I
Изобретение относится к области станкостроения и может быть использовано в балансировочной технике.
Известно устройство для балансировки деталей, содержащее основание, размещенные на нем вертикальный шпиндель, соединенную с ним оправку для установки деталей и привод вращения щпинделя I. В процессе вращения детали измеряют параметры неуравновещенности, величину показывает стрелочный прибор, связанный с деталью, после чего останавливают вращение детали и неуравновещенность переносят на деталь.
Недостатком устройства является низкая производительность процесса балансировки из-за необходимости останова детали для нанесения на нее величины и фазы неуравновещенности.
Наиболее близким по технической сущности к изобретению является устройство для балансировки деталей, содержащее основание, размещенные на нем шпиндель, соединенную с носледним оправку для установки деталей, привод вращения шпинделя и механизм разложения вектора неуравновещенности на составляющие по осям координат 2. Механизм разложения в устройстве выполнен в виде стрелочного указателя, электрически связанного со шпинделем.
Для отыскания неуравновешенного места на детали последнюю после остановки проворачивают вместе со щпкнделем от руки, при этом одна из стрелок указателя отслеживает этю движение, что исключает операцию считывания угловой величины и последующего переноса ее на остановленную деталь.
При совмещении этой стрелки со второй стрелкой, показывающей измеренную в процессе вращения детали величину фазы, неуравнощенное место детали расположится в определенной точке, например против устройства для устранения неуравновешенности.
При балансировке деталей, имеющих выступающие равномерно расположенные участки прерывистюй поверхности, например, типа крыльчаток вентиляторов, возникает необходимость разложить вектор неуравновещенности на два вектора по заданным координатным осям. Для этого на экран указателя неуравновешенности надевают сменную прозрачную шкалу с сеткой, образующую требуемую систему координат, а одна из стрелок прибора снабжена щкалой, соответствующей шкале указателя величины неуравновещенности. Оператор замечает нужное деление на стрелке и, пользуясь координатной сеткой, визуально раскладывает вектор на составляющие.
