1
Изобретение относится к области автоматического управления и регулирования, в частности к системам программного управления, и предназначено для компенсации динамических ошибок, связанных с застоем рабочего органа в точках реверса, и может быть использовано, например, в металлорежущих станках с числовым программным управлением.
Известна система программного управления, состоящая из устройства числового программного управления, привода подачи, рабочего органа, датчика пути кругового типа, установленного на ходовом винте 1.
Недостатком указанной системы является низкая точность, обусловленная погрещностью ходового винта и мертвым ходом в соединении винт-гайка.
Наиболее ,близ.ким по технической сущности к предложенному техническому решению является устройство дляпрограммного управления, содержащее последовательно соединенные блок задания программы, интерполятор, первый элемент ИЛИ, блок управления, привод, исполнительный механизм и датчик перемещения исполнительного механизма, подключенный выходом к второму входу блока управления, третий вход которого через второй элемент ИЛИ
соединен с другим выходом интерполятора 2..:.
Недостаток этого устройства заключается в низкой точности.
5 Цель предложенного технического решения - повышение точности устройства.
Поставленная цель достигается тем, что устройство содержит формирователь импульсов, первый.и второй триггеры, коммутатор, элемент И, счетчик импульсов, третий элемент ИЛИ и ключевые элементы, первые входы которых соединены с выходами коммутатора, вторые входы - с первым входом элемента И и с входом устройства, а выходы - сдругими входами первого и второго элементов ИЛИ.. Первый вход коммутатора подключ.ен . к .выходу первого триггера и к первому входу третьего элемента ИЛИ, второй вход--к выходу
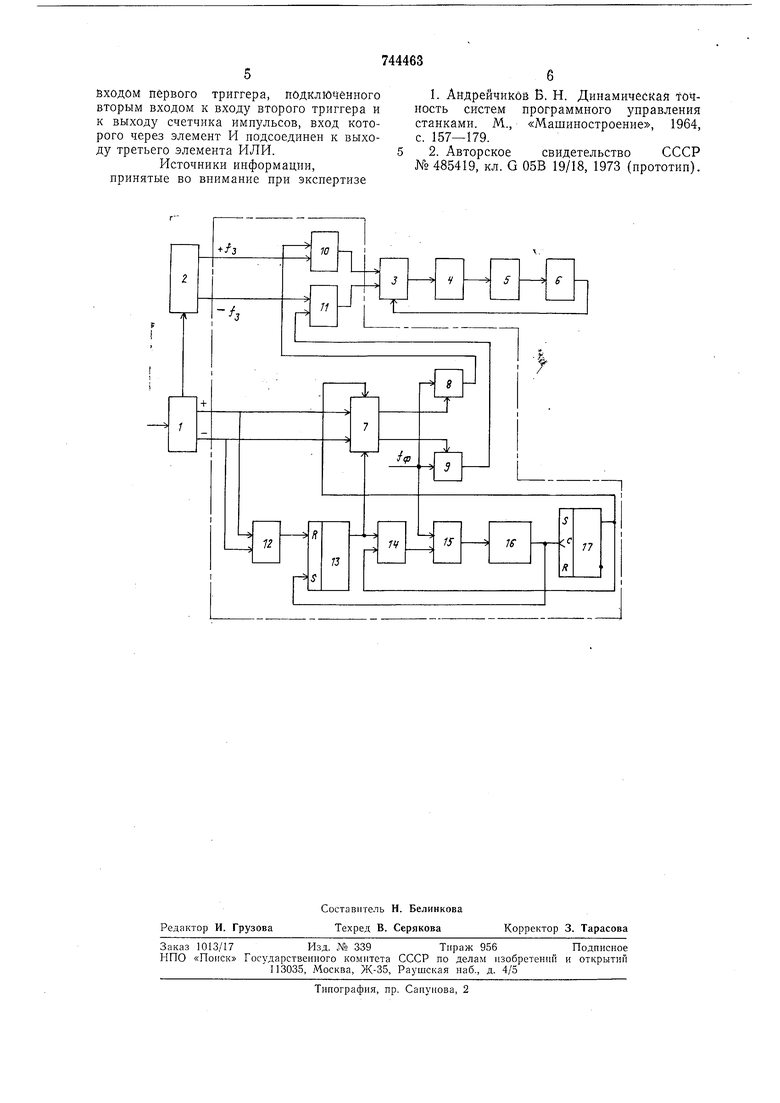
20 второго триггера и ко второму входу третьего элемента ИЛ.И, третьи входьГ-к другим вьгходам блока задания программыи ко входам формирователя импульсов, выход которого соединен с первым входом первого триггера, подключенного вторым входом к входу второго триггера и к выходу счетчика импульсов, вход которого через элемент И подсоединен к. выходу третьего элемента ИЛИ. Функциональная схема устройства показана на чертеже. VУстройство содержит блок Г задания нрограммы, интерполятор 2, блок 3 унравления, привод 4, исполнительный механизм 5, датчик 6 перемещения исполнительного механизма, коммутатор 7, ключевые элементы 8 и 9, первый 10 и второй 11 элементы ИЛИ, формирователь 12 импульсов, первый триггер 13, третий элемент ИЛИ 14, элемент И 15, счетчик 16 импульсов и второй триггер 17.; Устройство для программного управления работает следующим образом. В блок 1 вводится от программы информация-о величине и,направлении перемещения исполн-ительного механизма 5. Наличие сигнала на одном из выходов блока 1 задания программы зависит от задаваемого направления перемещения. Интерполятор 2 в соответствии с информацией, поступающей от блока 1, формирует импульсы задания, которые поступают через элементы ИЛИ 10 или И и блок 3 на привод 4. Привод 4 отрабатывает заданное перемещение, которое контролируется датчиком 6 поло)кения исполнительного механизма. При изменении направления движения (реверс) изменяются сигналы на выходах блока 1. При этом формирователь 12 формирует импульсный сигнал, который переключает триггер 13. Выходной сигнал триггера 13 через элемент ИЛИ 14 поступает на элемент И 15 и разрешает прохождение импульсов форсировки /Ф на вход счетчика 16. Одновременно коммутатор 7 в соответствии с сигналом от триггера 13 выдает разрешающий сигнал на прохождение импульсов форсировки /Ф на один из ключевых элементов 8 (или 9). Замыкание Одного из элементов 8 (или 9) определяется знаком предстоящего направления движения. При движении в направлении «+ замыкается элемент 8, в направлении «- - элемент 9. Импульсы форсировки /Ф через ключевой элемент 8 (или 9), один из элементов ИЛИ 10 (или 11) и блок 3 поступают на вход привода 4. Выбор частоты следования импульсов форсировки /Ф, равной или большей частоты задания /3, соответствующей ускоренному движению исполнительного механизма, обеспечивает форсировку переходных процессов