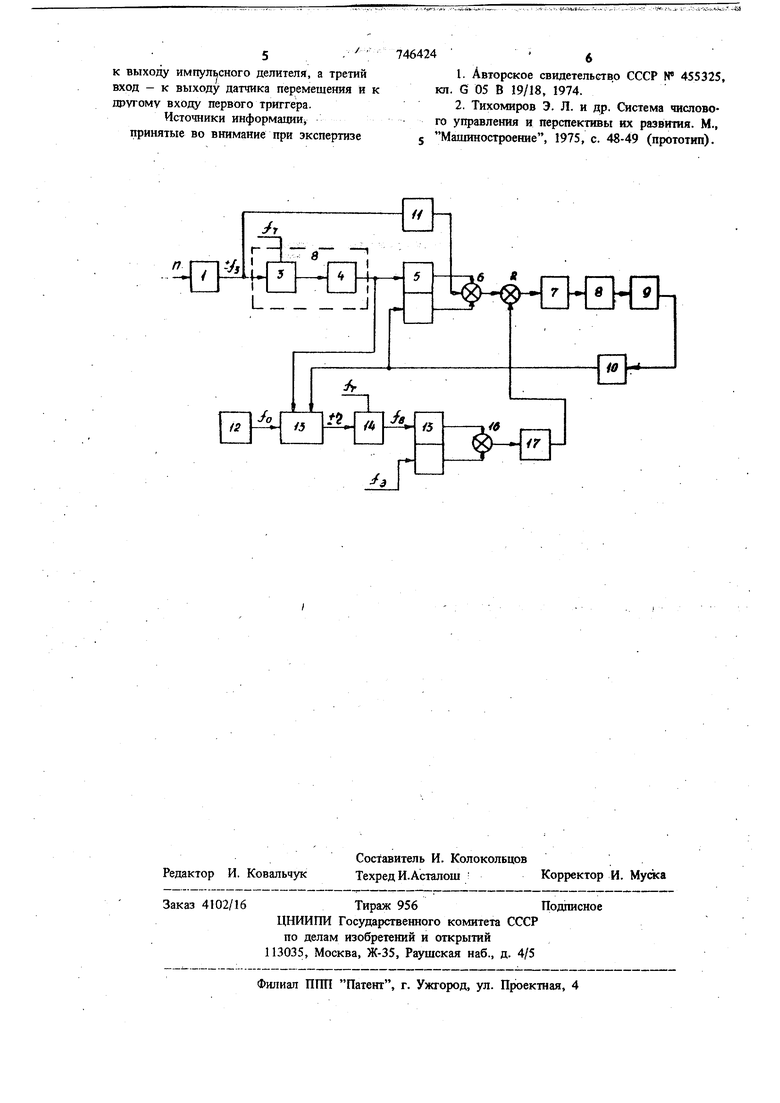
Изобретение относится к автоматике и выч лительной технике, в частности к системам программного управления и предназначено для компенсации ошибок слежения при отработке постоянного и медленно изменяющегося входного воздействия и может быть использовано, например в металлорежущих станках с числовым программным управлением. Известно устройство для программного управления, состоящее из последовательно соединенных блока ввода программы, интерполятора и исполнительного органа 1 . Наиболее близким техническим решением к данному изобретению является устройство для программного управления, содержащее последовательно соединенные первый усилитель привод, исполнительный механизм и датчик перемещения, а тсакже последовательно соединенные блок задания программы, первый сумматор, импульсный делитель, первый тригг и первый элемент сравнения, подключенный другим входом к выходу йлока коррекции, вход которого соединен с выходом блока задания программ 2. Недостатком известных устройств является наличие ошибок слежения при отработке посто янного и медленно изменяющегося входного воздействия, обусловленных нелинейностью и нестабильностью регулировочнь1х характеристик блоков.-Цель изобретения - повышение точности устройства путем уменьшения :ошибок слежения при отработке постоянного и медленно изменяющегося входного воздействия, обусловленных нелинейностью и нестабильностью регулировочных характеристик блрков системы. Поставленная цель достигается тем, что устройство содержит последовательно соединенные формирователь импульсов, фазоимпульсный преобразователь, импульсно-фазовый преобразователь, второй триггер, второй элемент сравнения, второй усилитель и второй сумматор, другой вход которого соединен с выходом первого элемента сравнения, а выход - со входом первого усилителя, второй вход фазоимпульсного преобразователя подключен к- выходу , импульсного делителя, а третий вход - к выхо37яу датчика перемещения и к другому входу первого триггера. На чертеже представлена блок-схема устройства. Схема .содержит блок 1 задания программы второй 2 к первый 3 сумматоры, импульсный делитель 4, первый триггер 5, первый, элемеит 6 сравнения, первый усилитель 7, привод 8, исполнительный механизм 9, датчик 10 пере мещения, блок 11 коррекции, формирователь 12 импульсов, фаза-импульсный преобразователь 13, импульсно-фазовый преобразователь 14, второй триггер 15, второй элемент 16 срав нения и второй усилитель 17. Устройство работает следующим образом. Блок 1 в соответствии с вводимой от прог раммы информацией о величине и направлении перемещения механизма 9, формирует импульсы задания +f3 или -fa, которые поступают на управляющий вход сумматора, а также на вход блока И. При этом на основной вход сумматора 3 поступают импульсы опорной тактирующей частоты fj. Выходной сигнал сумматора 3 равный алгебраический сумме частот поступает на вход делителя 4. В сумматоре 3 и делителе 4 импульсы задания преобразуются В соответствующий фазовый сдвиг выходного импульсного сигнала относительно сигнала датчика 10 (в исходном состоянии фазовый сд)виг между сигналом делителя 4 и сигналом датчика 10 равен 180°). Элемент 6 выделяет сигнал ошибки в виде аналогового сигнала, который суммируется с выходным сигналом блока И и поступает через сумматор 2 и усилитель 7 на привод 8, который отрабатывает заданное перемещение, контролируемое датчиком 10. При непрерывном задании и отработке пере мещения в системе устанавливается ошибка, величина которой пропорциональна фазовому сдвигу выходного сигнала делителя 4 относительно сигнала датчика 10. В преобразователе 13 осуществляется пре . образование ошибки слежения системы в пропорциональное количество импульсов i.. Формирование импульсов ошибки + осуществляется периодически при поступлении с формирователя 12 разрешающего импульса опроса. Длительность импульса опроса равна периоду повторения выходного сигнала делителя 4, а частота fp выбирае ся из условия о пп Д® п.