Такая работа связана с необходимостью постоянно напрягать внимание и зрение. Кроме того, результат разложения необходимо запомнить или записать, так как при подведении детали неуравновешенным местом к исправляющему устройству стрелка указателя также смещается, и для повторного прочтения результата необходимо вернуться в первоначальное положение и повторить операнию разложения, что сннжает производительность процесса прл балансировке деталей типа крыльчатки.
Целью .изобретения является повышение производительности при балансировке деталей типа крыльчатки.
Поставленная цель достигается тем, что механизм разложения выполнен в виде клина, установленного на основании с возможностью перемещения в направлении, перпендикулярном оси вращении шпинделя, указателя, жестко закрепленного на нем, шкалы, закрепленной на основании напротив указателя, и кинематически связанного со шпинделем- толкателя с роликом, контактирующим с рабочей поверхностью клина, а угол между рабочей поверхностью клина и направлением его неремещения соответствует углу между лопатками крыльчатки. Кинематическая связь между шпинделем ,и толкателем выполнена в виде ведущих и ведомых зубчатых колес с передаточным отношением I : 1, а ведущие колеса снабжены рукояткой с защелкой, предназначенной для соединения шпинделя с балансируемой деталью.
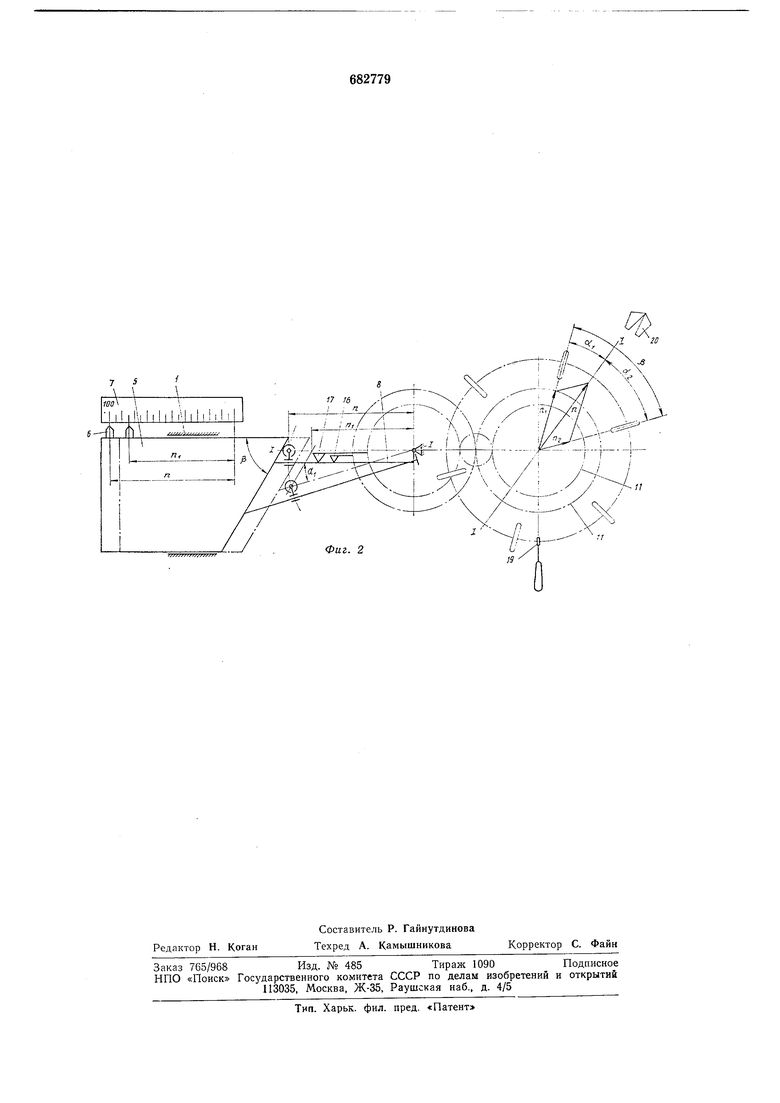
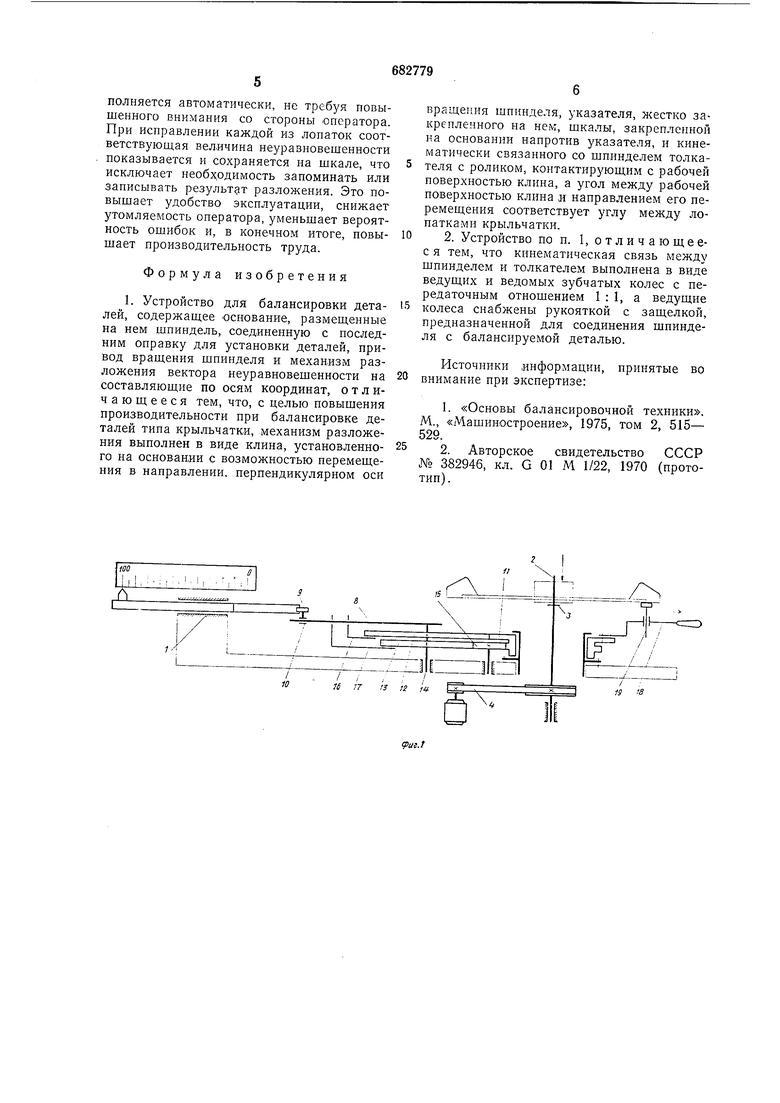
На фиг. 1 изображено предлагаемое устройство; на фиг. 2 - то же устройство, вид сверху.
Устройство для балансировки деталей содержит основание /, размещенные на нем шпиндель 2, соединенную с последним оправку 3 для установки деталей, привод 4 вращения щпинделя и механизм разложения вектора неуравновешенности на составляющие по осям координат, который выполнен в виде клина 5, установленного на основании / с возможностью неремещения в направлении, перпендикулярном оси вращения шпинделя 2, указателя 6, жестко закрепленного на нем, щкалы 7, закрепленной на основании 1 напротив указателя 6, и кинематически связанного со шпинделем 2 толкателя 8 с роликом 9, установленным на движке 10 и контактирующим с рабочей поверхностью клина 5, а угол р между рабочей поверхностью клина 5 и направлением его перемещения соответствует углу между лопатками крыльчатки.
