значен ия производной скорости вращенияС4).ВыходноЙ сигнал блока деления 6, пропорциональный /iL К.С/ поступает на вход блока умножения 4, с выхода которого он подается на входы блока 11 форми.рования сигнала управления и блока коррекции 9. Последний представляет собсй элемент запаздывания, реализованный с помощью фильтра первого порядка, и обеспечивает сдвиг сигнала на входе блока7 выделения модуля относительно сигнала на входе 11, Указанный фильтр настраиваатся так, чтобы его характеристики в возможно большей области часто совпадали с динамическими характеритиками замкнутого контура регулирования тока 16, В блоке 7 выделяется мод;Ль выходного сигнала коррекцирующего блока 9, а в блоке памяти 5 зaпo в нaeтcя его максимальное значение , -Время запоминания зависит от объекта регулирования и выбирается близким по времени переходного процесса при максимальФормула изобретения
Адаптивный следящий привод,содержащий последовательно соединенные первый блок сравнения и блок деления, последовательно соединенные корректирующий блок, первый блок
выделения модуля и первый блок
памяти, последовательно соединенные блок формирования сигнала управления, второй блок сравнения, регулятор тока, и тиристорный преобразователь, выход которого соединен со вторым входом второго блока сравнения и входом исполнительного двигателя, который подключен к од-. ному из входов первого блока сравнения и входу блока дифференцирования, выход которого через последовательно соединенные второй блок выделения модуля и второй блок Памяти подключен ко второму входу блока деления, вход корректирующе0 го блока соединен с входом блока формирования сигнала управления, отличающий ся тем, что, с целью повьлиения точности, в нем установлен блок умножения, первый
5 вход которого подключен к выходу блока деления, второй - к выходу первого блока памяти, а выход к входу блока формирования сигнгша управления.
QИсточники информации, принятые
во внимание при экспертизе
2,Авторское свидетельство СССР 164636 G 05 В 5/00, 18,07.63.
3,Авторское свидетельство СССР 439222 G 05 В 13/02, 18JL2.71. 04. Авторское свидетельство СССР
465620 G 05 В 11/01, 24JD773. прототип. ном изменении выходной координаты. Подстраивае1.1ый коэффициент передачи привода прямо пропорционален максимальному значению выходного сигнала корректирующего блока и обратно пропорционален максимальному значению производной скорости изменения выходного сигнала привода, а общий коэффициент передачи по прямому каналу замкнутой системы, в которой применяется предлагаемой привод, остается неизменным. Использование изобретения позволит повысить точность регулирования в два с половиной раза за счет повышения степени его адаптации к изменению параметров.
341
ZJ-fgi -w
1
- f
n /3 P
ts
О