п частота, соответствующая гголосе пропускания следящей системы. Дискрет ность опроса повышает устойчивость следящей системы. В зависимости от знака ошибки на выходе преобразователя 13 формируются импульсы + 2 или 7. Преобразовательны осуществляе преобразование импульсов ошибки в пропорциональный фазовый сдвиг выходного импульсного сигнала fg относительно импульсов эталонной частоты fg. Фазовый сдвиг сигналов fg относительно сигналов f приводит к изменению скважности выходных сигналов триггера 15. Элемент 16 преобразует выходной импульсный сигнал триггера 16 в аналоговый. Этот сигнал через усилитель 17, сумматор 2 и усилитель 7 гоступает на вход привода 8 и вызывает соот-. ветствующее изменение скорости перемещения и положения механизма 9 в направлении уменьшения ошибки слежения по пути: При поступлении очередного импульса опроса fp с формирователя 12, после закончившегося переходного процесса по компенсации предь дущего измеренного. значения ошибки и отсутствии новой ошибки, сигнал на выХоде усилителя 17 сохраняется, т. к. сохраняется фазовый сдвиг импульсов fg относительно импульсов fg. При появлении нового значения ошибки вновь формируются импульсы + || или - 2 , которые, изменив фазовый сдвиг импульсов fg относительно fg вызовут изменение выходного сигнала усилителя 17 на величину, пропорциональную новому значению ошибки. Применение данного устройства снижает ошибку слежения теоретически до нуля, а практически до величины, определяемой амплитудой высокочастотных колебаний рабочего органа, имеющих случайный характер и неотрабатываемых следящей системой; ошибка обработки плавных контуров, обусловленная нелинейностью и :нестабильностью регулировочных характеристик йпоков системЬ, снижается до уровня 0,02 ... 0,03 мм. Формула изобретения . Устройство для программного управления, содержащее последовательно соединенные первый усилитель, привод, исполнительный механизм и датчик перемещения, а также последовательно соединенные блок задания программы, первый сумматор, импульсный делитель, первый триггер и первый элемент сравнения, подключенный другим входом к выходу блока коррекции, вход которого соединен с выходом блока задания программы, отличаюш;ееся тем, что, с целью повышения точности устройства, оно содержит последовательно соединенные формиррватель импульсов, фазо-импульсный преобразователь, импульсно-фазовый г еобразователь, второй триггер, второй элемент сравнения, второй усилитель и второй сумматор, ДР5ТОЙ вход которого соединен с выходом первого элемента сравнения, а выходсо входом первого усилителя , второй вход фазо-импульсного преобразователя подключен
к выходу импульсного делителя, а третий вход - к выходу датчика перемещения и к другому входу первого триггера. Источники информации принятые во внимание при экспертизе
746424 4
1.Авторское свидетельство СССР М 455325, кл. G 05 В 19/18, 1974.
2.Тихомиров Э. Л. и др. Система числового управления и перспективы их развития. М.,
5 Машиностроение, 1975, с. 48-49 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Следящая система программного управления станком | 1977 |
|
SU714358A1 |
| Устройство для программного управления | 1977 |
|
SU682876A1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1990 |
|
SU1707723A1 |
| Следящий электропривод с компенсацией люфта | 1985 |
|
SU1273875A1 |
| Копировальное следящее устройство для управления станком | 1982 |
|
SU1104470A1 |
| Устройство для управления вибрацией | 1981 |
|
SU1003017A1 |
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1233099A1 |
| Фазовая следящая система с комбинированным управлением | 1978 |
|
SU746423A1 |