Кинематическая связь между шпинделем 2 и толкателем 8 выполнена в виде ведущего // и ведомых 12, 13 зубчатых колес с передаточным отношением 1:1, при
этом ведомые кюлеса 12, 13 установлены на оси 14 с возможностью поворота относительно оси и друг друга. Ведомое колесо 12 связано с ведущим колесо.м // непосредственно, а ведомое колесо 13 - через паразитную шестерню 15. Кроме того, колеса 2, 13 соответственно связаны с поводками 16, 17, которые примыкают к одной стороне толкателя 8. С ведущим зубчатым колесом 11 жестко соединена рукоятка 18, на которой установлена защелка 19. предназначенная для соединения шпинделя с балансируемой деталью и удерживаемая в определенном положении с помощью шарикового фиксатора (на чертеже не показан). Неуравновешенность устраняют с помощью механизма 20.
Устройство работает следующим образом.
На оправку 3 устанавливают балансируемую деталь, например, типа крыльчатки и приводят ее во вращение. В процессе вращения измеряют параметры неуравновешенности и фиксируют на электронном указателе фазы и величины неуравновешенности (на чертеже не показан). Пусть, например, величина вектора неуравновешенности составляет п делений шкалы 7, а его направление, определенное по совмещению стрелок на электронном указателе фазы, совпадает с линией /-/, на которой расположен механизм 20 для устранения неуравновешенности. Перемещая движок 10 с роликом 9, устанавливают указатель 6
на шкале 7 против деления п. При этом рабочий радиус толкателя В пропорционален величине п. Затем посредством защелки 19 связывают ведущее зубчатое колесо //со шпинделем 2 и подводят одну из
лопаток (например, левую) к механизму 20 для устранения неуравновешенности. Ведущее колесо // при этом поворачивается на угло -иь Как следует из кинематики устройства толкатель 5 под действием пюводка 16 также поворачивается от исходного положения на угол а. Подвижный клин 5 смещается в новое положение и указатель 6 указывает деление отрезок nj пропорционален вектору неуравновешенности для данной лопатки детали.
Посредством механизма 20 для устранения неуравновешенности в соответствии с показанием «i производят исправление указанной лопатки детали (например, отрезая от нее определенную часть металла), затем подводят к механизму 20 для устранения неуравновешенности следующую лопатку детали. В этом случае толкатель 5 под действием второго поводка 17 повор ач.ивается на угол ао и на шкале 7 будет показана величина п, соответствующая второму вектору. После этого производится исправление второй лопатки.
Таким образом в устройстве операция
разложения вектора на составляющие выполняется автоматически, не требуя повышенного внимания со стороны оператора. При исправлении каждой из лопаток соответствующая величина неуравповешенности показывается и сохраняется на шкале, что исключает необходимость запоминать или записывать результат разложения. Это повышает удобство эксплуатации, снижает утомляемость оператора, уменьшает вероятность ошибок и, в конечном итоге, повышает производительность труда.
Формула изобретения
1. Устройство для балансировки деталей, содержащее основание, размещенные на нем шпиндель, соединенную с последним оправку для установки деталей, привод вращения шпинделя и механизм разложения вектора неуравновешенности на составляющие по осям координат, отличающееся тем, что, с целью повышения производительности при балансировке деталей типа крыльчатки, .механизм разложения выполнен в виде клина, установленного на основании с возможностью перемещения в направлении, перпендикулярном оси
вращения шпинделя, указателя, жестко закрепленного на нем, шкалы, закрепленной иа основании напротив указателя, и кинематически связанного со шпинделем толкателя с роликом, контактирующим с рабочей поверхностью клина, а угол между рабочей поверхностью клина л направлением его перемещения соответствует углу между лопатками крыльчатки.
2. Устройство по п. 1, отличающеес я тем, что кинематическая связь между шпинделем и толкателем выполнена в виде ведущих и ведомых зубчатых колес с передаточным отношением 1:1, а ведущие
колеса снабжены рукояткой с защелкой, предназначенной для соединения шпинделя с балансируемой деталью.
Источники информации, принятые во
20 внимание при экспертизе:
1. «Основы балансировочной техники. М., «Машиностроение, 1975, том 2, 515- 529.
2. Авторское свидетельство СССР № 382946, кл. G 01 М 1/22, 1970 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для балансировки деталей | 1978 |
|
SU728007A2 |
| Устройство для статической балансировки деталей | 1987 |
|
SU1420416A1 |
| БАЛАНСИРОВОЧНОЕ УСТРОЙСТВО | 1973 |
|
SU382946A1 |
| Устройство для определения величины дисбаланса при статической балансировке | 1981 |
|
SU993073A1 |
| Устройство для статической балансировки деталей | 1982 |
|
SU1097900A1 |
| СТАНОК ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ | 1971 |
|
SU291118A1 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЙ | 2002 |
|
RU2225602C2 |
| Способ измерения дисбаланса ротора и устройство для его осуществления | 1976 |
|
SU605139A1 |
| Станок для балансировки дисков с центральным отверстием | 1985 |
|
SU1244521A1 |
| СПОСОБ И УСТРОЙСТВО ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ КАРДАННЫХ ПЕРЕДАЧ | 2007 |
|
RU2353910C1 |