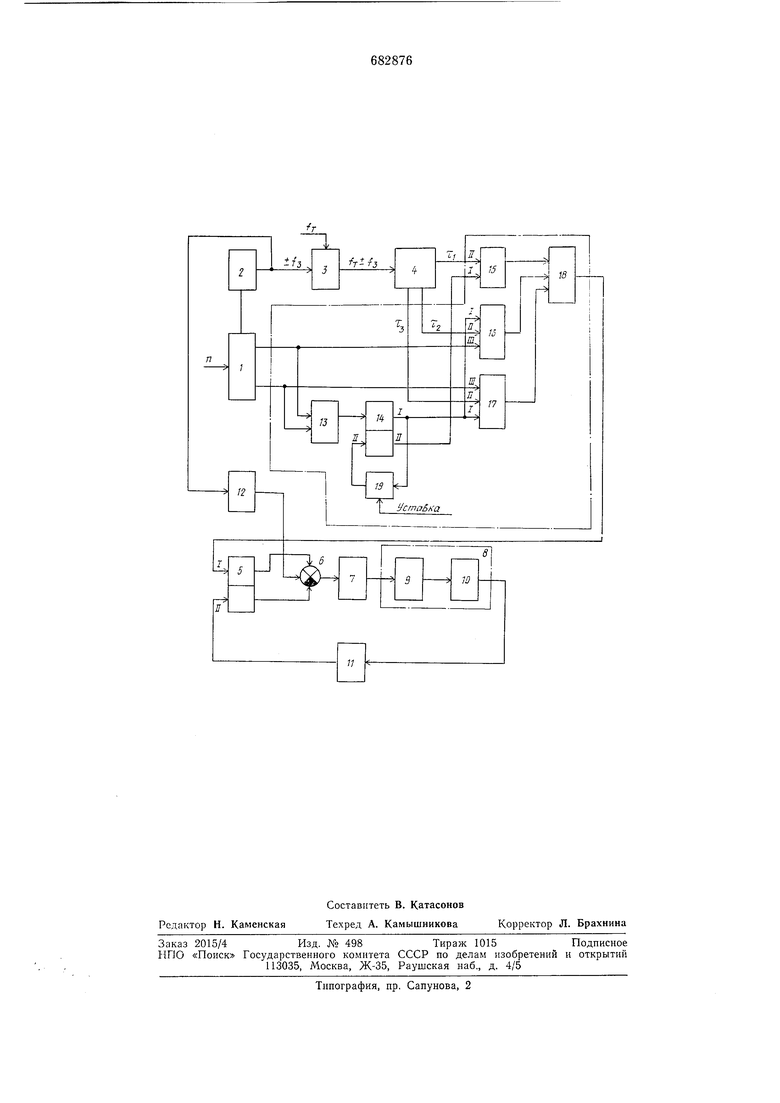
15, второй 16 и третий 17 элементы И, элемент ИЛИ 18 и реле времени 19.
Устройство работает следующим образом.
В блок 1 вводится информация о величине и иаправлении перемещения рабочего органа 10. Наличие сигнала на одном из выходов блока 1 зависит от задаваемого направления иеремеихения. Интернолятор 2 в соответствии с ииформадией, поступающей от блока 1, формирует имнульеы задания + /3 или -/3. которые поступают на управляющий вход вычислителя 3, а также па вход блока коррекции 12, при этом на основной вход вычислителя 3 поступают импзльсы опорной тактирующей частоты fr. Выходной сигнал блока 3, равный алгебраической сумме частот fT+f. ностунает на вход делителя частоты 4. В блоках 3, 4 импульсы задания / преобразуются в соответствующей фазовый сдвиг выходного импульсного сигнала п отпосительно позиционного датчика пути 11. (В исходном состоянии фазовый сдвиг сигнала п относительно сигнала датчика 11 составляет 180°). Сигнал Ti через элементы И и ИЛИ 15 и 18 поступает на первый вход триггера 5. Блок сравнения 6 выделяет сигнал ошибки в виде аналогового сигнала, который еуммируется с выходным сигналом блока 12 и иоетуиает через усилитель 7 иа привод 9. Привод 9 отрабатывает заданное перемещение, которое контролируется датчиком И.