в приводе подачи 4. Промежуток времени, в течение которого импульсы форсировки /Ф поступают на вход привода 4, определяется емкостью счетчика 16 и выбирается из условия обеспечения выбора зазоров в кинематических цепях привода 4 и трогания исполнительного механизма 5 с места. После выдачи первого импульса переполнения счетчика 16 триггер 13 перебрасывается и через коммутатор 7 запрещает прохождение импульсов форсировки /Ф через ключевой элемент 8 (или 9). Так как импульсы форсировки /ф( йбступйй1цие на привод 4, означают дополнительное перемещение исполнительного механизма 5, то необходимо на вход привода 4 подать такое же количество импульсов форсировки /Ф в противоположном направлении. Первый импульс переполнения, поступивший на счетный вход триггера 17 со счетчика 16, переключает его. Коммутатор 17 в соответствии с сигналом от триггера 17 замыкает другой ключевой элемент 9 (или 8). Время выдачи импульсов форсировки /Ф через элемент 9 (или 8) также определяется емкостью счетчика 16, второй импульс переполнения которого переключает триггер 17 и соответственно запрещает прохождение импульсов форсировки /Ф через элемент И 15 на вход счетчика 16, а через элемент 9 (или 8) - на вход привода 4. Для исключетия Потери информации о заданном перемещении импульсы форсировки /Ф имеют фазовый сдвиг относительно импульсов задания fa, чем исключается их совпадение на входах элементов ИЛИ 10 и 11. Применение предлагаемого устройства для программного управления снижает динамическую ошибку в точках реверса исполнительного механизма при отработке медленно меняющегося входного сигнала теоретически до нуля, а практически из-за различного состояния кинематической цепи привода 4 в момент изменения направления движения, ошибки могут быть уменьшены в 3-4 раза и составлять лишь 0,03-0,05 мм. Формула изобретения Устройство для программного управления, содержащее последовательно соединенные блок задания программы, интерполятор, первый элемент ИЛИ, блок управления, нривод, исполнительный механизм и датчик перемещения исполнительного механизма, подключенный выходом ко второму входу блока управления, третий вход которого через второй элемент ИЛИ соединен с другим выходом интерполятора, отличающееся тем, что, с целью повышения точности устройства, оно содержит формирователь импульсов, первый и второй триггеры, коммутатор, элемент И, счетчик импульсов, третий элемент ИЛИ и ключевые элементы, первые входы которых соединены ,с выходами коммутатора, вторые входы - с первым входом элемента И и со входом устройства, а выходы - с другими входами первого и второго элементов ИЛИ, первый вход коммутатора подключен к выходу первого триггера и к первому входу третьего элемента ИЛИ, второй вход - к выходу второго триггера и ко второму входу третьего элемента ИЛИ, третьи входы - к другим выходам блока задания программы и ко входам формирователя импульсов, выход которого соединен с первым
входом первого триггера, подключенного вторым входом к входу второго триггера и к выходу счетчика импульсов, вход которого через элемент И подсоединен к выходу третьего элемента ИЛИ.
Источники информации, принятые во внимание при экспертизе
1.Андрейчикбй Б. Н. Динамическая точность систем программного управления станками. М., «Машиностроение, 1964, с. 157-179.
2.Авторское свидетельство СССР №485419, кл. G 05В 19/18, 1973 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1979 |
|
SU890362A2 |
| Устройство для формирования управляющих программ | 1985 |
|
SU1257616A1 |
| Устройство для кинематического дробления стружки на токарных станках с числовым программным управлением | 1981 |
|
SU1004974A1 |
| Устройство для программного управления станком | 1976 |
|
SU593191A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ПРИВОДОМ | 1979 |
|
SU826284A1 |
| Устройство для программного управления | 1977 |
|
SU682876A1 |
| Устройство для программного управления | 1980 |
|
SU920637A1 |
| Намоточное устройство | 1981 |
|
SU994386A1 |
| Устройство для числового программного управления | 1983 |
|
SU1124251A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ПРИ ПРОГРАММНЫХ ИСПЫТАНИЯХ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ | 2007 |
|
RU2365965C2 |