При изменении направления движения (реверсе) изменяются сигналы на выходах блока 1, при этом на третий вход одного из элементов 16 или 17 поступает разрешающий сигнал, а формирователь импульсов 13 формирует импульсный сигнал, который переключает триггер 14. Сигнал со второго выхода триггера 14 запрещает прохождение сигнала п через элемент И 15. Сигнал с первого выхода триггера 14 запускает реле времени 1 и разрешает в соответствии с сигналом блока 1 прохождение на первый вход триггера 5 через элементы 16 или 17 и элемент ИЛИ 18 сигнала Т2 или тз с делителя 4.
Подача сигналов Т2 и тз, имеющих фазовый сдвиг относительно позиционного датчика II, равный примерно ±120°, обеспечивает значительный управляющий сигнал на выходе блока 6, что в свою очередь обеспечивает форсированное протекание переходных процессов в нриводе 9.
Длительность подачи сигнала та или тз определяется «Уставкой реле времени 19,
которая выбирается из условия обеспечения выбора зазора в кинематических цепях и трогания рабочего органа 10 с места. По истечении выдержки времени реле 19 возвращает триггер 14 в исходное состояиие. Па вход триггера 5 вновь поступает сшнал Т| и работа устройства характеризуется обычп1)1м режимом отработки импульсов задания ..,.
Применение предлагаемой системы ирограммного управления снижает динамическую ошибку в точках реверса рабочего органа при отработке медленно меняющегося входного сигнала теоретически до нуля;
практически из-за различного состояния кинематической цепи рабочего органа в момент изменения направления движения ошибки могут быть уменьшены в 3-4 раза и составляют лишь 0,03-0,05 мм.
Формула изобретения
Устройство для программного управления, содержашее последовательно соединенные блок ввода программы, интерполятор, блок коррекции, блок еравнения, усилитель, исполнительный механизм, позиционный датчик и первый триггер, выходы которого подключены к блоку сравнения, и делитель частоты, вход которого через вычислитель подключен к интерполятору, отличающееся тем, что, е целью повышения точности устройства, оно содержит реле времени, последовательно соединепные формирователь импз пьсов, второй триггер, первый элемент И и элемент ИЛИ, второй и третий элементы И, первые входы которых подключены к первому выходу второго триггера, вторые входы - к
первому и второму выходам делителя частоты, третьи входы - к выходам блока ввода программы и входам формирователя импульсов, а выходы - к другим входам элемента ИЛИ, выход которого соединен
с другим входом первого триггера, иервый выход второго триггера подключен к реле времени, выход которого соединен с другим входом второго триггера, другой вход первого элемента И подключен к третьему
выходу делителя частоты.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР №429417, кл. G 05В 19/18, 1972.
2. Тихомиров Э. Л. и др. Системы числового управления и перспективы их развития. «Машиностроение, М., 1975, с. 48- 49.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1978 |
|
SU744463A1 |
| Устройство для программного управления | 1978 |
|
SU746424A1 |
| Система числового программного управления | 1986 |
|
SU1386963A1 |
| Устройство для отображения информации на экране цветного видеоконтрольного блока | 1988 |
|
SU1529280A1 |
| Устройство для измерения мощности | 1990 |
|
SU1751685A1 |
| Устройство для кинематического дробления стружки на токарных станках с числовым программным управлением | 1981 |
|
SU1004974A1 |
| Копировальное следящее устройство для станков с программным управлением | 1982 |
|
SU1070508A1 |
| Устройство для автоматического контроля процесса сварки | 1984 |
|
SU1238921A1 |
| Устройство для программного управления | 1979 |
|
SU862117A1 |
| Устройство для регулирования расходов компонентов при смешении | 1977 |
|
SU696422A1 |